2022 Transportation Engineering
Under the background of dual-carbon policy, it is imperative to maintain ecological balance and reduce carbon emissions. Nowadays, it is very important to accurately measure the carbon emission index of vehicles on a wide range of road networks. Therefore, this study proposed a measuring method of vehicle carbon emission in expressway network based on multi-source data fusion. Firstly, a basic data cleaning method for carbon emission statistics was proposed to clean the basic data required for subsequent carbon emission calculation. Secondly, the highway carbon emission calculation model was established, and then the related calculation process was designed. Finally, taking the whole highway network of Guangdong province as an example, this paper calculated the vehicle carbon emission from September 2020 to June 2021, and compared the calculation results with China’s carbon accounting database.Through this method, the proposed method was proved to be scientific and reliable. The research shows that the average carbon emission of mini buses in Guangdong province is small, but the total carbon emission accounts for the largest proportion of all types of vehicles, up to 52.1%; the total carbon emission of gasoline vehicles accounts for 49.8%, which is higher than that of diesel vehicles (45.4%) and of other energy vehicles (4.8%). Vigorously promoting new energy vehicles can effectively reduce the carbon emission of expressways. In addition, the study finds that there are significant differences in the travel patterns of different vehicles under COVID-19, but the overall impact on the transportation economy is limited.
Accurate identification of traffic accident risk and timely mastering the change of traffic crash risk are of great significance for proactive prevention and reduction of traffic accident. Most of the existing traffic crash identification studies are based on real-time and dynamic parameters such as traffic flow and traffic conflict. The application of risky driving behavior in traffic accident risk detection is limited by the constraints of previous data acquisition technologies. To more accurately identify the risk of road traffic crashes, this study introduced risky driving behavior and traffic operating status and other big data, and extracted sharp acceleration, deceleration, turns, merge into other lane, traffic volume, average speed, and congestion index as variables. And traffic accident identification models were constructed based on accident data. The traffic accident identification model was evaluated based on the logistic regression algorithm. On the one hand, the contribution of risky driving behavior in traffic accident identification was quantified; on the other hand, the trend of traffic accident occurrence probability before and after the accident was analyzed. The results show that the sensitivity and AUC values of the traffic accident identification model considering both traffic operation state and risky driving behavior are increased by 5.00% and 0.03, respectively. The false alarm rate and missing report rate are decreased by 1.78% and 5.00%, respectively, which shows better fitting effect of the model. In addition, before and after the occurrence of traffic accidents, the risk probability of traffic crashes shows an obvious trend of rise, which is the key period of traffic accident prevention and control. The measures should be taken in corresponding sections in time to curb the rising trend of traffic crash risk and avoid the occurrence of traffic crashes. This study can provide intuitive basis for traffic accident prevention, and active prevention and control.
This paper carried out a detailed study on the damping characteristics of the eddy current coupling beam damper, which can start to dissipate energy under small deformation of the replaceable coupling beam. Based on the analysis of magnetic circuit theory, the study proposed the optimal arrangement of permanent magnet pole in eddy current damper. In other words, the permanent magnet poles parallel to the direction of conductor motion were arranged alternately, and the permanent magnet poles perpendicular to the direction of conductor motion were arranged in the same direction. In view of this, two kinds of eddy current dampers were designed, one of which is the plate eddy current damper with the conductor plate moving straight in the magnetic field and the other is the rotary eddy current damper with the gear-rack mechanism to amplify the rotation speed of the conductor plate in the magnetic field. Two kinds of eddy current dampers were used in the replaceable coupling beam, and the finite element simulation of the new eddy current coupling beam damper installed on the replaceable coupling beam was carried out, which revealed the nonlinear mechanical behavior of eddy current damping. It shows that the damping coefficient and stiffness coefficient are strongly related to the frequency. The higher the loading frequency, the lower the energy consumption efficiency and the higher the dynamic stiffness of the structure. So, the eddy current damper is more suitable for low frequency working conditions, and at this time, the damping coefficient of the eddy current damper is large, the energy consumption efficiency is high, and the stiffness coefficient is small, which basically does not change the natural vibration characteristics of the structure. Therefore, it is of great value in real-world application.
In order to explore the influence of the highway roadside environment on the driver’s attention,optimize the roadside landscape and traffic sign settings,and improve the driving safety,this study determined the roadside environment risk level interval by quantitatively analyzing the driver’s attention distribution. Four types of typical scene were selected according to the actual state of the roadside environment, and field driving tests were carried out to collect data such as driver’s eye movement parameters and heart rate. The driver’s eye movement on the corresponding road section was analyzed,including fixation behavior,scan behavior and blinking behavior. On this basis,the obvious eye movement index that characterizes the driver’s attention was determined as the fixation parameter. According to the actual scene corresponding to the driver’s fixation point and the position of the point in the visual field, the driver's visual field area was divided into three parts, namely the roadside area (S area),the way area (W area) and the car area (C area). By constructing the driver’s attention distribution model,the roadside environment was quantified and expressed by the ratio of attention region. The relationship model between the ratio of attention region and the driver’s heart rate growth rate was established,and the risk level interval was divided. The results show that the complexity of the roadside environment has a significant impact on the driver’s eye movement behavior. Compared with scan and blink,the driver’s fixation parameter can significantly characterize the driver’s attention state. When driving on the road,the driver’s fixation point moves in the view field,the ratio of attention region is the ratio of cumulative fixation time in the S area and the total fixation time of the S area and the W area. Its safety interval is [9.93%,62.10%],the risk interval is [6.44%,9.93%) and (62.10%,76.93%],and the danger interval is [0,6.44%) and (76.93%,100%]. This research can provide a reference for the safety evaluation and decision-making of roadside landscape improvement.
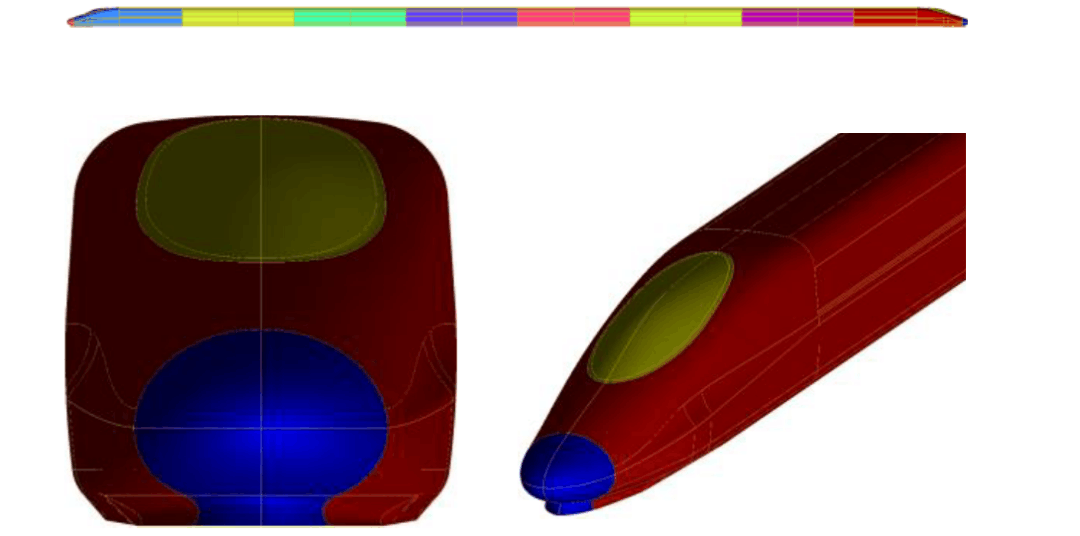
To solve the safety problem of collision between a high-speed intelligent vehicle and a low-speed vehicle on the superhighway, the vehicle braking collision avoidance system was studied by using the method of co-simulation. CarSim was used to establish the vehicle dynamics model and set the front vehicle parameters, road parameters and sensor parameters, and the control model based on vehicle distance and speed was established in MATLAB/Simulink. The signal connection is established through the input and output parameter interface module of CarSim software. When the speed of the front car is 100, 120 and 140 km/h, and the speed of an intelligent vehicle is 140, 160 and 180 km/h, respectively, the control model sends the braking deceleration signal to the intelligent vehicle through the real-time distance and speed collected by the sensor and establishes the emergency braking collision avoidance strategy for the vehicle on the superhighway. The results show that when the road adhesion coefficient is 0.60 and the car is braked on the flat straight section of the superhighway, the optimal wheel cylinder pressure is 7 MPa, and at this time, the braking distance of the car is 170.3 m at a speed of 160 km/h. The front car travels at a speed of 100, 120 and 140 km/h, and the smart car brakes at 140, 160 and 180 km/h, respectively, to the same speed as the car in front, requiring relative distances of 10.8, 10.7 and 10.5 m, respectively. When the road adhesion coefficient is 0.60, the vehicle speed of the front vehicle is 100, 120 and 140 km/h, respectively. When the initial cylinder pressure is 1 MPa and the intelligent vehicle braking decelerates to the same speed as the front vehicle, the distance between the front suspension of an intelligent vehicle and the rear suspension of the vehicle in front is 3.1, 3.5, and 3.8 m, respectively. When the initial cylinder pressure is 3 MPa and the intelligent vehicle braking decelerates to the same speed as the front vehicle, the distance between the front suspension of an intelligent vehicle and the rear suspension of the vehicle in front is 7.0, 7.3, and 7.7 m, respectively. Through the CarSim/Simulink co-simulation platform of vehicle emergency braking and collision avoidance control, the validity and accuracy of superhighway braking and collision avoidance model are verified, which can improve the safety of superhighway driving.
A metro transfer passenger flow prediction model was proposed based on the seasonal decomposition of time series by loess(STL)and Gated Recurrent Unit(GRU),in order to enrich the research on metro internal transfer passenger flow prediction and to better formulate the metro operation plan.The prediction process was divided into three stages by the model.In the first stage,the raw automatic fare collection(AFC)data are preprocessed,where the travel path of passengers is identified using the graph-based depth-first search algorithm and the transfer passenger flow time series are constructed.In the second stage,the transfer passenger flow time series are decomposed into the trend component,seasonal component and remainder component by the STL;while the outliers of remainder component are eliminated and filled using the 3σ principle.In the third stage,the GRU model is built and the related training and prediction are processed through the deep learning library Keras.The model performance was validated with the passenger flow data of Xizhimen Station of Beijing metro.The result shows that,compared to the following 3 models which are long short-term memory neural network(LSTM),GRU and STL-LSTM model,the STL-GRU prediction model can improve the prediction accuracy of transfer passenger flow on weekdays(excluding Friday),Friday and weekends,and the mean absolute percentage errors of the prediction results can be reduced by at least 2.3%,1.36%,and 6.42%,respectively.
With the increase of residents’ travel demand, there are higher requirements for bus operation efficiency and service quality. But bus operation companies usually adopt single-line scheduling, which often leads to the mismatch between passenger flow and transport capacity input, low bus service level, and resource utilization inefficiency. A more efficient scheduling optimization method is urgently needed. In the combined scheduling mode, manpower and vehicles are shared among multiple lines, which helps to integrate the existing bus resources and improve the matching degree of supply and demand of transport capacity and bus operation efficiency. In this paper, the identification rules of the cross-line scheduling line group and the determination method of the number of cross-line vehicles were proposed based on the characteristics of passenger flow. The optimization goal was to minimize the sum of passenger travel costs and bus operating costs, and an optimization model of bus cross-line combined scheduling with cross-line vehicles was constructed. The departure type and departure interval was encoded and it was solved by an improved genetic algorithm. The lines No.668 and No.122 in Beijing were selected as the case of cross-line combination scheduling, and the average waiting time of passengers, line load factor, capacity matching degree, passenger flow intensity and other indicators were introduced to evaluate the effectiveness of the optimization model. The results show that, under the condition of bus cross-line scheduling, the average waiting time of passengers on the supported bus lines is shortened by 11.8%; the line load factor is reduced by 9.8%; the capacity matching degree and passenger flow intensity are increased by 7.7% and 8.7%, respectively; passenger travel costs and bus operating costs are reduced by 15% and 6%, respectively.
In order to alleviate the parking difficulty, make more balanced use of parking resources and realize the dynamic response to parking demands, this study established an integer programming model for dynamic reservation and allocation of shared parking slots in multiple parking lots by taking several adjacent off-street parking lots as the research object. Aiming at making full use of parking resources and saving users’ parking costs, the model adopts linear weighting to combine the goals and adaptively selects dynamic weight coefficients according to the real-time number of parking requests. The allocation results were optimized iteratively by adjusting the parking requests from the car that does not arrive. In addition, dynamic pricing mechanism was introduced to balance the utilization of each parking lot. The model was evaluated by four indicators: parking space utilization rate, parking request acceptance rate, average walking distance and equilibrium degree of parking area. the model was verified by simulation experiments. The results show that, compared with the traditional unadjusted model, the proposed model can increase the utilization and acceptance rates by 10.70% and 20.08%, respectively, on average by iteratively optimizing the unreached parking requests. The improvement degree of utilization increases first and then decreases with the number of parking requests. The average walking distance of users increases by about 10m, but it still meets the travel needs of users. Compared with the static weight model, the utilization rate and acceptance rate of the embedded dynamic weight model are increased by 2.2% and 10.88%, respectively. The dynamic weight model can better adapt to the dynamic changes of parking demand, so that parking resources can be fully utilized during peak hours. Compared with the static pricing model, the dynamic pricing mechanism was introduced to evenly distribute vehicles to each parking lot, and the equilibrium degree of parking area is reduced by 0.074 on average, so as to realize the balanced utilization of parking resources. The model can provide theoretical reference for parking allocation and management decision-making of shared parking platform and alleviate the problem of urban parking.
In order to study the characteristics and risks of lane-changing behaviors of large vehicles,trajectory data of large vehicles in the expressway merging area was collected based on drone shooting and image recognition technology,and lane-changing characteristics and spatiotemporal risks of large vehicles were analyzed.The results indicate that the average value of the lane change duration of large vehicles is 5.28s,the average value of the first half time is 2.60s,the average value of the last half time is 2.68s,and the average value of longitudinal lane change travel distance is 78.12 meters.They all obey Weibull Distribution,and are significantly related to lane-changing speed.The lane change duration and the first half time are significantly related to the distance between the large vehicle and the vehicle in front in the original lane and the distance between the large vehicle and the vehicle in front in the target lane.The first half time is also significantly related to the distance along the lane line.75.40% of large vehicles start to change lanes within 100 meters before the bottleneck section of the merging area,and the occurrence of lane-changing behavior spreads from the outer lane to the inner lane in turn.The ave-rage distance and relative speed between the large vehicle and the vehicle in front in the original lane are the smallest,which are 22.91 meters and -0.90m/s,respectively.If the lane change gap is small,the driver will be more inclined to change lane when the lane change gap shrinks slowly or continuously expands.The large vehicle has the highest risk of collision with the vehicle in front in the original lane,and approximately 15.32% of large vehicles change lanes when they are in an unsafe state with the vehicles in front.
In order to accurately identify the propagation path of recurrent congestion and analyze its propagation mechanism to alleviate the traffic congestion at the source and block the propagation path, this study proposed a method of analyzing the congestion propagation mechanism based on taxi GPS data. Firstly, the number of vehicle trajectories and travel speed were used to identify the traffic congestion area based on the space-time cube model of urban road network. According to the relative spatio-temporal stability of recurrent congestion, a time-section recognition method of recurrent traffic congestion grid was proposed. Secondly, the spatio-temporal congestion propagation trees was constructed. Aiming at the dynamics of traffic congestion propagation, a method of mining frequency-weighted recurrent propagation relation set was proposed to construct recurrent congestion propagation subtrees. Thirdly, the Dynamic Bayesian Network was introduced to obtain the congestion propagation probability through Bayesian estimation. Finally, taking the eastern section of the South Second Ring Road in Xi'an as an example, the proposed method was used to conduct an empirical analysis to explore the congestion propagation path and its probability. The research results show that based on the space-time cube model, the recurrent congestion grids in each time frame identified by the number of vehicle trajectories and travel speed lay the foundation for the accurate analysis of the congestion propagation mechanism. The congestion propagation trees constructed by using the STC algorithm, and the proposed frequent itemsets mining method considering temporal reproducibility characteristics of congestion propagation can be used to reconstruct the recurrent congestion propagation subtrees and clarify the propagation path of recurrent congestion. The possibility of congestion propagation between grids was analyzed based on the Dynamic Bayesian Network. It provides a theoretical basis for dynamically finding the key segment in the congestion propagation network, scientifically and reasonably formulating the congestion alleviation scheme and the task timeline.
A model for predicting the risks of pedestrian injuries after accidents based on clustering method and back-propagation neural network was proposed to study the factors that affect pedestrian injuries in car-pedestrian collision accidents.Firstly,the data of 372 car-pedestrian collision accidents between 2018 and 2019 in the National Vehicle Accident In-depth Investigation System(NAIS)database was collected as the research object.And it was statistically analyzed to obtain 9 accident characteristic parameters in three dimensions of vehicle,pedestrian and collision status.Then,combined with the characteristics of each accident,the K-means clustering method was selected for continuous eigenvalues,and the hierarchical clustering method was selected for discrete eigenvalues to obtain the correlation between pedestrian injury and death risks and various characteristic parameters.Finally,a BP neural network prediction model based on accident characteristics was established to predict pedestrian injuries and deaths.The test results show that the success rate of the pedestrian casualty risk prediction model is 86%.
With the continuous advancement and popularization of autonomous driving technology, more and more vehicles with autonomous driving technology will appear on the road, and the service objects of road markings will gradually transition from drivers to autonomous vehicles.On the one hand, the method of road markings condition assessment requires a lot of manpower to inspect, measure and evaluate; on the other hand, the evaluation index is based on biological vision research, which does not conform to the characteristics of automatic driving vehicles based on machine vision. To solve the above problems, this paper proposed a method of road markings condition assessment for autonomous vehicles. First, PSNR(peak signal-to-noise ratio) was initially determined as the evaluation index by means of literature review, analogical reasoning and logical reasoning. Secondly, to quickly obtain PSNR, this paper proposes a calculation method of the PSNR based on image inpainting, which utilizes the DeblurGAN model restores the damaged road markings at the image level, and then uses the damaged and restored road markings images to calculate the PSNR. In addition, this paper proposed a data augmentation method that can realis-tically synthesize damaged road markings images to improve the performance of image inpainting models. Then, the AlexNet network was used as the benchmark model to design experiments to study the relationship between the PSNR and the recognition accuracy of road markings. The experimental results show that, compared with the calculation method of the PSNR based on the artificially restored image, the average PSNR obtained by the method proposed in this paper only differs by about 2.24%, but the acquisition speed is increased by about 418 times; when the average PSNR differs by about 43.66%, the average recognition accuracy differs by about 36.27%. Therefore, the PSNR can measure the use of road markings. Compared with the evaluation method of the current standard, the evaluation method proposed in this paper improves the work efficiency by about 6.5 times and consumes less manpower. And it is more in line with the characteristics of self-driving cars, but the evaluation methods are more detailed in the specification.
 2022 Transportation Engineering
2022 Transportation Engineering
