
Journal of South China University of Technology(Natural Science) >
Effect of Complex Horizontal Alignment Combination Design on the Trajectory Offset of Autonomous Vehicles Based on PreScan
Received date: 2024-12-20
Online published: 2025-03-03
Supported by
the National Natural Science Foundation of China(72471091);the Natural Science Foundation of Guangdong Province(2024A1515011177);the Science and Technology Plan Project of Guangdong Province(2024A1111120009)
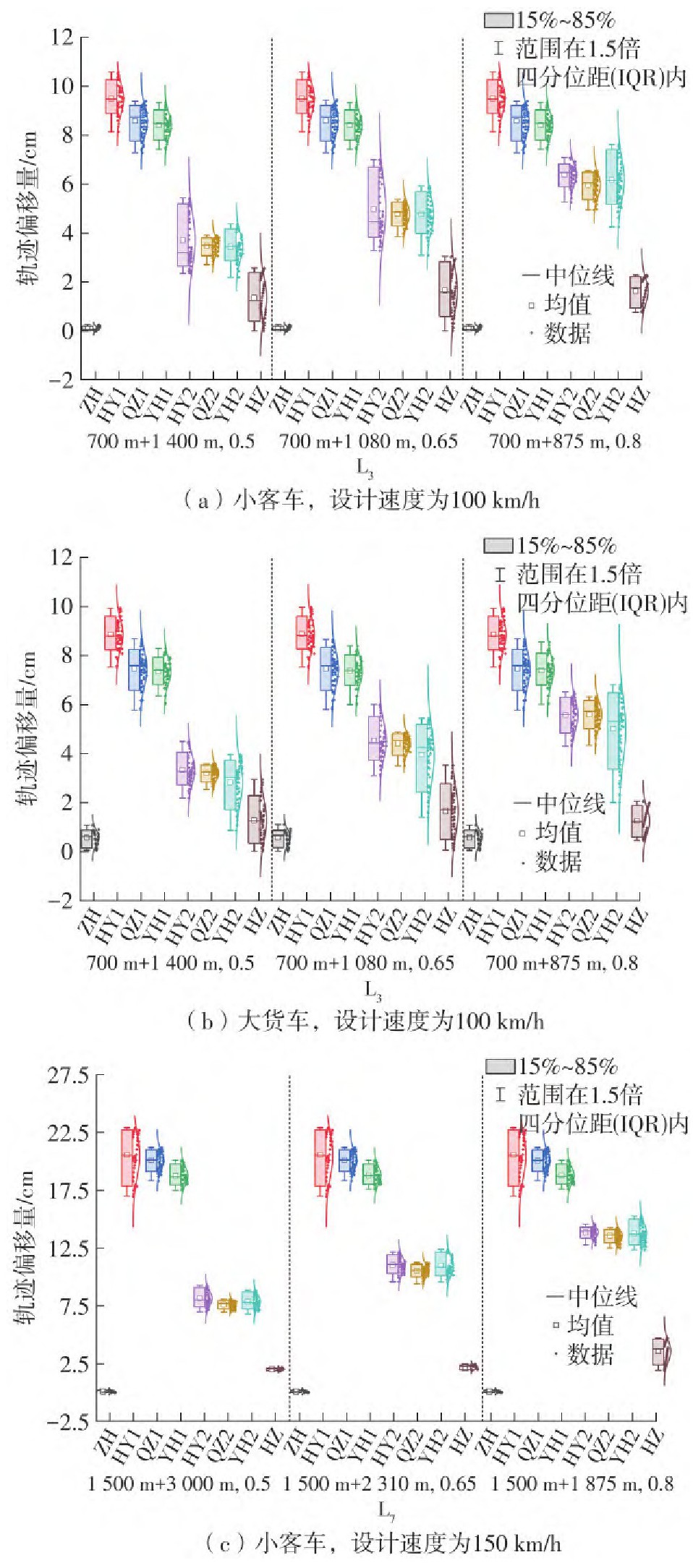
The penetration of automated vehicles (AVs) is expected to gradually increase in the future. Consequently, adding dedicated lanes for AVs to existing roads has become an effective countermeasure to improve traffic efficiency and driving safety. Although the horizontal and vertical alignment are constrained by human-driven vehicles and difficult to adjust, the width of Dedicated lanes for AVs can be redesigned and optimized. However, there is currently a lack of industry standards and calculation basis for designing such lanes. Vehicle trajectory deviation is a crucial factor in determining lane width. This study focuses on complex horizontal curve combinations that significantly affect driving trajectories. Using the PreScan-Simulink simulation platform, it applied typical AV lateral and longitudinal motion control algorithms and considered three types of complex horizontal curve combinations: oval, convex, and C-shaped. It constructed simulation vehicle models and road scenarios for different vehicle types and analyzed the impact of these complex curve combinations on AV trajectory deviation, ultimately developing trajectory deviation models for various vehicle types. This study shows that, unlike in convex curves where the maximum trajectory deviation occurs at the gentle transition point (HH point), in oval and C-shaped curves, the maximum deviation occurs at the first transition curve point (HY1 point). The design speed is significantly correlated with the trajectory offsets of AV on each horizontal alignment combination design: the offsets of the feature points with the largest offsets on each design are about 9~16 cm for AV at 60~130 km/h; the magnitude of the trajectory offsets varies greatly with the change in design speed, and the offsets of the feature points with the largest offsets on each horizontal alignment combination design are about 13~23 cm for AV at 140~150 km/h. Finally, a polynomial regression model was established to describe the relationship between design speed and trajectory deviation. The R2 of the model is greater than 0.95, so the model fit meets the prediction requirements. The research method and research results of this thesis can provide a reference basis for the calculation of dedicated lane width.
WANG Xiaofei , HUANG Shiqi , YAO Jiangbei , ZENG Qiang . Effect of Complex Horizontal Alignment Combination Design on the Trajectory Offset of Autonomous Vehicles Based on PreScan[J]. Journal of South China University of Technology(Natural Science), 2025 , 53(7) : 104 -115 . DOI: 10.12141/j.issn.1000-565X.240590
| [1] | 王之中,余荣杰,来飞,等 .国家自然科学基金委员会交通与运载工程学科2023年度管理工作综述[J].交通运输工程学报,2024,24(1):1-8. |
| WANG Zhizhong, YU Rongjie, LAI Fei,et al .Review on management of transportation and vehicle engineering discipline of NSFC in 2023[J].Journal of Tra-ffic and Transportation Engineering,2024,24(1):1-8. | |
| [2] | 李升波,刘畅,殷玉明,等 .汽车端到端自动驾驶系统的关键技术与发展趋势[J].人工智能,2023(5):1-16. |
| LI Shengbo, LIU Chang, YIN Yuming,et al .Key technologies and development trends of end-to-end automated driving systems for autonomous vehicles[J].Artificial Intelligence View,2023(5):1-16. | |
| [3] | 袁佩君 .自动驾驶汽车交通肇事的归责困境及刑法应对[J].华南理工大学学报(社会科学版),2023,25(2):30-40 |
| YUAN Peijun .The dilemma of attributing responsibility to traffic accidents caused by self-driving cars and the countermeasures of criminal law[J].Journal of South China University of Technology (Social Science Edition),2023,25(2):30-40 | |
| [4] | LIU Yuyan, TIGHT M, SUN Quanxin,et al .A systematic review:road infrastructure requirement for connected and autonomous vehicles (CAVs)[J].Journal of Physics:Conference Series,2019,1187(4):42-73. |
| [5] | 何永明,邢婉钰,魏堃,等 .超高速公路自动驾驶车辆换道轨迹规划策略[J].华南理工大学学报(自然科学版),2024,52(4):104-113 |
| HE Yongming, XING Wanyu, WEI Kun,et al .Lane-changing trajectory planning strategy for autonomous vehicles on superhighways[J].Journal of South China University of Technology (Natural Science Edition),2024,52(4):104-113. | |
| [6] | 徐进,陈钦,陈正委,等 .适应无人驾驶汽车的道路设施设计综述[J].西南交通大学学报,2023,58(6):1366-1377. |
| XU Jin, CHEN Qin, CHEN Zhengwei,et al .Review of roadway facility design for self-driving cars[J].Journal of Southwest Jiaotong University,2023,58(6):1366-1377. | |
| [7] | LIU Zhaocai, SONG Ziqi .Strategic planning of dedicated autonomous vehicle lanes and autonomous vehicle/toll lanes in transportation networks[J].Transportation Research Part C:Emerging Technologies,2019,10:381-403. |
| [8] | CHEN Zhibin, HE Fang, ZHANG Lihui,et al .Optimal deployment of autonomous vehicle lanes with endogenous market penetration[J].Transportation Research Part C:Emerging Technologies,2016,72:143-156. |
| [9] | LIU Hao, KAN Xingan, SHLADOVER S E,et al .Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities[J].Transportation Research Part C:Emerging Technologies,2018,95:261-279. |
| [10] | 姚志洪,郝慧君,巫雪梅,等 .考虑自动驾驶的混合交通流路段阻抗函数[J].交通运输工程与信息学报,2021,19(4):1-12. |
| YAO Zhihong, HAO Huijun, WU Xuemei,et al .Cost function of mixed traffic flow with autonomous driving[J].Journal of Transportation Engineering and Information,2021,19(4):1-12. | |
| [11] | 常鑫,李海舰,荣建,等 .混有网联车队的高速公路通行能力分析[J].华南理工大学学报(自然科学版),2020,48(4):142-148. |
| CHANG Xin, LI Haijian, RONG Jian,et al .Analysis of capacity for mixed traffic flow with connected vehicle platoon on freeway[J].Journal of South China University of Technology (Natural Science Edition),2020,48(4):142-148. | |
| [12] | 公路工程技术标准: [S]. |
| [13] | 公路路线设计规范: [S]. |
| [14] | OTHMAN K .Impact of autonomous vehicles on the physical infrastructure:changes and challenges[J].Designs,2021,5(3):40. |
| [15] | GARCíA A, CAMACHO-TORREGROSA F J .Influence of lane width on semi- autonomous vehicle performance[J].Transportation Research Record,2020,2674(9):279-286. |
| [16] | HU Hongyu, GAO Zhenhai, YU Ziwen,et al .An experimental driving simulator study of unintentional lane departure[J].Advances In Mechanical Engineering,2017,9(10):1-8. |
| [17] | RAJU N, KUMAR P, JAIN A,et al .Application of trajectory data for investigating vehicle behavior in mixed traffic environment[J].Transportation Research Record,2018,2672(43):122-133. |
| [18] | GHASEMZADEH A, AHMED M M .Utilizing naturalistic driving data for in-depth analysis of driver lane-keeping behavior in rain:non-parametric MARS and parametric logistic regression modeling approaches[J].Transportation Research Part C-Emerging Technologies,2018,90:379-392. |
| [19] | CHANG Xin, LI Haijian, RONG Jian,et al .Determining the appropriate lane width at urban signalised intersections-a case study in Beijing[J].IET Intelligent Transport Systems,2019,13(12):1785-1791. |
| [20] | DING Rui, PAN Cunshu, DAI Zhenhua,et al .Lateral oscillation characteristics of vehicle trajectories on the straight sections of freeways[J].Applied Sciences,2022,12(22):11498. |
| [21] | 庄稼丰,李正军,丁瑞,等 .高速公路车辆轨迹摆动特征与小客车道宽度研究[J].交通运输系统工程与信息,2023,23(1):324-336. |
| ZHUANG Jiafeng, LI Zhengjun, DING Rui,et al .Vehicles trajectory oscillation characteristics and passenger cars’ lane width for freeways[J].Journal of Transportation Systems Engineering and Information Technology,2023,23(1):324-336. | |
| [22] | CAI Guoshun, XU Liwei, LIU Ying,et al .Robust preview path tracking control of autonomous vehicles under time-varying system delays and saturation[J].IEEE Transactions on Vehicular Technology,2023,72(7):8486-99. |
| [23] | WEIGEL H, LINDNER P, WANIELIK G .Vehicle tracking with lane assignment by camera and lidar sensor fusion[C]∥ Proceeding of the 2009 IEEE Intelligent Vehicles Symposium.Xi’an:IEEE,2009:513-520. |
| [24] | Hillel A BAR, LERNER R, LEVI D,et al .Recent progress in road and lane detection:a survey[J].Machine Vision and Applications 2014,25:727-745. |
| [25] | LIU Xin, XU Xin, DAI Bin .Vision-based long-distance lane perception and front vehicle location for full autonomous vehicles on highway roads[J].Journal of Central South University,2012,19(5):1454-1465. |
| [26] | LIU Ruijin, YUAN Zejian, LIU Tie, al et,End-to-end lane shape prediction with transformers[C]∥ Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2021:3694-3702. |
| [27] | WANG Yue, TEOH E K, SHEN Dinggang .Lane detection and tracking using B-Snake[J].Image and Vision Computing,2004,22(4):269-280. |
| [28] | 赵祥模国家重点研发计划( 2021 YFB2501200)团队.自动驾驶测试与评价技术研究进展[J].交通运输工程学报,2023,23(6):10-77. |
| ZHAO Xiang mo’s Team Supported by the National Key Research and Development Program of China (2021 YFB2501200).Research progress in testing and evaluation technologies for autonomous driving[J].Journal of Traffic and Transportation Engineering,2023,23(6):10-77. | |
| [29] | 王晓飞,申天杰,郭月利,等 .基于PreScan的自动驾驶小客车弯坡段轨迹偏移研究[C]∥ 2024世界交通运输大会(WTC2024)论文集(公路工程).北京:人民交通出版社,2024:7. |
| [30] | 华南理工大学 .一种自动驾驶专用车道的高速公路横断面设计方法及系统:CN202410534960.X[P].2024-08-16. |
| [31] | 孙福昌,邵金菊,单少飞,等 .适应道路曲率多变的前馈-预测LQR横向控制[J].重庆理工大学学报(自然科学),2024,38(2):45-54. |
| SUN Fuchang, SHAO Jinju, SHAN Shaofei,et al .Feed-forward predictive LQR lateral control adapted to variable road curvature[J].Journal of Chongqing University of Technology (Natural Science),2024,38(2):45-54. | |
| [32] | 王文涛 .面向车道居中的转向驾驶权切换控制研究[D].长春:吉林大学,2023. |
| [33] | 贾立新,林秀锐,倪洪杰,等 .基于紧约束鲁棒模型预测控制的无人车辆轨迹跟踪控制[J].高技术通讯,2024,34(3):275-281. |
| JIA Lixin, LIN Xiurui, NI Hongjie,et al .Trajectory tracking control of unmanned vehicles based on tight constrained robust model predictive control[J].Chinese High Technology Letters,2024,34(3):275-281. | |
| [34] | 李学慧,苏振,张俊友 .多参数优化MPC的自动驾驶轨迹跟踪控制[J].重庆理工大学学报(自然科学),2024,38(2):55-64. |
| LI Xuehui, SU Zhen, ZHANG Junyou .Research on autonomous driving trajectory tracking control by multi-parameter optimization MPC[J].Journal of Chongqing University of Technology (Natural Science),2024,38(2):55-64. |
/
| 〈 |
|
〉 |