
Journal of South China University of Technology(Natural Science) >
Research on the Construction and Evaluation Methods of the Perceptual Space of Unmanned Vehicles
Received date: 2023-12-19
Online published: 2024-03-05
Supported by
the Natural Science Foundation of Guangdong Province(2022A1515011974)
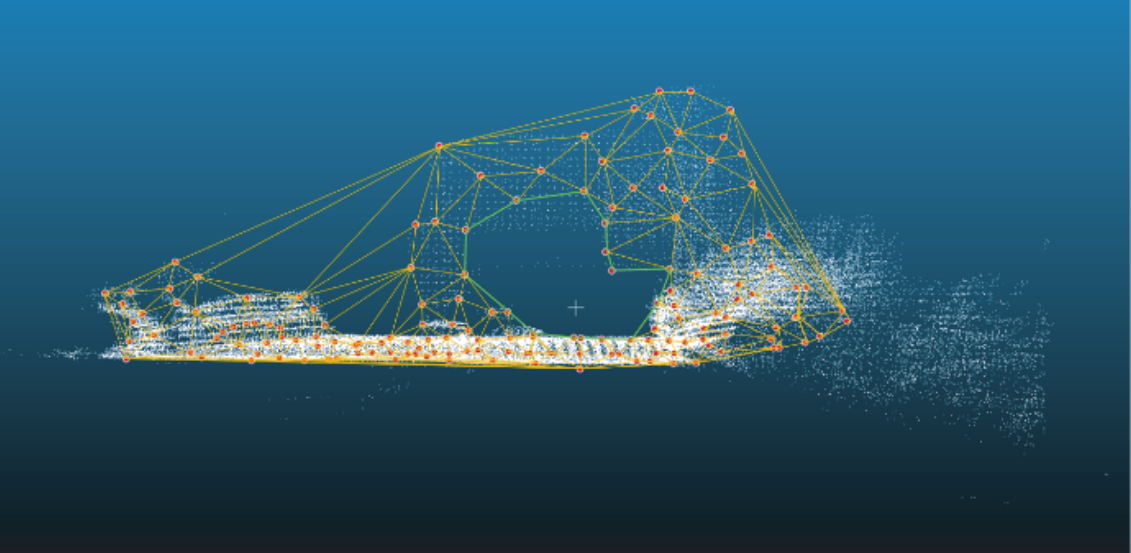
The sensor of unmanned vehicles replaces human eyes to perceive the information of road space is an important prerequisite for the safe operation of unmanned vehicles. Therefore, based on the domestic and international research literature research as well as the analysis of relevant software and hardware technologies, this paper analyzed the limitations of the current perception technology of unmanned vehicles, including the recognition range and characteristics of sensors such as LiDAR, camera and millimeter-wave radar. And it collected the real information of the road by using the LiDAR and the combination of navigation system, and further constructed the three-dimensional perception space of the unmanned vehicle with the collected point cloud data, the localization information, and the synchronous positioning and modeling algorithms, which realize the three-dimensional digital model construction of the road. At the same time, the mathematical expression model construction of parameters such as ranging ability, horizontal field of view angle and vertical field of view angle was carried out in the 3D point cloud map, and the spatial coordinate transformation method was utilized to separate the 3D point cloud data within the recognition range of the sensors and convert them to a unified coordinate system. Finally, the Delaunay triangulation method was used to construct a 3D model that can reflect the characteristics of perceptual space, so as to realize the perceptability of 3D perceptual space. In order to verify the practicality and accuracy of this method, this paper tested the algorithm using data collected in the field. The test results show that the method proposed in this paper has good robustness and it can work stably in complex road environments and accurately assess the perceptibility of unmanned vehicles. This research result not only provides a scientific basis for the road design and safety assessment of unmanned vehicles, but also provides strong technical support for the further development and application of unmanned technology.
Key words: unmanned vehicle; laser radar; perceptual space; road safety
WANG Xiaofei , WANG Ziqi , DING Zhenzhong , GUO Yueli , YAO Jiangbei . Research on the Construction and Evaluation Methods of the Perceptual Space of Unmanned Vehicles[J]. Journal of South China University of Technology(Natural Science), 2024 , 52(11) : 134 -140 . DOI: 10.12141/j.issn.1000-565X.230777
| 1 | 梁景盛,麻博文,孙刚禹,等 .基于Bow-Tie模型的交通事故分析[J].建模与仿真,2022,11(4):1151-1160. |
| LIANG Jingsheng, MA Bowen, SUN Gangyu,et al .Traffic accident analysis based on Bow-Tie model[J].Modeling and Simulation,2022,11(4):1151-1160. | |
| 2 | ZHENG O, ABDEL-ATY M, WANG Z,et al .AVOID:autonomous vehicle operation incident dataset across the globe[J].arXiv preprint arXiv:2303.12889,2023. |
| 3 | LI B, ZHANG T, XIA T .Vehicle detection from 3D lidar using fully convolutional network[J].arXiv preprint arXiv:1608.07916,2016. |
| 4 | ZHOU Y, TUZEL O .Voxelnet:end-to-end learning for point cloud based 3D object detection[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Salt Lake City:IEEE,2018:4490-4499. |
| 5 | YANG Z, SUN Y, LIU S,et al .3DSSD:point-based 3D single stage object detector[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2020:11040-11048. |
| 6 | CHEN Y, LIU S, SHEN X,et al .Fast point R-CNN[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision.Seoul:IEEE,2019:9775-9784. |
| 7 | GUAN H, LI J, CAO S,et al .Use of mobile LiDAR in road information inventory:a review[J].International Journal of Image and Data Fusion,2016,7(3):219-242. |
| 8 | JUNG J, OLSEN M J, HURWITZ D S,et al .3D virtual intersection sight distance analysis using lidar data[J].Transportation Research Part C:Emerging Technologies,2018,86:563-579. |
| 9 | GONZáLEZ-GóMEZ K, IGLESIAS L, RODRíGUEZ-SOLANO R,et al .Framework for 3D point cloud modelling aimed at road sight distance estimations[J].Remote Sensing,2019,11(23):2730/1-14. |
| 10 | LIOI A, de SANTOS-BERBEL C, BASSANI M,et al .3D modeling of highway guardrails for sight distance assessment[J].Journal of Transportation Engineering,Part A:Systems,2021,147(11):04021078/1-9. |
| 11 | 林泓熠,刘洋,李深,等 .车路协同系统关键技术研究进展[J].华南理工大学学报(自然科学版),2023,51(10):46-67. |
| LIN Hongyi, LIU Yang, LI Shen,et al .Research progress on key technologies in the cooperative vehicle infrastructure system[J].Journal of South China University of Technology(Natural Science Edition),2023,51(10):46-67. | |
| 12 | 华为终端有限公司 .问界 M9 参数配置表[EB/OL].(2023-11-24)[2024-02-26].. |
| 13 | 广州小鹏汽车科技有限公司 .P7 I配置表[EB/OL].(2023-11-6)[2024-02-26].. |
| 14 | TESLA.Model S车主手册[EB/OL].(2023-3-28)[2024-02-26].. |
| 15 | 张大印 .自动驾驶车载激光雷达关键技术研究[D].成都:电子科技大学,2019. |
| 16 | :公路路线设计规范 [S]. |
| 17 | WOOD D P .Safety and the car size effect:a fundamental explanation[J].Accident Analysis & Prevention,1997,29(2):139-151. |
| 18 | 安晓亚,朱余德,晏雄锋 .卷积神经网络支持下的建筑物选取方法[J].测绘学报,2023,52(9):1574-1583. |
| AN Xiaoya, ZHU Yude, YAN Xiongfeng .A building selection method supported by graphconvolutional network[J].Acta Geodaetica et Cartographica Sinica,2023,52(9):1574-1583. |
/
| 〈 |
|
〉 |