
Journal of South China University of Technology(Natural Science) >
Lane Line Detection Algorithm Based on Deep Learning
Received date: 2024-12-30
Online published: 2025-04-27
Supported by
the Key R & D Program of Heilongjiang Province(JD22A014);the National Natural Science Foundation of China(62173107)
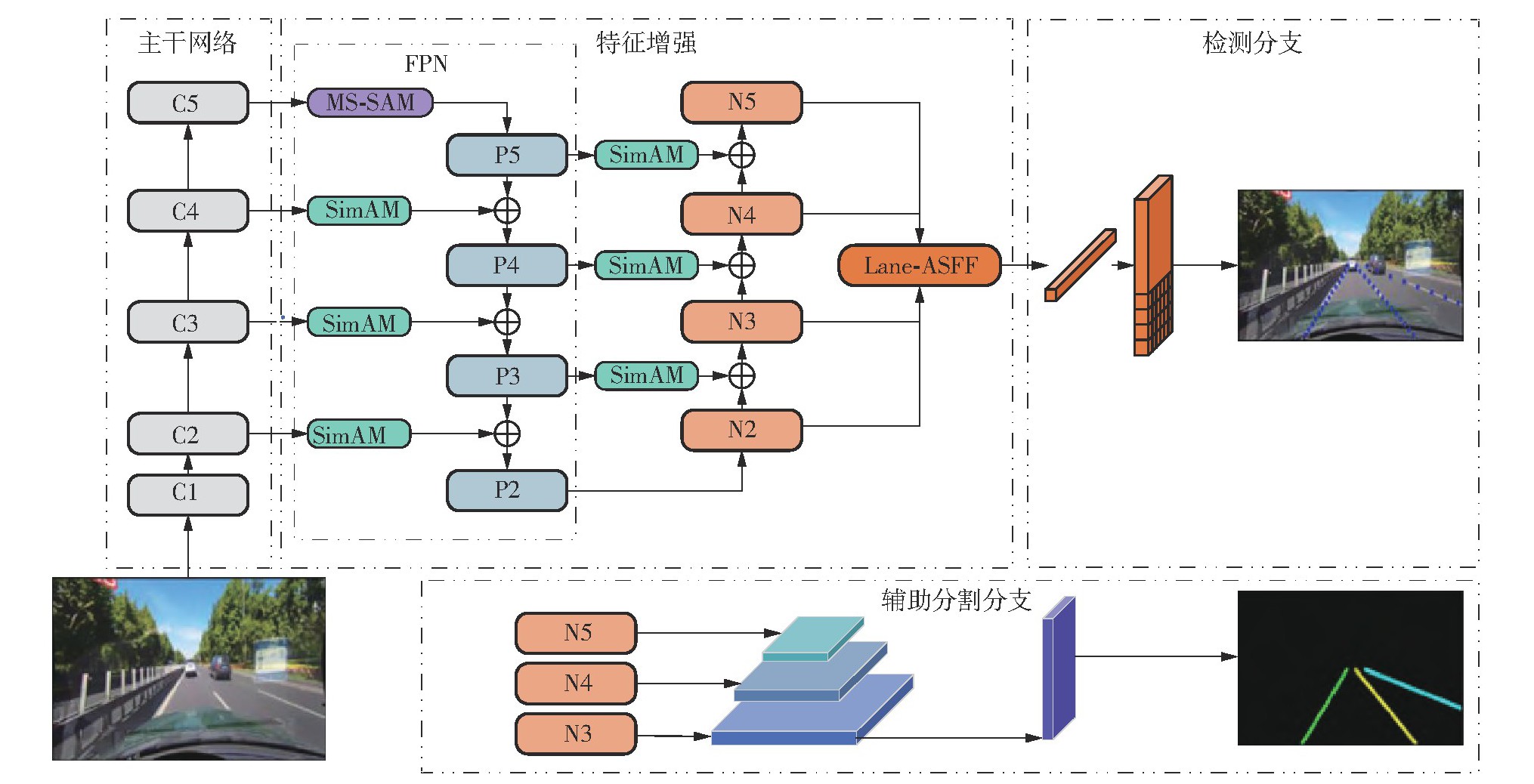
Aiming at the problem of lane detection accuracy of intelligent vehicles in complex scenes, this paper proposed a lane line detection algorithm which incorporates a multi-scale spatial attention mechanism and a path aggregation network (PANet). The algorithm first introduced the pre-anchored frame UFLD lane detection model and incorporated a feature pyramid enhancement module PANet with depthwise separable convolution to achieve multi-scale feature extraction of images. Next, a multi-scale spatial attention module was designed in the network framework and a SimAM lightweight attention mechanism was introduced to enhance the focusing ability on target features. Then, an adaptive feature fusion module was designed to perform cross-scale fusion of feature maps output from PANet by intelligently adjusting the fusion weights of feature maps at different scales, so as to effectively enhance the network’s ability to extract complex features. Finally, the application of TuSimple dataset detection proves that the proposed algorithm achieves a detection accuracy of 96.84%, representing a 1.02 percentage point improvement over the original algorithm, and outperforms conventional mainstream algorithms. Experimental results on the CULane dataset demonstrate that the proposed algorithm achieves an F1 score of 72.74%, outperfor-ming conventional mainstream methods with a 4.34 percentage point improvement over the baseline. Notably, it exhibits significant performance gains in extreme scenarios (e.g., strong illumination and shadows), confirming its superior detection capability in complex environments. In addition, the real-time test shows that the model infe-rence speed reaches 118 f/s, which meets the real-time demand of intelligent vehicles.
YUE Yongheng , ZHAO Zhihao . Lane Line Detection Algorithm Based on Deep Learning[J]. Journal of South China University of Technology(Natural Science), 2025 , 53(9) : 22 -30 . DOI: 10.12141/j.issn.1000-565X.240609
| [1] | HE Y, WANG H, ZHANG B .Color-based road detection in urban traffic scenes [J].IEEE Transactions on Intelligent Transportation Systems,2004,5(4):309-318. |
| [2] | YOO H, YANG U, SOHN K .Gradient-enhancing conversion for illumination-robust lane detection[J].IEEE Transactions on Intelligent Transportation Systems,2013,14(3):1083-1094. |
| [3] | GAIKWAD V, LOKHANDE S .Lane departure identification for advanced driver assistance [J].IEEE Tran-sactions on Intelligent Transportation Systems,2014,16(2):910-918. |
| [4] | NIU J, LU J, XU M,et al .Robust lane detection using two-stage feature extraction with curve fitting [J].Pattern Recognition,2016,59:225-233. |
| [5] | PAN X, SHI J, LUO P,et al .Spatial as deep:spatial CNN for traffic scene understanding[C]∥ Procee-dings of theThirty-Second AAAI Conference on Artificial Intelligence.New Orleans:AAAI,2018:7276-7283. |
| [6] | HOU Y, MA Z, LIU C,et al .Learning lightweight lane detection CNNs by self attention distillation[C]∥ Proceedings of 2019 IEEE/CVF International Conference on Computer Vision.Seoul:IEEE,2019:1013-1021. |
| [7] | ZHAO J, QIU Z, HU H,et al .HWLane:HW-Transformer for lane detection[J].IEEE Transactions on Intelligent Transportation Systems,2024,25(8):9321-9331. |
| [8] | NEVEN D, DE BRABANDERE B, GEORGOULIS S,et al .Towards end-to-end lane detection:an instance segmentation approach[C]∥ Proceedings of 2018 IEEE Intelligent Vehicles Symposium.Changshu:IEEE,2018:286-291. |
| [9] | WEN Y, YIN Y, RAN H .FlipNet:an attention-enhanced hierarchical feature flip fusion network for lane detection[J].IEEE Transactions on Intelligent Transportation Systems,2024,25(8):8741-8750. |
| [10] | TABELINI L, BERRIEL R, PAIXAO T M,et al .PolyLaneNet:lane estimation via deep polynomial regression[C]∥ Proceedings of 2020 the 25th Inter-national Conference on Pattern Recognition.Milan:IEEE,2021: 6150-6156. |
| [11] | LIU R, YUAN Z, LIU T,et al .End-to-end lane shape prediction with transformers[C]∥ Proceedings of 2021 IEEE Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2021:3693-3701. |
| [12] | FENG Z, GUO S, TAN X,et al .Rethinking efficient lane detection via curve modeling[C]∥ Procee-dings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:17041-17049. |
| [13] | YOO S, LEE H S, MYEONG H,et al .End-to-end lane marker detection via row-wise classification[C]∥ Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops.Sea-ttle:IEEE,2020:4335-4343. |
| [14] | QIN Z, WANG H, LI X .Ultra fast structure-aware deep lane detection[C]∥ Proceedings of the 16th European Conference on Computer Vision.Glasgow:Springer,2020:276-291. |
| [15] | LIU L, CHEN X, ZHU S,et al .CondLaneNet:a top-to-down lane detection framework based on conditional convolution[C]∥ Proceedings of 2021 IEEE/CVF International Conference on Computer Vision.Montreal:IEEE,2021:3753-3762. |
| [16] | LIU S, QI L, QIN H,et al .Path aggregation network for instance segmentation[C]∥ Proceedings of 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Salt Lake City:IEEE,2018:8759-8768. |
| [17] | YANG L, ZHANG R Y, LI L,et al .SimAM:a simple,parameter-free attention module for convolutional neural networks[C]∥ Proceedings of the 38th International Conference on Machine Learning.Wi-lliamstown:ML Research Press,2021:11863-11874. |
| [18] | HE K, ZHANG X, REN S,et al .Deep residual learning for image recognition[C]∥ Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition.Las Vegas:IEEE,2016:770-778. |
| [19] | LIN T Y, DOLLáR P, GIRSHICK R,et al .Feature pyramid networks for object detection[C]∥ Procee-dings of IEEE Conference on Computer Vision and Pattern Recognition.Honolulu:IEEE,2017:936-9442125. |
| [20] | CHOLLET F .Xception:deep learning with depthwise separable convolutions[C]∥ Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Re-cognition.Honolulu:IEEE,2017:1800-1807. |
| [21] | LIU S, HUANG D, WANG Y .Learning spatial fusion for single-shot object detection[EB/OL].(2019-11-21)[2024-12-10].. |
| [22] | CHEN L C, PAPANDREOU G, SCHROFF F,et al .Rethinking atrous convolution for semantic image segmentation[EB/OL].(2017-12-05)[2024-12-10].. |
| [23] | WANG Q, WU B, ZHU P,et al .ECA-Net:efficient channel attention for deep convolutional neural networks[C]∥ Proceedings of the IEEE/CVF confe-rence on computer vision and pattern recognition.Seattle:IEEE,2020:11531-11539. |
| [24] | TuSimple .TuSimple lane detection benchmark[EB/OL].(2017-7-17)[2024-12-10].. |
| [25] | TABELINI L, BERRIEL R, PAIX?O T M,et al .Keep your eyes on the lane:real-time attention-guided lane detection[C]∥ Proceedings of 2021 IEEE/CVF COnference on Computer Vision and Pattern Recognition.Nashville:IEEE,2021:294-302. |
| [26] | GHAFOORIAN M, NUGTEREN C, BAKA N,et al .EL-GAN:embedding loss driven generative adversarial networks for lane detection[C]∥ Proceedings of the 15th European Conference on Computer Vision Workshops.Munich:Springer,2018:256-272. |
| [27] | XU H, WANG S, CAI X,et al .CurveLane-NAS:unifying lane-sensitive architecture search and adaptive point blending[C]∥ Proceedings of the 16th European Conference on Computer Vision.Glasgow:Springer,2020:689-704. |
| [28] | WANG J, MA Y, HUANG S,et al .A keypoint-based global association network for lane detection [C]∥ Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:1382-1391. |
| [29] | HONDA H, UCHIDA Y .CLRerNet:improving confidence of lane detection with LaneIoU[C]∥ Procee-dings of 2024 IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2024:1165-1174. |
/
| 〈 |
|
〉 |