华南理工大学学报(自然科学版) ›› 2023, Vol. 51 ›› Issue (8): 1-11.doi: 10.12141/j.issn.1000-565X.220779
所属专题: 2023年交通运输工程
搭接相位信号交叉口非机动车过街行为分析
温惠英 刘浩 杜颖新 赵胜
- 华南理工大学 土木与交通学院,广东 广州 510640
Analysis of Crossing Behavior of Non-Motor Vehicle at Overlap Phase Signal Intersections
WEN Huiying LIU Hao DU Yingxin ZHAO Sheng
- School of Civil Engineering and Transportation,South China University of Technology,Guangzhou 510640,Guangdong,China
摘要:
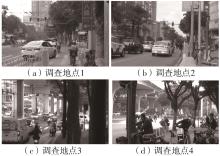
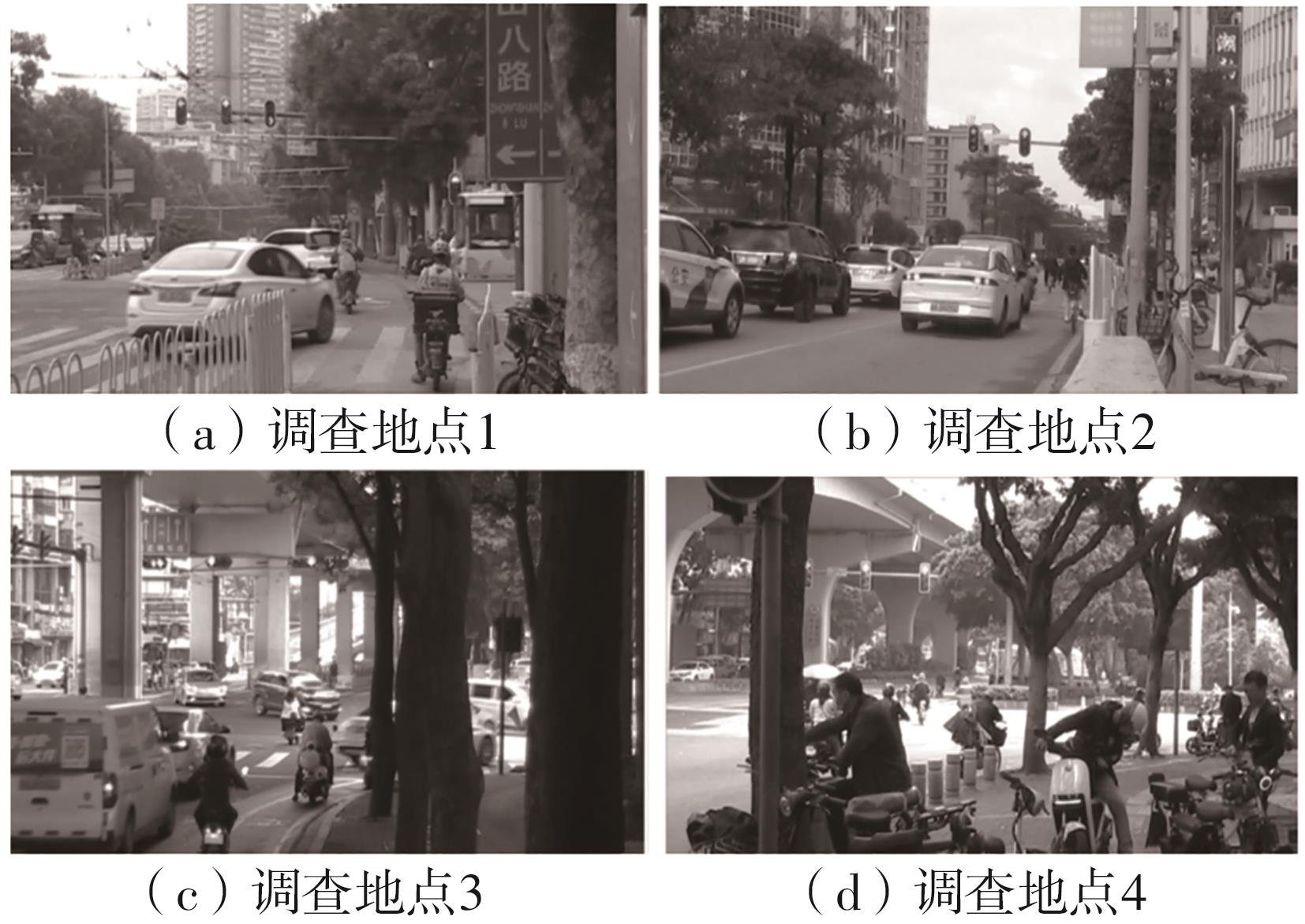
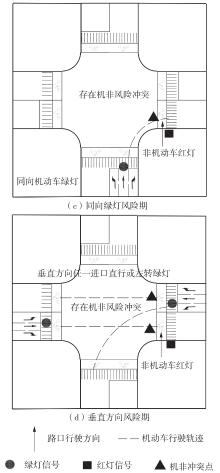
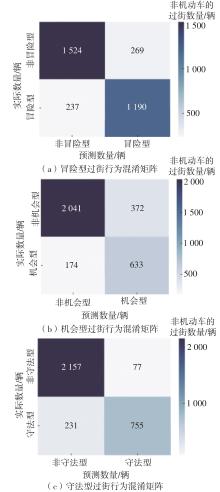
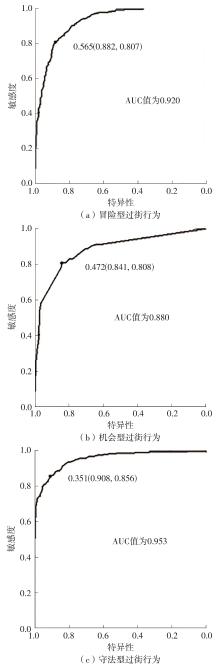
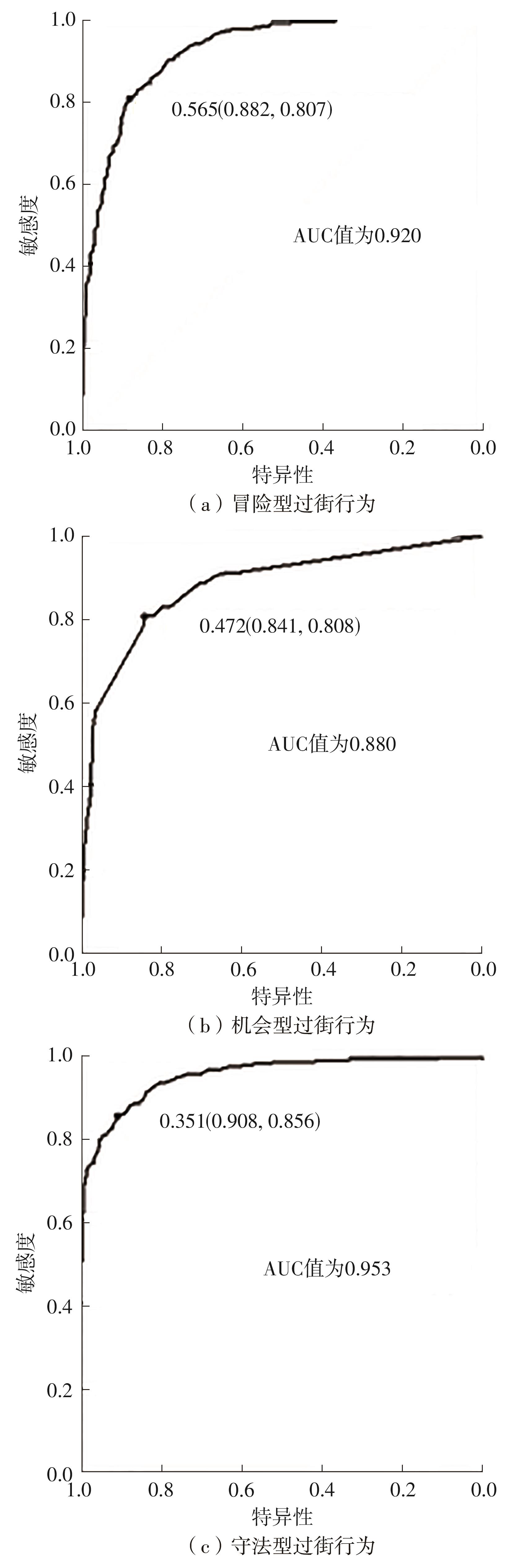
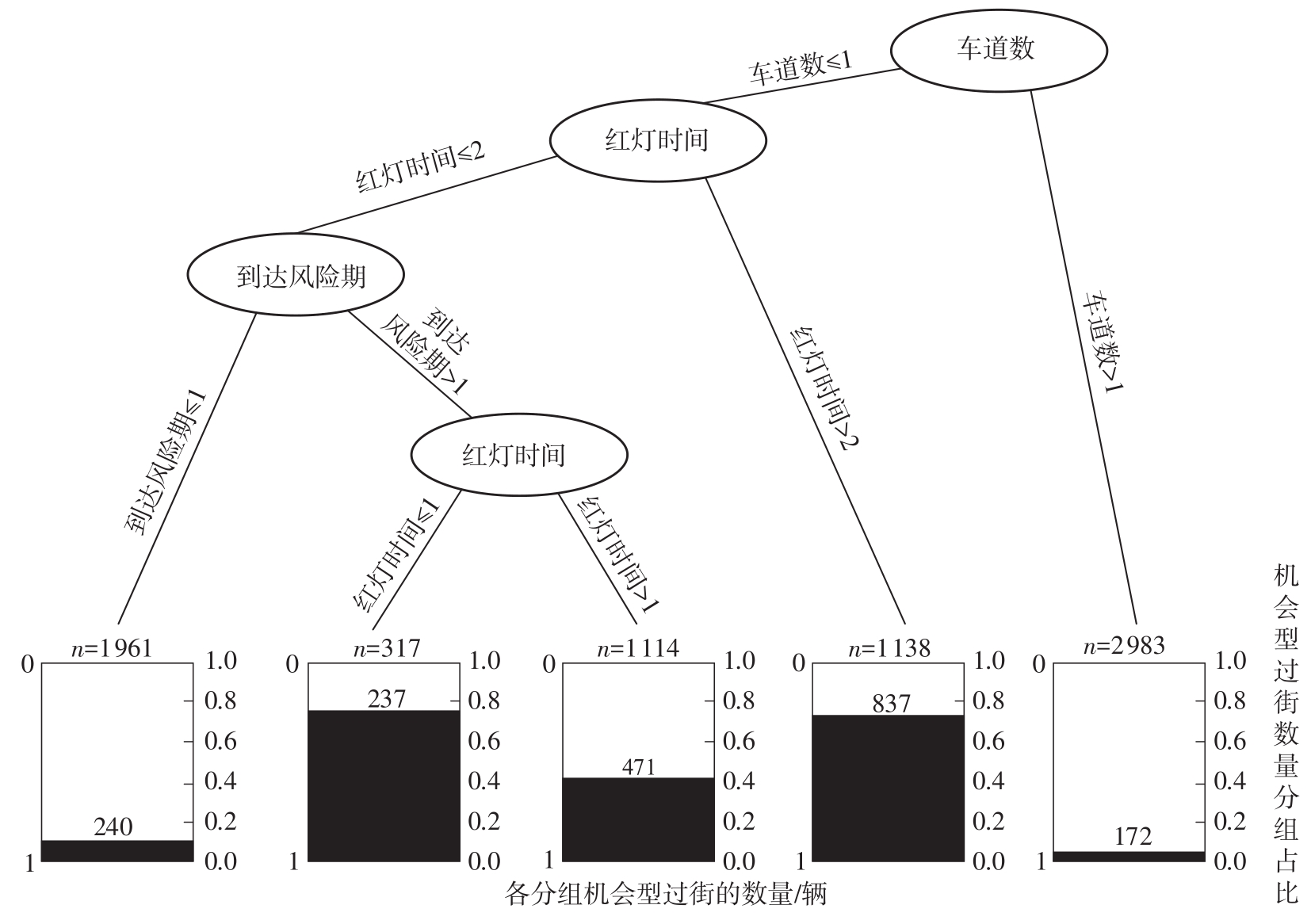
为提高信号交叉口非机动车通行的安全水平,本研究以广州市典型的搭接相位控制信号交叉口的调查数据为基础,基于C5.0决策树算法对非机动车过街行为进行影响因素分析。考虑到一个信号周期内的不同时段对非机动车过街行为的影响,本研究将一个完整的信号周期按照非机动车过街的风险冲突划分为对向绿灯风险期、同向绿灯安全期、同向绿灯风险期和垂直方向风险期4个风险时段,并根据非机动车在交叉口的等待选择和闯红灯情况将过街行为分为冒险型、机会型和守法型3类,通过构建C5.0决策树模型分别研究3类过街行为的影响因素并分析评价模型的分类效果。结果表明:决策树模型分类结果的整体准确率大于83.04%,AUC(受试者工作特征曲线下的面积)值大于0.880,模型预测精度较优;搭接相位控制信号交叉口非机动车的过街行为主要与交通环境显著相关,而与骑手的行为因素显著性较低,到达风险期、非机动车信号灯设施、冲突机动车流量、车道数和过街风险对冒险型过街行为的发生存在显著影响,其中到达风险期为最主要的影响因素;车道数、红灯时间和到达风险期对机会型过街行为的发生存在显著影响,其中车道数为最主要的影响因素;冲突机动车流量、信号周期、车道数、过街区域和过街风险对守法型过街行为的发生存在显著影响,其中冲突机动车流量为最主要的影响因素。
中图分类号: