
Journal of South China University of Technology(Natural Science) >
Trajectory Friction Compensation Algorithm for Robots Based on Velocity Control
Received date: 2023-05-31
Online published: 2023-11-06
Supported by
the Key R&D Program of Hubei Province(2021BAA197)
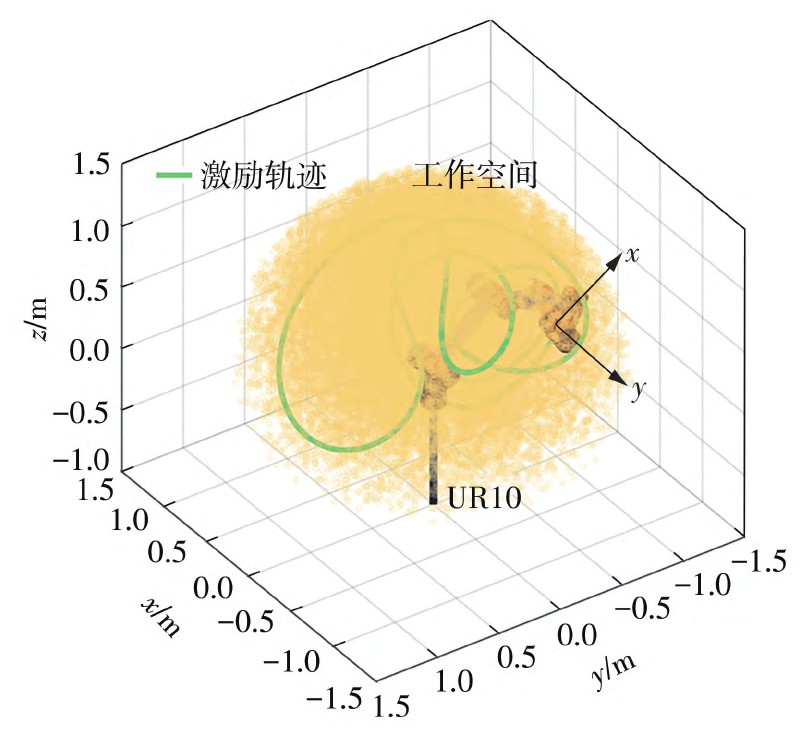
Currently, robots are extensively utilized in industrial manufacturing. However, due to the influence of joint friction and other factors in the robot system, the robot trajectory tracking accuracy is difficult to meet the requirements of high-precision production. In this study, a friction compensation control algorithm in speed mode was proposed to mitigate the impact of non-linear friction factors in the mechanical structure and unmodelled disturbances on the robot’s operational stability and machining precision. The optimal excitation trajectory was designed by a combination of Fourier series and fifth-order polynomial. Dynamic parameters were then pre-identified by the least squares method and iteratively optimized through the Levenberg-Marquardt method to establish a more precise robot dynamic model. Subsequently, the Lyapunov method was adopted to design the trajectory tracking control algorithm, and the joint angles collected in the steepest discrete tracking differentiator were fed into the control algorithm to calculate the real-time compensation. The compensation value was then applied in the robot, which effectively achieving friction compensation. The proposed algorithm was validated by employing a six-degree-of-freedom serial robot as an experimental subject. The results demonstrate that the trajectory tracking error is reduced by approximately 35%, as comparing with that under the non-compensation conditions, which confirms the efficacy of the algorithm in the realm of robot friction compensation.
YE Bosheng, LI Siao, TAN Shuai, et al . Trajectory Friction Compensation Algorithm for Robots Based on Velocity Control[J]. Journal of South China University of Technology(Natural Science), 2024 , 52(4) : 51 -58 . DOI: 10.12141/j.issn.1000-565X.230368
| 1 | BHATT P M, MALHAN R K, RAJENDRAN P,et al .Trajectory-dependent compensation scheme to reduce manipulator execution errors for manufacturing applications [C]∥ Proceedings of the ASME 2021 16th International Manufacturing Science and Engineering Conference.Ohio:American Society of Mechanical Engineers,2021:V001T05A009/1-10. |
| 2 | 曾培江 .机器人系统的摩擦补偿控制方法研究[D].成都:西华大学,2022. |
| 3 | MARQUES F, FLORES P, CLARO J C P,et al .Modeling and analysis of friction including rolling effects in multibody dynamics:a review[J].Multibody System Dynamics,2019,45:223-244. |
| 4 | XIAO B, YIN S, KAYNAK O,et al .Observer-based control for robotic manipulations with uncertain kinematics and dynamics[C]∥ Proceedings of 2016 IEEE the 14th International Workshop on Advanced Motion Control.New Zealand:IEEE,2016:282-288. |
| 5 | 魏琼,焦宗夏,王君,等 .基于LuGre模型的气动位置伺服系统摩擦补偿控制[J].机械工程学报,2018,54(20):131-138. |
| WEI Qiong, JIAO Zongxia, WANG Jun,et al .Control of pneumatic position servo with LuGre model-based friction compensation[J].Journal of Mechanical Engineering,2018,54(20):131-138. | |
| 6 | 李俊阳,赵琛,夏雨,等 .基于改进LuGre摩擦模型的机器人关节模糊自适应反步控制[J].湖南大学学报(自然科学版),2022,49(10):147-156. |
| LI Junyang, ZHAO Chen, XIA Yu,et al .Adaptive fuzzy backstepping control for robot joint based on modified LuGre friction model[J].Journal of Hunan University (Natural Sciences),2022,49(10):147-156. | |
| 7 | WANG S, CHEN Q, REN X,et al .Neural network-based adaptive funnel sliding mode control for servo mechanisms with friction compensation[J].Neurocomputing,2020,377:16-26. |
| 8 | ZHOU Z, WU B .Adaptive sliding mode control of manipulators based on fuzzy random vector function links for friction compensation[J].Optik,2021,27:166055/1-14. |
| 9 | 王军晓,闫小东,徐建明 .基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制[J].控制理论与应用,2023,40(7):1199-1207. |
| WANG Jun-xiao, YAN Xiao-dong, XU Jian-ming .Nonsingular fast terminal-sliding-mode control for flexible manipulator system based on disturbance and friction compensation[J].Control Theory & Application,2023,40(7):1199-1207. | |
| 10 | 李刚,李锋,丁孺琦,等 .基于关节力矩补偿的液压机械臂末端力软测量[J].华南理工大学学报(自然科学版),2022,50(10):140-152. |
| LI Gang, LI Feng, DING Ruqi,et al .Terminal force soft sensing of hydraulic manipulator based on joint torque compensation[J].Journal of South China University of Technology (Natural Science Edition),2022,50(10):140-152. | |
| 11 | 耿令波,陈柏,吴洪涛 .基于连接组合体方法的关节机器人动力学参数辨识[J].中国机械工程,2014,25(5):581-587. |
| GENG Lingbo, CHEN Bai, WU Hongtao .Identification of articulated robots’ dynamics parameters based on linkage-assemblies method[J].Chinese Journal of Mechanical Engineering,2014,25(5):581-587. | |
| 12 | YANG C, JIANG Y, HE W,et al .Adaptive parameter estimation and control design for robot manipulators with finite-time convergence[J].IEEE Transactions on Industrial Electronics,2018,65(10):8112-8123. |
| 13 | 刘磊,赵刚,唐康峻,等 .基于改进灰狼算法的机器人激励轨迹优化[J].组合机床与自动化加工技术,2020(12):35-38. |
| LIU Lei, ZHAO Gang, TANG Kang-jun,et al .Optimization of robot excitation trajectory based on improved gray wolf optimizer[J].Modular Machine Tool & Automatic Manufacturing Technique,2020(12):35-38. | |
| 14 | 张文杰 .基于动力学参数辨识的轨迹跟踪控制策略研究[D].南昌:南昌大学,2022. |
| 15 | GAVIN H P .The Levenberg-Marquardt algorithm for nonlinear least squares curve-fitting problems[R].Durham:Duke University,2019:1-19. |
| 16 | 韩京清 .自抗扰控制技术[M].北京:国防工业出版社,2008. |
| 17 | 李珍珠 .面向HSR-605机器人的轨迹优化研究[D].武汉:华中科技大学,2019. |
/
| 〈 |
|
〉 |