
Journal of South China University of Technology(Natural Science) >
Vibration Control of Three-Flexible Beam Coupling System Based on Fuzzy Algorithm
Received date: 2025-03-10
Online published: 2025-05-26
Supported by
the National Natural Science Foundation of China(52175093);the Natural Science Foundation of Guangdong Province(2024A1515012070)
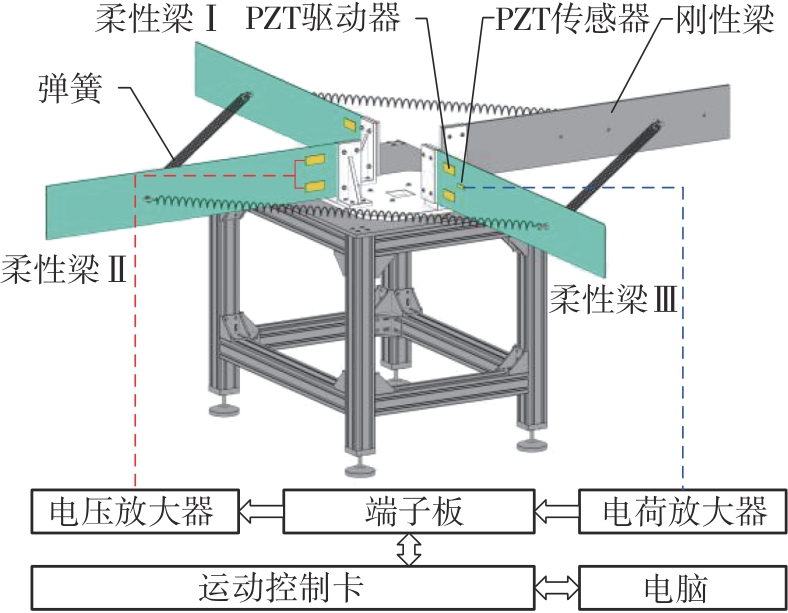
In the aerospace field, the rigid-flexible coupled structure is widely used due to its high structural efficiency. However, the existence of the rigid-flexible coupling effect poses a significant challenge to active vibration control. To address this issue, this paper takes the three-flexible beam coupling system as the research object and conducts active vibration control research. During the investigation, first, a vibration measurement and control platform for a three-flexible beam coupling system was established, and piezoelectric sensors and actuators were used to detect and suppress the vibration signals. Based on this, vibration measurement and control algorithm design were carried out. Subsequently, the system dynamics model was established by combining the finite element method with the Hamilton variational principle. The main modal shapes of the system’s free vibration in the simulation environment were determined, and the modal coordinates were introduced to obtain the state space equations of the system. At the same time, considering the uncertainty of model parameters, wavelet analysis and jump spider optimization algorithm were used to accurately identify the parameters of the system state space equations. In addition, considering the nonlinearity and parameter uncertainty of the system, a fuzzy logic controller based on Gaussian membership function was designed to suppress the vibration of the flexible beams. Simulated and experimental results show that, within the same control saturation voltage period, the fuzzy logic controller performs better than the large-gain PD (Proportional and Derivative) control in suppressing the vibration of the three-flexible beam coupling system. It can suppress the large-amplitude vibration quickly while suppressing the small-amplitude vibration at a faster speed, effectively shortening the time for the system to reach a stable state and significantly improving the vibration control effect. In summary, the fuzzy logic controller based on Gaussian membership function designed in this paper overcomes the nonlinearity and parameter uncertainty in the vibration control of rigid-flexible coupling structures, and shows stronger adaptability and higher control efficiency than the traditional large-gain PD control.
QIU Zhicheng , LI Meng , LI Min . Vibration Control of Three-Flexible Beam Coupling System Based on Fuzzy Algorithm[J]. Journal of South China University of Technology(Natural Science), 2026 , 54(1) : 104 -114 . DOI: 10.12141/j.issn.1000-565X.250060
| [1] | LI S, CHEN W, HU J,et al .Structural design and compression-bending test of ultra-lightweight carbon-fiber-reinforced polymer truss structures[J].Composite Structures,2023,313:116909/1-15. |
| [2] | LOMBARDI C, BEVILACQUA R .State space modeling and estimation of flexible structure using the theory of functional connections[J].Acta Astronautica,2024,219:693-709. |
| [3] | WANG Y, QIAN Y, WANG Y,et al .Flutter analysis of a rigid-flexible coupled composite space structure with momentum wheels under thermal load[J].Aerospace Science and Technology,2024,148:109114/1-16. |
| [4] | QIU Z, YANG Y, ZHANG X .Reinforcement learning vibration control of a multi-flexible beam coupling system[J].Aerospace Science and Technology,2022,129:107801/1-22. |
| [5] | ZHOU X, WANG H, WU K,et al .Nonlinear disturbance observer-based robust predefined time tracking and vibration suppression control for the rigid-flexible coupled robotic mechanisms with large beam-deformations[J].Computers and Mathematics with Applications,2023,148:1-25. |
| [6] | AI Q, WANG Q, LI J,et al .Research on dynamic modeling and distributed cooperative control method of dumbbell-shaped spacecraft[J].Journal of Vibration Engineering & Technologies,2023,12(3):3033-3049. |
| [7] | SALEM M A M, KASSEM M, AMIN M S,et al .Comparative analysis for optimal placement of piezoelectric actuators on smart thin plate[J].Mechanics Based Design of Structures and Machines,2025,53(1):548-573. |
| [8] | GAO Z, XU T, YU R,et al .Piezoelectric-based smart structures for aero-engine blade:piezoelectric layout optimization and vibration suppression tests[J].Aerospace Science and Technology,2024,153:109455/1-16. |
| [9] | HIZARCI B, KIRAL Z, SAHIN S .Optimal extended state observer based control for vibration reduction on a flexible cantilever beam with using air thrust actuator[J].Applied Acoustics,2022,197:108944/1-18. |
| [10] | BELHERAZEM A, SALIM R, LAIDANI A,et al .Vibration control of a two-link flexible manipulator[J].Automatic Control and Computer Sciences,2024,58(3):346-358. |
| [11] | WEI J, QIU Z, HAN J,et al .Experimental comparison research on active vibration control for flexible piezoelectric manipulator using fuzzy controller[J].Journal of Intelligent and Robotic Systems,2010,59(1):31-56. |
| [12] | DONG J, DUAN X .Robust control strategy of acoustic micro robots based on fuzzy system[J].Micromachines,2024,15(11):1403/1-16. |
| [13] | LIU P, TONG S .Fuzzy adaptive fault-tolerant control for underactuated wheeled mobile robot with prescribed performance[J].International Journal of Control,Automation and Systems,2024,22(6):1998-2006. |
| [14] | JENNAN N, MELLOULI E .Robust control for a drone quadrotor using fuzzy logic-based fast terminal sliding mode control[J].Journal of the Brazilian Society of Mechanical Sciences and Engineering,2024,46(7):432/1-13. |
| [15] | WU Q, LIN F, ZHAO H,et al .A deterministic robust control with parameter optimization for uncertain two-wheel driven mobile robot.[J].ISA transactions,2023,146:29-41. |
| [16] | QIU Z, YANG Y, ZHANG X .Heterogeneous reinforcement learning vibration control of coupling system with four flexible beams connected by springs[J].Mechatronics,2023,95:103063/1-20. |
| [17] | HERNAN P, ADRIAN P, RANJAN P,et al .A bio-inspired method for mathematical optimization inspired by Arachnida Salticidade[J].Mathematics,2021,10(1):102/1-12. |
| [18] | NASIBOGLU R, NASIBOV E .WABL method as a universal defuzzifier in the fuzzy gradient boosting regression model[J].Expert Systems with Applications,2023,212:118771/1-12. |
/
| 〈 |
|
〉 |