
Journal of South China University of Technology(Natural Science) >
Learning and Generalization of Dual-Robot Cooperative Handling Trajectory Based on Dynamic Movement Primitives
Received date: 2023-01-10
Online published: 2023-06-21
Supported by
the General Program of National Natural Science Foundation of China(62073092);the Key R&D Plan Projects in Shaanxi Province(2021ZDLGY09-02)
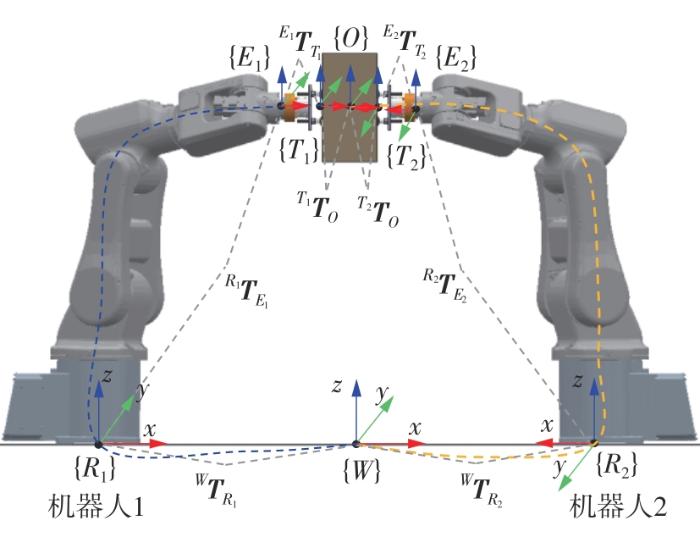
Aiming at the problems of complex trajectory learning and lack of coordination constraint analysis when a dual-robot collaborative system performs humanoid tasks with strong coordination constraints, this paper proposed a dual-robot cooperative handling trajectory learning and generalization method based on dynamic movement primitives (DMPs). Firstly, starting from the dual-robot cooperative handling task, the coordination constraints of the dual-robot were analyzed, and the motion constraint model of the dual-robot was established. Then, the robot motion trajectory was decoupled into position trajectory and orientation trajectory, and the quaternion was used to realize the non-singular description of the orientation trajectory. And the dynamic movement primitives model of position trajectory and orientation trajectory were established respectively. They were combined with the dual robot motion constraint model and DMPs model, and the dual-robot movement trajectory was obtained, taking into account their respective task requirements and relative pose constraints. Finally, the simulation and experiments of the cooperative handling trajectory of the two robots were carried out. The results show that: using the learning and generalization method of the dual-robot cooperative handling trajectory, when the starting and ending states are changed, the position errors of start point and end point of the dual-robot cooperative handling with the fixed orientation are 0.029 2 mm and 0.112 7 mm respectively; the position errors of start point and end point of variable orientation coordinated handling are 0.032 3 mm and 0.113 1 mm respectively; and the quaternion orientation errors of the end point are 0.001 4, 0.002 7, 0.001 8, 0.003 0, indicating that the cooperative handling trajectory learning and generalization method has high motion control accuracy; even if the task parameters of the starting and ending are changed, the generalized trajectory can still ensure the accessibility of the target, which verified the scientificity and effectiveness of the proposed dual-robot coordination motion trajectory control strategy. The method proposed in this paper can effectively learn the human handling process and can accurately generalize new motion trajectories. It realizes the dual-robot coordinated motion and has important engineering application value.
CAO Xuepeng, WANG Deshuo, FENG Yanli, et al . Learning and Generalization of Dual-Robot Cooperative Handling Trajectory Based on Dynamic Movement Primitives[J]. Journal of South China University of Technology(Natural Science), 2023 , 51(12) : 9 -20 . DOI: 10.12141/j.issn.1000-565X.230013
| 1 | JI W, WANG L .Industrial robotic machining:a review[J].The International Journal of Advanced Manufacturing Technology,2019,103(1):1239-1255. |
| 2 | BIEN Z, LEE J .A minimum-time trajectory planning method for two robots[J].IEEE Transactions on Robotics and Automation,1992,8(3):414-418. |
| 3 | PETAR C, BOJAN J .Dual-arm robot motion planning based on cooperative coevolution[J].Emerging Trends in Technological Innovation,2010,314(6):169-178. |
| 4 | SMITH C, KARAYIANNIDIS Y, NALPANTIDIS L,et al .Dual arm manipulation-a survey[J].Robotics and Autonomous Systems,2012,60(10):1340-1353. |
| 5 | GAN Y H, DAI X .Kinematic cooperation analysis and trajectory teaching in multiple robots system for welding[C]∥Proceedings of ETFA 2011.Toulouse:IEEE,2011:1-8. |
| 6 | LI J, LIU Y, ZANG X .Constraints analysis and motion planning for coordinated manipulation of a dual-arm robot[C]∥Proceedings of 2018 IEEE International Conference on Information and Automation (ICIA).Wuyi Mountain:IEEE,2018:1422-1426. |
| 7 | GULLETTA G, ERLHAGEN W, BICHO E .Human-like arm motion generation:a review[J].Robotics,2020,9(4):102-149. |
| 8 | SCHAAL S .Is imitation learning the route to humanoid robots?[J].Trends in Cognitive Sciences,1999,3(6):233-242. |
| 9 | KOENIG N, MATARIC M .Robot life-long task learning from human demonstrations:a Bayesian approach[J],Autonomous Robots,2017,41(5):1173-1188. |
| 10 | PIGNAT E, CALINON S .Learning adaptive dressing assistance from human demonstration[J].Robotics and Autonomous Systems,2017,93:61-75. |
| 11 | SHIN S Y, KIM C H .Human-like motion generation and control for humanoid’s dual arm object manipulation[J].IEEE Transactions on Industrial Electronics,2014,62(4):2265-2276. |
| 12 | QU J, ZHANG F, WANG Y,et al .Human-like coordination motion learning for a redundant dual-arm robot[J].Robotics and Computer-Integrated Manufacturing,2019,57:379-390. |
| 13 | IJSPEERT A J, NAKANISHI J, HOFFMANN H,et al .Dynamical movement primitives:learning attractor models for motor behaviors[J].Neural Computation,2013,25(2):328-373. |
| 14 | COHEN Y, BARSHIR O, BERMAN S .Motion adaptation based on learning the manifold of task and dynamic movement primitive parameters[J].Robotica,2021,39(7):1299-1315. |
| 15 | KULVICIUS T, BIEHL M, AEIN M J,et al .Interaction learning for dynamic movement primitives used in cooperative robotic tasks[J].Robotics and Autonomous Systems,2013,61(12):1450-1459. |
| 16 | UMLAUFT J, SIEBER D, HIRCHE S .Dynamic movement primitives for cooperative manipulation and synchronized motions[C]∥Proceedings of 2014 IEEE International Conference on Robotics and Automation (ICRA).Hong Kong:IEEE,2014:766-771. |
| 17 | ZHAO T, DENG M, LI Z,et al .Cooperative manipulation for a mobile dual-arm robot using sequences of dynamic movement primitives[J].IEEE Transactions on Cognitive and Developmental Systems,2018,12(1):18-29. |
| 18 | 孟石,戴先中,甘亚辉 .多机器人协作系统轨迹约束关系分析及示教方法[J].机器人,2012,34(5):546-552,565. |
| MENG Shi, DAI Xian-zhong, GAN Ya-hui .Path constraint relation and trajectory teaching method for multi-robot cooperation System[J].Robot,2012,34(5):546-552,565. | |
| 19 | 张磊,王威 .双机器人协同搬运运动学分析及路径规划[J].机械工程与自动化,2020(2):89-91,94. |
| ZHANG Lei, WANG Wei .Kinematics analysis and path planning of dual-robot collaborative handling [J].Mechanical Engineering and Automation,2020(2):89-91,94. | |
| 20 | IJSPEERT A J, NAKANISHI J, SCHAAL S .Movement imitation with nonlinear dynamical systems in humanoid robots[C]∥Proceedings of 2002 IEEE International Conference on Robotics and Automation.Washington,DC:IEEE,2002:1398-1403. |
| 21 | HOFFMANN H, PASTOR P, PARK D H,et al .Biologically-inspired dynamical systems for movement generation:automatic real-time goal adaptation and obstacle avoidance[C]∥Proceedings of 2009 IEEE International Conference on Robotics and Automation.Kobe:IEEE,2009:2587-2592. |
| 22 | UDE A, NEMEC B, PETRIC T,et al .Orientation in cartesian space dynamic movement primitives[C]∥Proceedings of 2014 IEEE International Conference on Robotics and Automation (ICRA).Hong Kong:IEEE,2014:2997-3004. |
| 23 | 张磊,方灶军,王聚幸,等 .基于任务参数加权的动态运动基元泛化方法[J].中国机械工程,2022,33(10):1226-1233,1243. |
| ZHANG Lei, FANG Zao-jun, WANG Ju-xing,et al .Generalization method of dynamic movement primitives based on the weighting of task parameters[J].China Mechanical Engineering,2022,33(10):1226-1233,1243. | |
| 24 | SOLA J .Quaternion kinematics for the error-state Kalman filter[J].arXiv preprint arXiv:,2017. |
| 25 | 王健发,王耀南,陈文锐,等 .基于改进动态运动基元的6D轨迹规划[J].控制理论与应用,2022,39(5):809-818. |
| WANG Jian-fa, WANG Yao-nan, CHEN Wen-rui,et al .6D trajectory planning based on improved dynamic motion primitives[J].Control Theory and Applications,2022,39(5):809-818. | |
| 26 | 工业机器人性能规范及其试验方法: [S]. |
/
| 〈 |
|
〉 |