
Journal of South China University of Technology(Natural Science) >
Braking Transient Impact Suppression Strategy for Single Rope Winding Mine Hoist
Received date: 2023-03-30
Online published: 2023-06-20
Supported by
the National Natural Science Foundation of China(U21A20125,52175068,51805532)
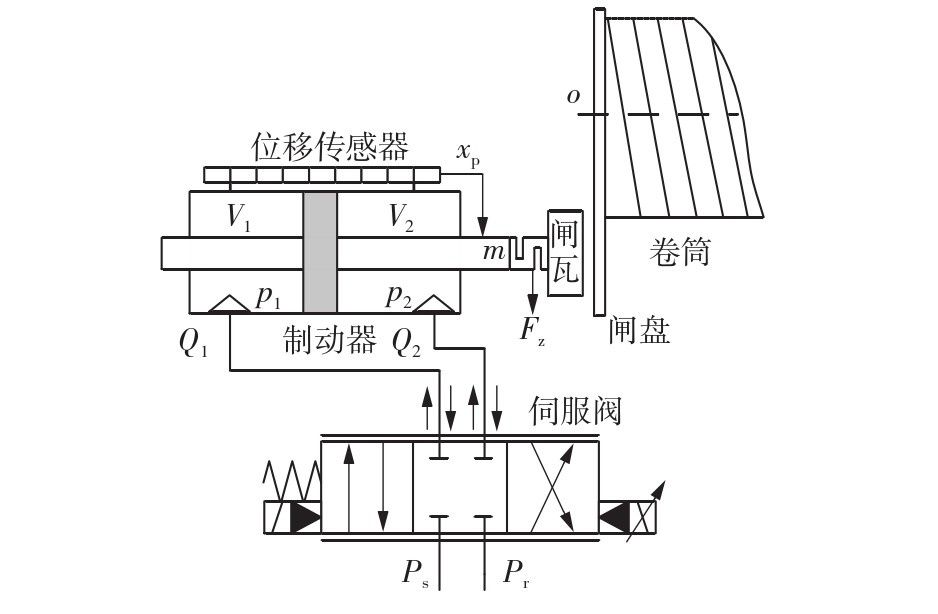
In the braking control for mine hoists, braking transient impact is a key issue affecting the operational safety and reliability of mine hoists. Currently, due to the constraints of technology and economic costs, the braking process, including shoe-approaching and braking control, adopts force closed-loop control mode, which inevitably leads to the transient impact of braking pressure when the brake shoe is in rigid contact with the brake disc. Aiming at the problem of transient braking impact for mine hoists, this paper designed a hybrid shoe-approaching and braking control strategy by using the hysteretic-relay-based switching principle. Firstly, the non-singular fast terminal sliding mode control and backstepping control were adopted to design the controller for the shoe-approaching and braking system, respectively. Secondly, in order to achieve the purpose of fast shoe-approaching, it developed an online shoe-approaching trajectory re-planning method based on discrete integrator, which effectively reduces the shoe-approaching time of the system. Then, by using of the hysteretic switching principle, it developed an autonomous switching strategy from shoe-approaching control to braking control, which greatly reduces the transient impact of braking pressure. Finally, to verify the effectiveness of the proposed method, the traditional full-stroke pressure closed-loop control strategy C1 and hybrid shoe-approaching/pressure control strategy with direct switching C2 were selected as comparison methods, and comparative experiments were conducted on a single-rope winding hoisting test bench. The experimental results were analyzed from three aspects: braking time, maximum tracking error of braking force, and maximum tension of hoisting wire rope. The experimental results indicate that, compared with the C1 control strategy, the proposed braking control strategy reduces the braking time by 64.5% and the peak tension of the wire rope by 41 N. Compared with the C2 control strategy, the proposed braking control strategy reduces the braking force impact by 90.3% and the peak tension of the wire rope by 88 N. These results demonstrate that the proposed approach effectively improves the transient impact of braking, reduces shoe-approaching time, and improves the safety of the braking system. This study also provides an effective solution for a class of electro-hydraulic servo systems that require mixed force/position control.
XIE Hui, SHEN Gang, LIU Dong, et al . Braking Transient Impact Suppression Strategy for Single Rope Winding Mine Hoist[J]. Journal of South China University of Technology(Natural Science), 2024 , 52(3) : 141 -150 . DOI: 10.12141/j.issn.1000-565X.230167
| 1 | 杜波,张步斌,冯海平 .矿井提升设备的发展现状及趋势[J].矿山机械,2016,44(6):1-7. |
| DU Bo, ZHANG Bubin, FENG Haiping .Development status and tendency of mine hoisting equipments[J].Mining & Processing Equipment,2016,44(6):1-7. | |
| 2 | 李福勇,齐学海,安传栋 .基于DMC-PID双环控制的提升机恒减速制动系统研究[J].矿山机械,2022,50(11):21-26. |
| LI Fuyong, QI Xuehai, AN Chuandong .Research on constant deceleration braking system of hoist based on DMC-PID double-loop control[J].Mining & Processing Equipment,2022,50(11):21-26. | |
| 3 | 李明航,王效志,张君勇,等 .提升机恒减速制动系统控制策略研究与设计[J].煤矿机械,2022,43(9):10-13. |
| LI Minghang, WANG Xiaozhi, ZHANG Junyong,et al .Research and design of control strategy for constant deceleration braking system of windlass[J].Coal Mine Machinery,2022,43(9):10-13. | |
| 4 | HAN W, XIONG L, YU Z .Braking pressure control in electro-hydraulic brake system based on pressure estimation with nonlinearities and uncertainties[J].Mechanical Systems and Signal Processing,2019,131:703-727. |
| 5 | HWANG M C, HU X H .A robust position/force learning controller of manipulators via nonlinear H ∞ control and neural networks[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B (cybernetics),2000,30(2):310-321. |
| 6 | 樊绍巍,宗华,邱景辉,等 .机器人灵巧手柔性关节自适应阻抗控制[J].电机与控制学报,2012,16(12):78-86. |
| FAN Shaowei, ZONG Hua, QIU Jinghui,et al .Adaptive impedance control for dexterous robot hand with elastic joint[J].Electric Machines and Control,2012,16(12):78-86. | |
| 7 | YUAN S, QING Y, ZHANG Z,et al .Asymptotic switched composite adaptive control with application to robotic interaction tasks[J].International Journal of Robust and Nonlinear Control,2023,33(9):404-422. |
| 8 | 徐文福,周瑞兴,孟得山 .空间机器人在轨更换ORU的力/位混合控制方法[J].宇航学报,2013,34(10):1353-1361. |
| XU Wenfu, ZHOU Ruixing, MENG Deshan .A hybrid force/position control method of space robot performing On-Orbit ORU Replacement[J].Journal of Astronautics,2013,34(10):1353-1361. | |
| 9 | DAI K, ZHU Z, SHEN G,et al .Switched safe tracking control of chain tensioning system with multiple disturbances and kinematic constraints[J].IEEE/ASME Transactions on Mechatronics,2023,28(2):825-837. |
| 10 | ZHANG X .Robust integral sliding mode control for uncertain switched systems under arbitrary switching rules[J].Nonlinear Analysis:Hybrid Systems,2020,37:100900/1-20. |
| 11 | SUN T R, PENG L, CHENG L,et al .Stability-guaranteed variable impedance control of robots based on approximate dynamic inversion[J].IEEE Transactions on Systems,Man,and Cybernetics:Systems,2021,51(7):4193-4200. |
| 12 | BONCHIS A, CORKE P I, RYE D C,et al .Variable structure methods in hydraulic servo systems control[J].Automatic,2001,37(4):589-595. |
| 13 | 孙常春,靖新,刘玉忠 .带有非线性扰动的不确定切换系统鲁棒控制[J].电机与控制学报,2006,10(2):212-215,221. |
| SUN Changchun, JING Xin, LIU Yuzhong .Robust control for uncertain switched systems with nonlinear disturbances[J].Electric Machines and Control,2006,10(2):212-215,221. | |
| 14 | 李升波,李克强,王建强,等 .非奇异快速的终端滑模控制方法[J].信息与控制,2009,38(1):1-8. |
| LI Shengbo, LI Keqiang, WANG Jianqiang,et al .Nonsingular and fast terminal sliding mode control method[J].Information and Control,2009,38(1):1-8. | |
| 15 | LIAN S K, MENG W, LIN Z M, al et,Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode[J].IEEE Transactions on Industrial Electronics,2022,69(2):1597-1607. |
| 16 | 袁明星 .机电系统运动学和动力学约束下的轨迹规划研究[D].杭州:浙江大学,2019. |
| 17 | CHEN Z, HELIAN B B, ZHOU Y,et al .An integrated trajectory planning and motion control strategy of a variable rotational speed pump-controlled electro-hydraulic Actuator[J].IEEE/ASME Transactions on Mechatronics,2022,28(1):588-597. |
| 18 | YUAN M X, CHEN Z, YAO B,et al .An improved online trajectory planner with stability-guaranteed critical test curve algorithm for generalized parametric constraints[J].IEEE/ASME Transactions on Mechatronics,2018,23(5):2459-2469. |
| 19 | WANG L Y, CHANI T Y, ZHAI L F .Neural-network-based terminal sliding-mode control of robotic manipulators including actuator dynamics[J].IEEE Transactions on Industrial Electronics,2009,56(9):3296-3304. |
/
| 〈 |
|
〉 |