
Journal of South China University of Technology(Natural Science) >
Research on Intelligent Ballistic Trajectory Simulation Football Auxiliary Training Robot
Received date: 2024-12-18
Online published: 2025-03-27
Supported by
the National Natural Science Foundation of China(12272137)
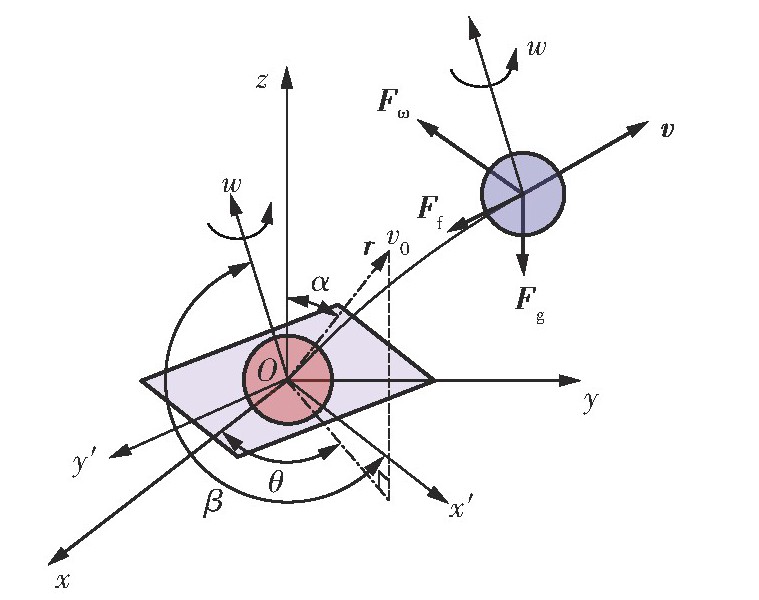
With the increasing awareness of health and the popularization of competitive sports, the technological advancement and specialization of ball sports training have become a growing trend. In football training, the precise simulation of ball trajectories and the design of personalized training programs have emerged as key issues that need to be addressed urgently. To enhance the scientific rigor and effectiveness of football training and to promote its intelligent development, this study proposed an omnidirectional mobile intelligent ballistics trajectory simulation football training assistant robot by integrating technologies such as ball launching mechanisms, visual acquisition, data analysis, and motion control. Firstly, a forward dynamics model of football was constructed. Subsequently, considering complex physical factors such as air resistance and the Magnus force, this study designed an inverse kinematics solution model based on the RMSProp algorithm to solve the initial parameters for ball shooting, enabling precise adjustments of the yaw and pitch angles according to the target position, thereby achieving high-precision hits on the target point. Finally, a three-axis gimbal shooting robot capable of adjusting the shooting angle and position was developed and tested experimentally. Experimental results indicate that the training robot achieves a goal entry error of less than 0.45 m under various training conditions. The root mean square error between the theoretical and actual trajectories is less than 7.5 cm. These findings validate the robustness and precision of the previously described inverse kinematics solution model for ball launching. Additionally, this study established a detailed ball launching dataset, which can serve as an important resource for subsequent research in data science and artificial intelligence.
WEI Zhengjun , LIANG Zijian , ZHENG Kun , CHEN Liang . Research on Intelligent Ballistic Trajectory Simulation Football Auxiliary Training Robot[J]. Journal of South China University of Technology(Natural Science), 2025 , 53(9) : 68 -75 . DOI: 10.12141/j.issn.1000-565X.240589
| [1] | MARTINS A .FCPortugal-machine learning for a flexible kicking robotic soccer skill[D].Porto:University of Porto,2023. |
| [2] | MAREW D, PERERA N, YU S,et al .A biomechanics-inspired approach to soccer kicking for humanoid robots[C]∥ Proceedings of 2024 IEEE-RAS the 23rd International Conference on Humanoid Robots.Nancy:IEEE,2024:722-729. |
| [3] | JI Y, LI Z, SUN Y,et al .Hierarchical reinforcement learning for precise soccer shooting skills using a quadrupedal robot [C]∥ Proceedings of 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems.Kyoto:IEEE,2022:1479-1486. |
| [4] | XU M, LIU B, ZHOU J,et al .Trajectory tracking of wheeled soccer robots based on model predictive control[C]∥ Proceedings of 2021 the 6th International Conference on Control and Robotics Engineering.Beijing:IEEE,2021:50-54. |
| [5] | JOUANDEAU N, HUGEL V .Optimization of parametrised kicking motion for humanoid soccer player[C]∥Proceedings of 2014 IEEE International Conference on Autonomous Robot Systems and Competitions. Espinho:IEEE,2014:241-246. |
| [6] | GHABUSSI A .Motion control and path planning and tracking algorithm of football robot[J].International Journal of Multimedia Computing,2020,1(1):15-30. |
| [7] | HU Y, WEN K, YU F .DexDribbler:learning dexterous soccer manipulation via dynamic supervision[C]∥Proceedings of 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems. Abu Dhabi:IEEE,2024:12910-12917. |
| [8] | PRIAMBUDI R A, WIBOWO I K, ARIYADI B N D,et al .Dynamic obstacle avoidance on middle size league robot soccer ERSOW using subtargets[C]∥ Proceedings of 2020 International Conference on Applied Science and Technology.Padang:IEEE,2020:479-485. |
| [9] | 姚道金,殷雄,罗真,等 .复杂环境下AGVS路径规划算法[J].华南理工大学学报(自然科学版),2023,51(11):56-62,139. |
| YAO Daojin, YIN Xiong, LUO Zhen,et al .AGVS path planning algorithm in complex environments[J].Journal of South China University of Technology(Natural Science Edition),2023,51(11):56-62,139. | |
| [10] | SMIT A .Scaling multi-agent reinforcement learning to eleven aside simulated robot soccer[D].Stellenbosch:Stellenbosch University,2022. |
| [11] | AZARKASB S O, KHASTEH S H .Eligibility traces in an autonomous soccer robot with obstacle avoidance and navigation policy[J].Applied Soft Computing,2024,164:111889/1-19. |
| [12] | VU A, SOREL A, FAURE C,et al .Visual tracking assessment in a soccer-specific virtual environment:a web-based study[J].PLoS ONE,2022,17(6):e0269643/1-21. |
| [13] | CHEN X, GAO P .Path planning and control of soccer robot based on genetic algorithm[J].Journal of Ambient Intelligence and Humanized Computing,2020,11:6177-6186. |
| [14] | REIS L P .Coordination and machine learning in multi-robot systems:applications in robotic soccer[EB/OL].(2023-12-26)[2024-10-05].. |
| [15] | HAARNOJA T, MORAN B, LEVER G,et al .Learning agile soccer skills for a bipedal robot with deep reinforcement learning[J].Science Robotics,2024,9:eadi8022/1-17. |
| [16] | LIU S, LEVER G, WANG Z,et al .From motor control to team play in simulated humanoid football[J].Science Robotics,2022,7: eabo0235/1-16. |
| [17] | TIRUMALA D, WULFMEIER M, MORAN B,et al .Learning robot soccer from egocentric vision with deep reinforcement learning [EB/OL].(2024-05-03)[2024-10-05].. |
| [18] | ASAI T, AKATSUKA T, HAAKE S .The physics of football[J].Physics World,1998,11(6):25-28. |
/
| 〈 |
|
〉 |