
Journal of South China University of Technology(Natural Science) >
Adaptive Fuzzy Tracking Control of Unmanned Surface Vehicle with State and Input Quantization
Received date: 2023-10-10
Online published: 2023-10-24
Supported by
the Key Program of National Natural Science Foundation of China(51939001);the National Natural Science Foundation of China(61976033);the China Youth Fund Project of National Natural Science Foundation of China(61803064);the Natural Science Foundation of Liaoning Province(20170540098)
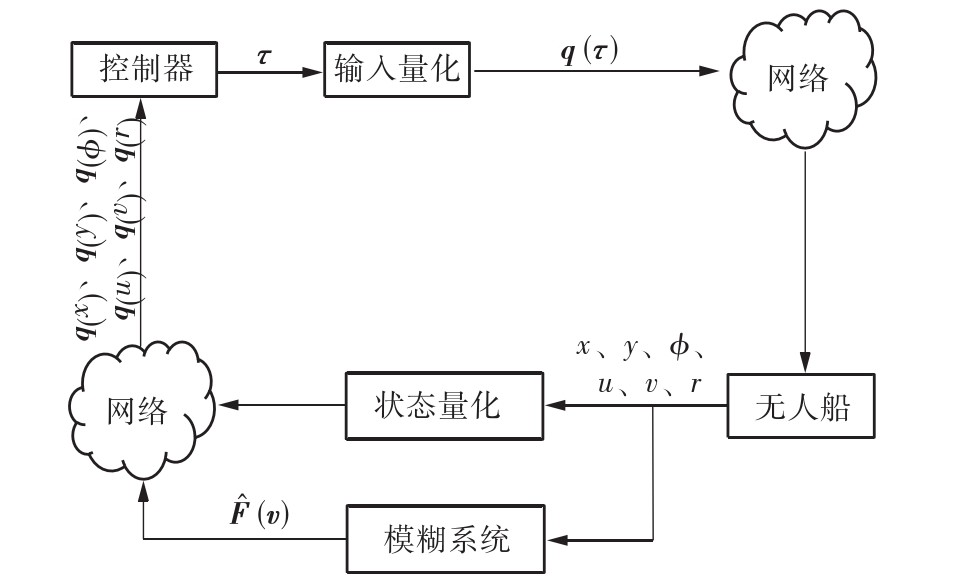
An adaptive feedback tracking control scheme with state and input quantization was designed for the track tracking control problem of unmanned unmanned surface vehicle under the restricted communication bandwidth at sea. While ensuring effective tracking, it reduces the burden of maritime communication signal transmission, decreases the actuator execution frequency and reduces the control amplitude. Firstly, the system control law was designed based on the adaptive backstepping method, which combined with the dynamic surface technology to effectively reduce the computational inflation problem of the virtual control law. For the uncertain terms existing in the control system, a fuzzy logic system was used for approximation. Next, the state variables and input variables in the control system were quantized separately using a uniform quantizer, and the quantized state feedback information was used in the design of the unmanned surface vehicle track tracking controller. Based on the obtained quantization information, a control law for tracking the trajectory of an unmanned surface vehicle was proposed under the conditions of simultaneous consideration of state and input quantization. The boundedness of the errors between quantized and unquantized variables in the closed-loop control system was demonstrated by a recursive approach. The stability of the designed fuzzy adaptive feedback tracking control system with state quantization and input quantization was demonstrated based on Lyapunov stability theory when both state quantization and input quantization were considered. Finally, the effectiveness of the proposed scheme is verified by two sets of simulation experiments. That is, under the simultaneous consideration of state quantification and input quantification, the unmanned surface vehicle can still maintain a good tracking performance of the ideal trajectory, and effectively reduce the execution frequency of the actuator, which is more in line with the practice of navigation engineering.
NING Jun, MA Yifan, LI Wei, et al . Adaptive Fuzzy Tracking Control of Unmanned Surface Vehicle with State and Input Quantization[J]. Journal of South China University of Technology(Natural Science), 2024 , 52(5) : 52 -61 . DOI: 10.12141/j.issn.1000-565X.230215
| 1 | 刘训文,徐超,陈再发 .事件触发的自适应PID海洋水面船舶航迹跟踪控制[J].上海海事大学学报,2023,44(2):11-17. |
| LIU Xunwen, XU Chao, CHEN Zaifa .Event-triggered adaptive PID trajectory tracking control for marine surface vehicles[J].Journal of Shanghai Maritime University,2023,44(2):11-17. | |
| 2 | PARK B S, KWON J W, KIM H .Neural network-based output feedback control for reference tracking of underactuated surface vessels[J].Automatica,2017,77:353-359. |
| 3 | ZHANG G, LI J, YU W,et al .Event-triggered robust neural control for unmanned sail-assisted vehicles subject to actuator failures[J].Ocean Engineering,2020,216:107754/1-11. |
| 4 | ZHANG G, CHU S, JIN X,et al .Composite neural learning fault-tolerant control for underactuated vehicles with event-triggered input[J].IEEE Transactions on Cybernetics,2020,51(5):2327-2338. |
| 5 | CHWA D .Global tracking control of underactuated ships with input and velocity constraints using dynamic surface control method[J].IEEE Transactions on Control Systems Technology,2010,19(6):1357-1370. |
| 6 | PETTERSEN K Y, NIJMEIJER H .Underactuated ship tracking control:theory and experiments[J].International Journal of Control,2001,74(14):1435-1446. |
| 7 | LIU S, JIANG B, MAO Z,et al .Adaptive fault-tolerant formation control of heterogeneous multi-agent systems under directed communication topology[J].Sensors,2022,22(16):6212/1-20. |
| 8 | 董早鹏,刘涛,万磊,等 .基于Takagi-Sugeno模糊神经网络的欠驱动无人艇直线航迹跟踪控制[J].仪器仪表学报,2015,36(4):863-870. |
| DONG Zaopeng, LIU Tao, WAN Lei,et al .Straight-path tracking control of underactuated USV based on Takagi-Sugeno fuzzy neural network[J].Chinese Journal of Scientific Instrument,2015,36(4):863-870. | |
| 9 | NING J, LI T, CHEN C L P .Neuro-adaptive distributed formation tracking control of under-actuated unmanned surface vehicles with input quantization[J].Ocean Engineering,2022,265:112492/1-12. |
| 10 | PARK B S, YOO S J .Quantized-communication-based neural network control for formation tracking of networked multiple unmanned surface vehicles without velocity information[J].Engineering Applications of Artificial Intelligence,2022,114:105160/1-11. |
| 11 | YU X N, HAO L Y .Integral sliding mode fault tolerant control for unmanned surface vessels with quantization:less iterations[J].Ocean Engineering,2022,260:111820/1-10. |
| 12 | ZHOU J, WEN C, WANG W,et al .Adaptive backstepping control of nonlinear uncertain systems with quantized states[J].IEEE Transactions on Automatic Control,2019,64(11):4756-4763. |
| 13 | CHOI Y H, YOO S J .Quantized feedback adaptive command filtered backstepping control for a class of uncertain nonlinear strict-feedback systems[J].Nonlinear Dynamics,2020,99(4):2907-2918. |
| 14 | CHOI Y H, YOO S J .Neural-networks-based adaptive quantized feedback tracking of uncertain nonlinear strict-feedback systems with unknown time delays[J].Journal of the Franklin Institute,2020,357(15):10691-10715. |
| 15 | CHOI Y H, YOO S J .Distributed quantized feedback design strategy for adaptive consensus tracking of uncertain strict-feedback nonlinear multiagent systems with state quantizers[J].IEEE Transactions on Cybernetics,2021,52(7):7069-7083. |
| 16 | HAO L Y, ZHANG H, LI H,et al .Sliding mode fault-tolerant control for unmanned marine vehicles with signal quantization and time-delay[J].Ocean Engineering,2020,215:107882/1-11. |
| 17 | HAO L Y, ZHANG H, LI T S,et al .Fault tolerant control for dynamic positioning of unmanned marine vehicles based on T-S fuzzy model with unknown membership functions[J].IEEE Transactions on Vehicular Technology,2021,70(1):146-157. |
| 18 | HAO L Y, YU Y, LI T S,et al .Quantized output-feedback control for unmanned marine vehicles with thruster faults via sliding-mode technique[J].IEEE Transactions on Cybernetics,2021,52(9):9363-9376. |
| 19 | WU J, SUN W, SU S F,et al .Adaptive asymptotic tracking control for input-quantized nonlinear systems with multiple unknown control directions[J].IEEE Transactions on Cybernetics,2022,53(8):5216-5225. |
| 20 | YOO S J, PARK B S .Quantized-states-based adaptive control against unknown slippage effects of uncertain mobile robots with input and state quantization[J].Nonlinear Analysis:Hybrid Systems,2021,42:101077/1-17. |
| 21 | 沈智鹏,曹晓明 .输入受限四旋翼飞行器的模糊自适应动态面轨迹跟踪控制[J].控制与决策,2019,34(7):1401-1408. |
| SHEN Zhi-peng, CAO Xiao-ming .Fuzzy adaptive dynamic surface trajectory tracking control for quadrotor UAV with input constraints[J].Control and Decision,2019,34(7):1401-1408. | |
| 22 | SWAROOP D, HEDRICK J K, YIP P P,et al .Dynamic surface control for a class of nonlinear systems[J].IEEE Transactions on Automatic Control,2000,45(10):1893-1899. |
| 23 | CHOI B J, KWAK S W, KIM B K .Design of a single-input fuzzy logic controller and its properties[J].Fuzzy Sets and Systems,1999,106(3):299-308. |
| 24 | WANG J, RAD A B, CHAN P T .Indirect adaptive fuzzy sliding mode control:part I:fuzzy switching[J].Fuzzy Sets and Systems,2001,122(1):21-30. |
| 25 | NING J, MA Y, LIU L,et al .Fuzzy course tracking control of an unmanned surface vehicle with event-triggered mechanism and input quantization[J].Ocean Engineering,2023,288:115704/1-8. |
/
| 〈 |
|
〉 |