华南理工大学学报(自然科学版) ›› 2024, Vol. 52 ›› Issue (11): 134-140.doi: 10.12141/j.issn.1000-565X.230777
无人驾驶车辆感知空间的构建及可感知性判别
王晓飞1( ), 王子旗1, 丁振中1, 郭月利2, 姚江贝2
), 王子旗1, 丁振中1, 郭月利2, 姚江贝2
- 1.华南理工大学 土木与交通学院,广东 广州 510640
2.广东省交通规划设计研究院集团股份有限公司,广东 广州 510507
Research on the Construction and Evaluation Methods of the Perceptual Space of Unmanned Vehicles
WANG Xiaofei1(), WANG Ziqi1, DING Zhenzhong1, GUO Yueli2, YAO Jiangbei2
- 1.School of Civil Engineering and Transportation,South China University of Technology,Guangzhou 510640,Guangdong,China
2.Guangdong Communication Planning & Design Institute Group Co. ,Ltd. ,Guangzhou 510507,Guangdong,China
摘要:
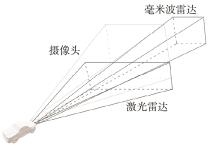
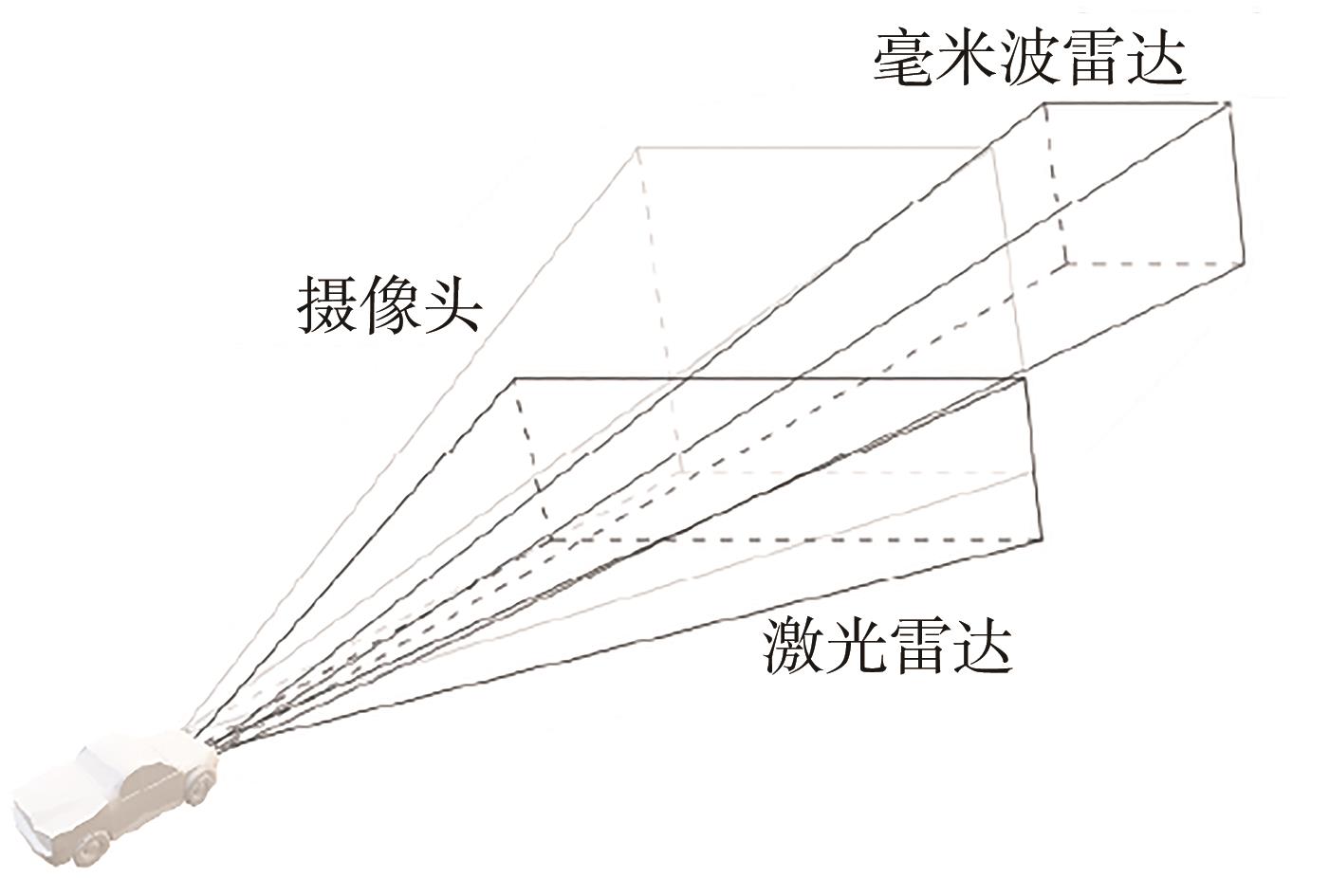
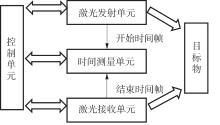
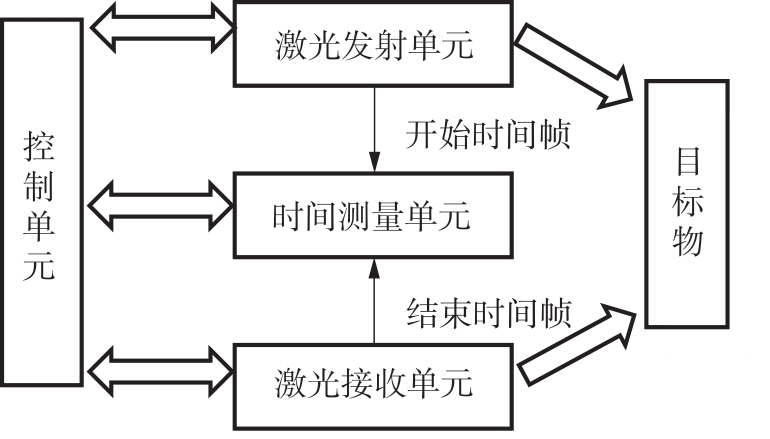
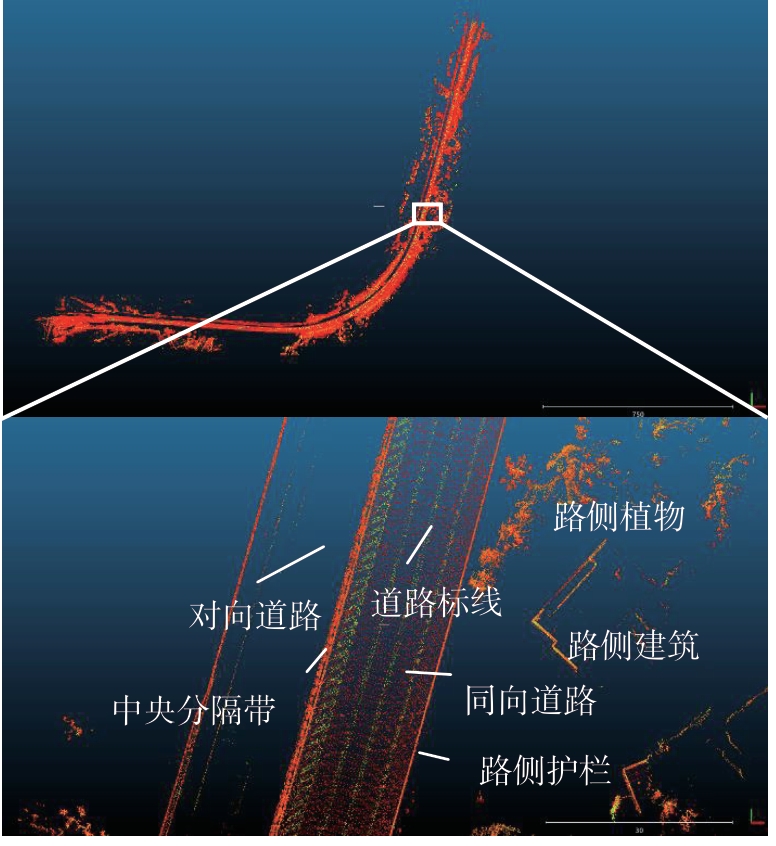
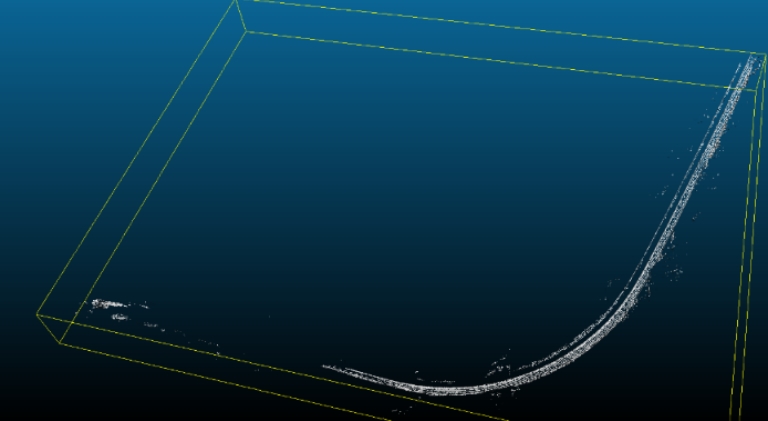
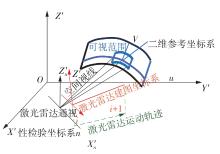
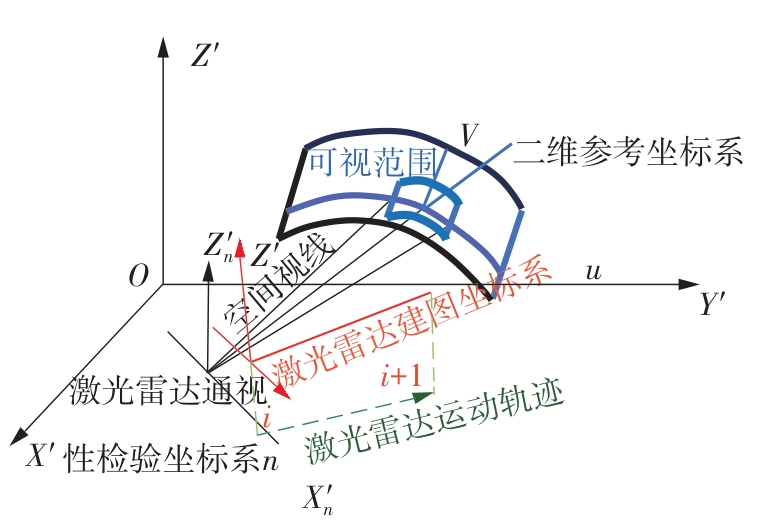
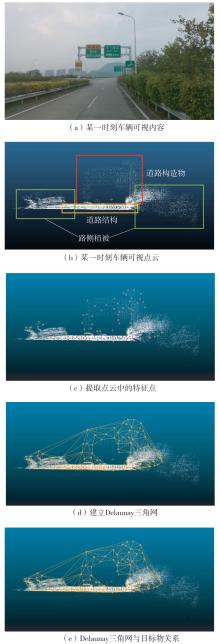
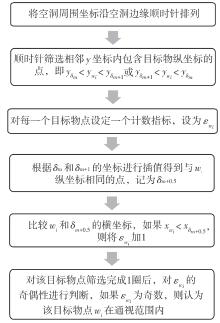
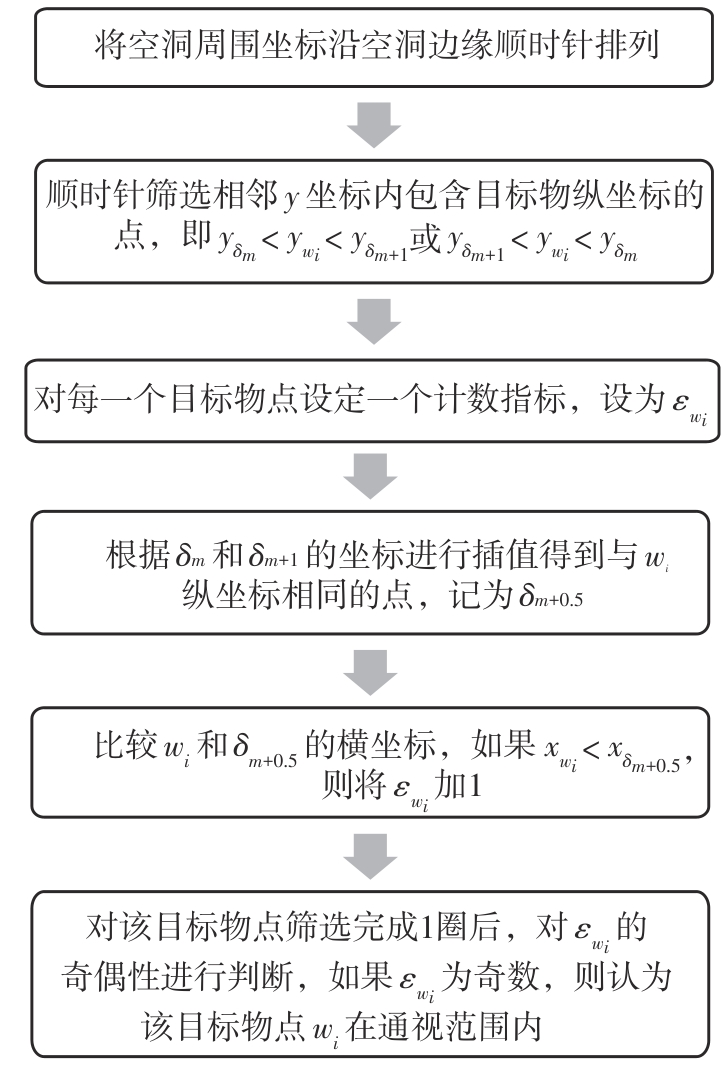
无人驾驶车辆的传感器代替人眼感知道路空间的信息,保障一定感知空间的可感知性,是无人驾驶安全运行的重要前提。因此,该文在国内外研究文献调研以及相关软硬件技术分析的基础上,分析了当前无人驾驶车辆感知技术的局限性,包括激光雷达、摄像头和毫米波雷达等传感器的识别范围和特性;利用激光雷达和组合导航系统对道路的现实信息进行采集,进一步利用收集到的点云数据、定位信息、同步定位与建模算法构建无人驾驶车辆的三维感知空间,实现了道路的三维数字模型构建。同时在三维点云地图中进行测距能力、水平视场角和垂直视场角等参数数学表达模型构建,利用空间坐标变换方法,将传感器识别范围内的三维点云数据进行分离,并转换到统一的坐标系下。最后利用Delaunay三角化方法,构建出能够反映感知空间特性的三维模型,从而实现三维感知空间的可感知性的判定方法。为验证该文方法的实用性和准确性,利用实地采集的数据对算法进行了测试。测试结果表明,该文提出的方法具有良好的鲁棒性,能够在复杂的道路环境中稳定工作,可以准确评估无人驾驶车辆的感知能力。这一研究成果不仅为无人驾驶车辆的道路设计和安全评估提供了科学依据,也为无人驾驶技术的进一步发展和应用提供了强有力的技术支持。
中图分类号: