
Journal of South China University of Technology(Natural Science) >
Event-Triggered Impulsive Observer-Based Stabilization for Lipschitz Nonlinear Systems with Discrete-Time Stochastic Measurement Noises
Received date: 2023-01-10
Online published: 2023-06-21
Supported by
the National Natural Science Foundation of China(62003104);the Guangxi Natural Science Foundation(2022GXNSFBA035649)
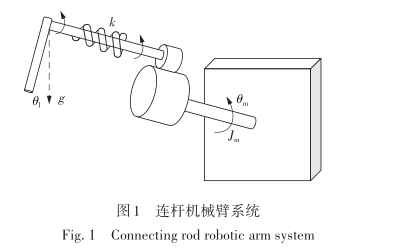
In order to improve the utilization of computing or communication resources and reduce energy consumption, the study proposed the event-triggered impulsive observer-based output feedback control method for a class of nonlinear systems with aperiodic sampling and stochastic measurement noises. Firstly, by introducing an event-triggering mechanism that only depends on the discrete-time measurement output and an auxiliary variable, it designed a novel event-triggered impulsive observer. Then by constructing an augmented system composed of the original system and the observer error system and developing the quasi-periodic discretized Lyapunov function method, it established an ultimate bounded stability criterion in the mean square sense of the augmented closed-loop systems. The criterion reveals the influence mechanism of the sampling period, noise intensity, and event trigger parameters on system performance. Next, combined with the joint design approach, the output feedback controller synthesis problem was transformed into solving a set of LMIs based on the augmented system, thus solving the difficult problem that the state feedback gain and the observer gain cannot be separated in the presents of the stochastic measurement noise. Finally, on the Matlab platform, the performance of the proposed control method was analyzed via a connecting rod robotic arm. The experimental results demonstrate that the proposed method is effective in reducing the number of transmissions and conserving communication/computing resources. Furthermore, it successfully addresses the stabilization problems of nonlinear systems with stochastic measurement noise, thus confirming the effectiveness of the proposed approach.
LUO Shixian, CHEN Xin, HUANG Ganji . Event-Triggered Impulsive Observer-Based Stabilization for Lipschitz Nonlinear Systems with Discrete-Time Stochastic Measurement Noises[J]. Journal of South China University of Technology(Natural Science), 2023 , 51(11) : 35 -43 . DOI: 10.12141/j.issn.1000-565X.230012
| 1 | CHANG X H, XIONG J, LI Z M,et al .Quantized static output feedback control for discrete-time systems[J].IEEE Transactions on Industrial Informatics,2017,14(8):3426-3435. |
| 2 | HUYNH V T, NGUYEN C M, TRINH H .Static output feedback control of positive linear systems with output time delays[J].International Journal of Systems Science,2019,50(15):2815-2823. |
| 3 | BERRNARD P, ANDRIEU V, ASTOLFI D .Observer design for continuous-time dynamical systems[J].Annual Reviews in Control,2022,53:224-248. |
| 4 | LUO S, DENG F, CHEN W-H .Stability and stabilization of linear impulsive systems with large impulse-delays:a stabilizing delay perspective[J].Automatica,2021,127:109533/1-7. |
| 5 | NIAMSUP P, PHAT V N .State feedback stabilization of linear descriptor time-varying delay systems[J].Transactions of the Institute of Measurement and Control,2020,42(12):2191-2197. |
| 6 | 冯智辉,邓飞其,刘文辉 .一类二次型离散系统的有限时间稳定与镇定[J].华南理工大学学报(自然科学版),2015,43(1):9-14. |
| FENG Zhi-hui, DENG Fei-qi, LIU Wen-hui .Finite-time stability and stabilization for a class of quadratic discrete-time systems[J].Journal of South China University of Technology (Natural Science Edition),2015,43(1):9-14. | |
| 7 | WANG Y, LI X .Impulsive observer and impulsive control for time-delay systems[J].Journal of the Franklin Institute,2020,357(13):8529-8542. |
| 8 | CHEN W-H, CHENG L, LU X .Observer-based feedback stabilization of Lipschitz nonlinear systems in the presence of asynchronous sampling and scheduling protocols[J].Nonlinear Analysis:Hybrid Systems,2019,33:282-299. |
| 9 | 黄俊华,胥布工,陈立定 .信息物理融合系统的分布式采样控制[J].华南理工大学学报(自然科学版),2019,47(2):31-40. |
| HUANG Junhua, XU Bugong, CHEN Liding .Distributed sampled-data control of cyber-physical systems[J].Journal of South China University of Technology (Natural Science Edition),2019,47(2):31-40. | |
| 10 | LUO S, DENG F, ZHAO X,et al .Stochastic stabilization using aperiodically sampled measurements[J].Science China:Information Sciences,2019,62(9):1-11. |
| 11 | FU X, KANG Y, LI P,et al .Control for a class of stochastic mechanical systems based on the discrete-time approximate observer[J].Journal of Systems Science and Complexity,2019,32(2):526-541. |
| 12 | LING C, KRAVARIS C .Multirate sampled-data observer design based on a continuous-time design[J].IEEE Transactions on Automatic Control,2019,64(12):5265-5272. |
| 13 | KARAFYLLIS I, AHMED-ALI T, GIRI F .A note on sampled-data observers[J].Systems & Control Letters,2020,144:104760/1-8. |
| 14 | MAZENC F, FRIDMAN E .Predictor-based sampled-data exponential stabilization through continuous-discrete observers[J].Automatica,2016,63:74-81. |
| 15 | SFERLAZZA A, TARBOURIECH S, ZACCARIAN L .State observer with Round-Robin aperiodic sampled measurements with jitter[J].Automatica,2021,129:109573/1-10. |
| 16 | DAM Q T, THABET R E H, ALI S A,et al .Observer design for a class of uncertain nonlinear systems with sampled-delayed output using high-gain observer and low-pass filter:application for a quadrotor UAV[J].IEEE Transactions on Industrial Electronics,2023,71(1):933-942. |
| 17 | HEEMELS W P M H, JOHANSSON K H, TABUADA P .An introduction to event-triggered and self-triggered control[C]∥ Proceedings of the 51st IEEE Conference on Decision and Control.Maui:IEEE,2012:3270-3285. |
| 18 | WU L, GAO Y, LIU J,et al .Event-triggered sliding mode control of stochastic systems via output feedback[J].Automatica,2017,82:79-92. |
| 19 | HUONG D C, HUYNH V T, TRINH H .Dynamic event-triggered state observers for a class of nonlinear systems with time delays and disturbances[J].IEEE Transactions on Circuits and Systems Ⅱ:Express Briefs,2020,67(12):3457-3461. |
| 20 | GE X, HAN Q L, DING L,et al .Dynamic event-triggered distributed coordination control and its applications:a survey of trends and techniques[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2020,50(9):3112-3125. |
| 21 | 孙子文,刘加磊 .工业信息物理系统间隙DoS攻击的自适应事件触发稳定控制[J].华南理工大学学报(自然科学版),2023,51(3):146-156. |
| SUN Ziwen, LIU Jialei .Adaptive event-triggered stability control for intermittent DoS attacks in industrial cyber physical systems[J].Journal of South China University of Technology (Natural Science Edition),2023,51(3):146-156. | |
| 22 | DINH C H .On event-triggered robust observer-based control problem of one-sided Lipschitz time-delay systems[J].Asian Journal of Control,2022,24(5):2234-2243. |
| 23 | PETRI E, POSTOYAN R, ASTOLFI D,et al .Decentralized event-triggered estimation of nonlinear systems[EB/OL].(2022-10-07)[2023-01-05].. |
| 24 | 刘文辉,邓飞其,任红卫,等 .具有测量噪声的领导者跟随者系统跟随控制[J].华南理工大学学报(自然科学版),2014,42(8):45-51. |
| LIU Wen-hui, DENG Fei-qi, REN Hong-wei,et al .Tracking control of multi-agent systems with an active leader and measurement noises[J].Journal of South China University of Technology (Natural Science Edition),2014,42(8):45-51. | |
| 25 | BATTILOTTI S .Robust observer design under measurement noise with gain adaptation and saturated estimates[J].Automatica,2017,81:75-86. |
| 26 | ESFANDIARI K, SHAKARAMI M .Bank of high-gain observers in output feedback control:robustness analysis against measurement noise[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2021,51(4):2476-2487. |
| 27 | PRASOV A A, KHALIL H K .A nonlinear high-gain observer for systems with measurement noise in a feedback control framework[J].IEEE Transactions on Automatic Control,2012,58(3):569-580. |
| 28 | CHEN W-H, SUN H, LU X .A variable gain impulsive observer for Lipschitz nonlinear systems with measurement noises[J].Journal of the Franklin Institute,2022,359(18):11186- 11207. |
| 29 | CHEN W-H, ZHENG W X .Robust stabilization of delayed Markovian jump systems subject to parametric uncertainties[C]∥ Proceedings of the 46th IEEE Conference on Decision and Control.New Orleans:IEEE,2007:3054-3059. |
| 30 | CHEN W-H, YANG W, ZHENG W X .Adaptive impulsive observers for nonlinear systems:revisited[J].Automatica,2015,61:232-240. |
| 31 | RAFF T, KOGEL M, ALLGOWER F .Observer with sample-and-hold updating for Lipschitz nonlinear systems with nonuniformly sampled measurements[C]∥Proceedings of 2008 American Control Conference.Seattle:IEEE,2008:5254-5257. |
/
| 〈 |
|
〉 |