
Research on Redundant Strapdown Inertial Navigation Information Fusion for eVTOL Aircraft
Received date: 2023-11-06
Online published: 2024-03-22
Supported by
the National Natural Science Foundation of China for Youths(52105148)
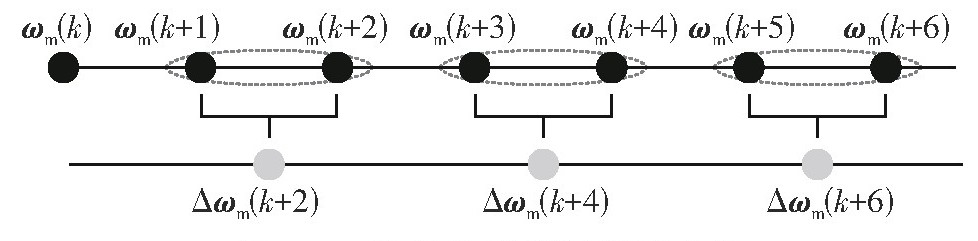
As a potential solution for future urban transportation, the using of electric vertical takeoff and landing (eVTOL) aircraft, has great potential to alleviate urban traffic congestion and improve air traffic efficiency. In its commonly used navigation systems, integrated navigation and sensor redundancy technology are usually used to improve system reliability and safety. However, in the current sensor redundancy technology of navigation systems, redundant sensors only serve as data backup, resulting in insufficient information utilization of measurement data. To address this issue, this paper took the integrated navigation system of a triple redundant strapdown inertial navigation system (SINS) and a global navigation satellite system (GNSS) as the research object and proposed a real-time estimation method for gyroscope noise based on second-order differencing and redundant information of the inertial measurement unit (IMU). It derived recursive expressions for gyroscope noise estimation in the case of two and three redundancies. After obtaining the estimated noise value of the gyroscope, the navigation information of SINS and GNSS was fused to improve the accuracy and robustness of the integrated navigation system. Through simulation and real sports car tests on the SINS/GNSS integrated navigation system, the results show that the method proposed in this paper can accurately estimate gyroscope noise. Compared with traditional fusion methods, the navigation accuracy and anti-interference ability of the combined navigation system are improved after introducing the real-time estimation of gyroscope noise, which has practical engineering significance.
HU Qingchun , HUANG Si , CHEN Xingbin , ZHANG Ning , SU Qingpeng . Research on Redundant Strapdown Inertial Navigation Information Fusion for eVTOL Aircraft[J]. Journal of South China University of Technology(Natural Science), 2024 , 52(10) : 1 -8 . DOI: 10.12141/j.issn.1000-565X.230696
| 1 | ZAID A A, BELMEKKI B E Y, ALOUINI M S . eVTOL communications and networking in UAM:requirements,key enablers,and challenges[J]. IEEE Communications Magazine, 2023, 61( 8): 154- 160. |
| 2 | 廖小罕, 屈文秋, 徐晨晨, 等 . 城市空中交通及其新型基础设施低空公共航路研究综述[J]. 航空学报, 2023, 44( 24): 28521/1- 26. |
| LIAO Xiaohan, QU Wenqiu, XU Chenchen, et al . A review of urban air mobility and its new infrastructure low-altitude public routes[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44( 24): 28521/1- 26. | |
| 3 | GARROW L A, GERMAN B J, LEONARD C E . Urban air mobility:a comprehensive review and comparative analysis with autonomous and electric ground transportation for informing future research[J]. Transportation Research Part C:Emerging Technologies, 2021, 132: 103377/1- 31. |
| 4 | 刘巨江, 谭郁松 . 基于安全性的电动垂直起降飞行器飞控系统架构设计[J]. 重庆大学学报, 2024, 47( 5): 67- 75. |
| LIU Jujiang, TAN Yusong . Architecture design of flight control system for electric vertical takeoff and landing aircraft based on safety analysis[J]. Journal of Chongqing University, 2024, 47( 5): 67- 75. | |
| 5 | ATIA M M, WASLANDER S L . Map-aided adaptive GNSS/IMU sensor fusion scheme for robust urban navigation[J]. Measurement, 2019, 131: 615- 627. |
| 6 | 向民志, 柴洪洲, 黄紫如, 等 . 附加TDCP约束的无人船载GNSS/MEMS组合导航方法[J]. 中国惯性技术学报, 2023, 31( 4): 366- 374. |
| XIANG Minzhi, CHAI Hongzhou, HUANG Ziru, et al . GNSS/MEMS integrated navigation method for unmanned surface vehicle with TDCP constraints[J]. Journal of Chinese Inertial Technology, 2023, 31( 4): 366- 374. | |
| 7 | DU B, SHI Z, SONG J, et al . A fault-tolerant data fusion method of MEMS redundant gyro system based on weighted distributed Kalman filtering[J]. Micromachines, 2019, 10( 5): 278/1- 20. |
| 8 | TORENS C, VOLKERT A, BECKER D, et al . HorizonUAM:safety and security considerations for urban air mobility[C]∥ Proceedings of AIAA Aviation 2021 Forum. Reston: AIAA, 2021: 3199/1- 13. |
| 9 | 乔文超, 王红雨, 王鸿东 . 基于BP神经网络的无人机IMU多传感器冗余的补偿算法[J]. 电子测量与仪器学报, 2020, 34( 12): 19- 28. |
| QIAO Wenchao, WANG Hongyu, WANG Hongdong . Compensation algorithm for UAV IMU multi-sensor redundancy based on BP neural network[J]. Journal of Electronic Measurement and Instrument, 2020, 34( 12): 19- 28. | |
| 10 | WANG S, ZHAN X, ZHAI Y, et al . Enhancing navigation integrity for urban air mobility with redundant inertial sensors[J]. Aerospace Science and Technology, 2022, 126: 107631/1- 13. |
| 11 | HUANG H, ZHANG H, JIANG L . An optimal fusion method of multiple inertial measurement units based on measurement noise variance estimation[J]. IEEE Sensors Journal, 2023, 23( 3): 2693- 2706. |
| 12 | PATEL U N, FARUQUE I A . Multi-IMU based alternate navigation frameworks:performance & comparison for UAS[J]. IEEE Access, 2022, 10: 17565- 17577. |
| 13 | PATEL U N, FARUQUE I A . Sensor fusion to improve state estimate accuracy using multiple inertial measurement units[C]∥ Proceedings of 2021 IEEE International Symposium on Inertial Sensors and Systems. Kailua-Kona: IEEE, 2021: 9430484/1- 4. |
| 14 | 马龙, 刘宇哲, 代超璠, 等 . 组网冗余MEMS惯性传感器网络优化配置与融合处理方法[J]. 系统工程与电子技术, 2020, 42( 11): 2591- 2599. |
| MA Long, LIU Yuzhe, DAI Chaofan, et al . Networking redundant MEMS inertial sensor network optimal configuration and fusion processing method[J]. Systems Engineering and Electronics, 2020, 42( 11): 2591- 2599. | |
| 15 | FAIZULLIN M, FERRER G . Best axes composition extended:multiple gyroscopes and accelerometers data fusion to reduce systematic error[J]. Robotics and Autonomous Systems, 2023, 160: 104316/1- 9. |
| 16 | 严恭敏, 翁浚 . 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. |
| 17 | 严恭敏, 邓瑀 . 传统组合导航中的实用Kalman滤波技术评述[J]. 导航定位与授时, 2020, 7( 2): 50- 64. |
| YAN Gong-min, DENG Yu . Review on practical Kalman filtering techniques in traditional integrated navigation system[J]. Navigation Positioning and Timing, 2020, 7( 2): 50- 64. | |
| 18 | TANG H, ZHANG T, NIU X, et al . Impact of the Earth rotation compensation on MEMS-IMU preintegration of factor graph optimization[J]. IEEE Sensors Journal, 2022, 22( 17): 17194- 17204. |
/
| 〈 |
|
〉 |