
Research on Optimized Teaching Strategy and BPNN-DMPs Trajectory Learning Model of Massage Robot
Received date: 2023-01-20
Online published: 2023-06-21
Supported by
the Natural Science Foundation of Guangdong Province(2023A1515010682)
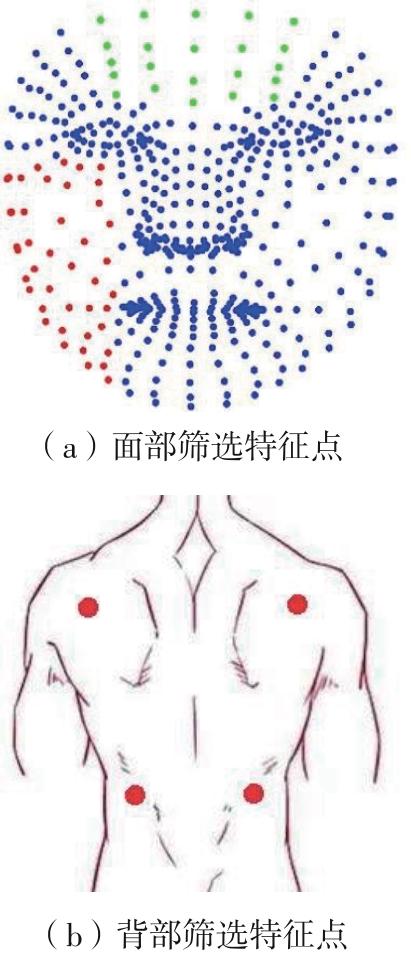
For the individual difference of faces which are the operation object of massage robot, the dynamic motion primitives (DMPs) model was used to generalize the posture trajectory and force trajectory. Firstly, in order to improve the learning accuracy of DMPs, the study proposed an optimized teaching strategy. Based on the Mediapipe feature points in the massage area, the similarity between the operating objects was calculated to optimize the learning objects. Secondly, Gaussian mixture regression (GMR) was introduced, and the algorithm integrated multiple massage information to enhance learning ability. Finally, a back-propagation neural network (BPNN) model was constructed to fit the forced term of DMPs algorithm, which fundamentally changes the limitations of the original model. The experiment shows that the average errors of position and attitude of BPNN-DMPs model are reduced by 44.1% and 54.5%, 44.1% and 54.5%, 29.7% and 46.4% respectively, compared with DMPs, MDMPs and SADMPs algorithms without increasing the running time. Gaussian mixture regression can integrate multiple trajectory patterns and the implementation effect of the optimized teaching strategy is significant. Compared with the non-optimized object, the average errors of the position and posture of the face experiment are reduced by 52.3% and 70.2%, and the standard deviation is reduced by 46.3% and 71.1%. The average errors of position, posture and force in the back experiment decrease by 27.7%, 66.7% and 24.1%, and the standard deviation decreases by 25.7%, 54.4% and 44.1%.
ZHAI Jingmei, LU Dongwei . Research on Optimized Teaching Strategy and BPNN-DMPs Trajectory Learning Model of Massage Robot[J]. Journal of South China University of Technology(Natural Science), 2023 , 51(12) : 1 -8 . DOI: 10.12141/j.issn.1000-565X.230027
| 1 | CHEN H, WU X, WEI F,et al .Design and path planning of massagebot:one massaging robot climbing along the acupuncture points[C]∥Proceedings of 2016 IEEE International Conference on Information and Automation (ICIA).Ningbo:IEEE,2017:969-973. |
| 2 | YANG C, CHEN C, HE W,et al .Robot learning system based on adaptive neural control and dynamic movement primitives[J].IEEE Transactions on Neural Networks and Learning Systems,2019,30(3):777-787. |
| 3 | MATSUBARA T, HYON S H, MORIMOTO J .Learning parametric dynamic movement primitives from multiple demonstrations[J].Neural Networks the Official Journal of the International Neural Network Society,2011,24(5):493-500. |
| 4 | ABU-DAKKA F J, NEMEC B, JIMMY A,et al .Adaptation of manipulation skills in physical contact with the environment to reference force profiles[J].Autonomous Robots,2015,39(2):199-217. |
| 5 | WANG R, WU Y, CHAN W L,et al .Dynamic movement primitives plus:for enhanced reproduction quality and efficient trajectory modification using truncated kernels and Local Biases[C]∥Proceedings of IEEE/RSJ International Conference on Intelligent Robots & Systems.Daejeon:IEEE,2016:3765-3771. |
| 6 | PARK D H, HOFFMANN H, PASTOR P,et al .Movement reproduction and obstacle avoidance with dynamic movement primitives and potential fields[C]∥Proceedings of Humanoids 2008-8th IEEE-RAS International Conference on Humanoid Robots. Daejeon:IEEE,2008:91-98. |
| 7 | YUE Z, RONG X, FANG L,et al .Generating a style-adaptive trajectory from multiple demonstrations[J].International Journal of Advanced Robotic Systems,2014,11(7):1-9. |
| 8 | GINESI M, SANSONETTO N, FIORINI P .Overcoming some drawbacks of dynamic movement primitives[J].Robotics and Autonomous Sytems,2021,144(2):103844-103844. |
| 9 | WANG N, CHEN C, YANG C .A robot learning framework based on adaptive admittance control and generalizable motion modeling with Neural Network Controller[J].Neurocomputing,2019,390(1229):260-267. |
| 10 | LUGARESI C, TANG J, NASH H,et al .MediaPipe:a framework for building perception pipelines[J].ArXiv,2019,doi:10.48550/arXiv.1906.08172 . |
| 11 | ZHANG Y, LI M, YANG C .Robot learning system based on dynamic movement primitives and neural network[J].Neurocomputing,2021,451(1431):205-214. |
| 12 | SU H, MARIANI A, OVUR S E,et al .Toward teaching by demonstration for robot-assisted minimally invasive surgery[J].IEEE Transactions on Automation Science and Engineering,2021,18(2):484-494. |
| 13 | LI J, LI Z, LI X,et al .Skill learning strategy based on dynamic motion primitives for human-robot cooperative manipulation[J].IEEE Transactions on Cognitive and Developmental Systems,2021,13(1):105-117. |
| 14 | WANG T, YAN L, WANG G,et al .Learning from demonstration using improved dynamic movement primitives[C]∥Proceedings of 2021 IEEE 16th Conference on Industrial Electronics and Applications (ICIEA).Chengdu:IEEE,2021:2130-2135. |
| 15 | 何嘉玉,黄宏博,张红艳,等 .基于深度学习的单幅图像三维人脸重建研究综述[J].计算机科学,2022,49(2):40-50. |
| HE Jiayu, HUANG Hongbo, ZHANG Hongyan,et al .Review of 3D face reconstruction based on single image[J].Computer Science,2022,49(2):40-50. |
/
| 〈 |
|
〉 |