
Journal of South China University of Technology(Natural Science) >
Active Disturbance Rejection Control of Active Stabilizer System Based on Particle Swarm Optimization
Received date: 2022-08-19
Online published: 2022-12-05
Supported by
the Key Projects of National Key Research & Development Program of China(2017YFC0803901);the Heilongjiang Province Key Research & Development Project(JD22A014);the Natural Science Foundation of Heilongjiang Province(LH2021F002)
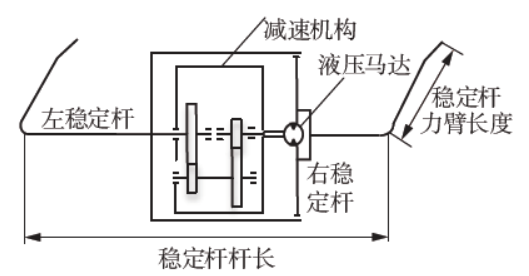
In order to improve the anti-roll ability of vehicle, this paper designed a hydraulic motor-driven active stabilizer control system, and proposed a hierarchical control strategy based on particle swarm optimization (PSO) algorithm. The upper active disturbance rejection controller (ADRC) calculates the anti-roll torque required by the whole vehicle, and the anti-roll torque required by the whole vehicle is distributed to the front and rear axles through a distributor. The lower three-loop proportional-integral-differential (PID) controller receives the anti-roll torque to be provided, calculates the control current and inputs it to the servo valve, so as to drive the motor output shaft to rotate and generates the active torque through the stabilizer bar to realize the active anti-roll control of the vehicle. In order to make the controller has better control effect, the PSO algorithm was used to optimize the upper and lower control as a whole, and the optimized ADRC and PID parameters were input into the vehicle model. In order to make the simulation close to the actual effect, the torsional stiffness of the lateral stabilizer bar measured by the experiment was also brought into the model. The serpentine and double lane shifting conditions were used for simulation on Class C road surface, and the simulation verification was carried out by comparing PSO-optimized ADRC system with passive system, PID control system and unoptimized ADRC system. The simulation data show that the roll angle directly affects the vehicle’s roll stability, the hierarchical control strategy optimized by PSO algorithm can significantly reduce the vehicle’s roll angle, and effectively suppress the instability caused by excessive body roll motion. The active control stabilizer can better provide the required anti-roll torque for the vehicle than the traditional passive stabilizer, and improve the anti-roll ability of the vehicle. The optimized ADRC controller has better active control effect than the passive system and the unoptimized ADRC controller. Under the same working condition, the roll angle is smaller, the anti-roll ability is stronger, the optimized three closed-loop PID response speed is faster, and the tracking performance is better.
ZHAO Qiang , LIU Chuanwei , ZHANG Na , ZHU Baoquan , XIE Chunli . Active Disturbance Rejection Control of Active Stabilizer System Based on Particle Swarm Optimization[J]. Journal of South China University of Technology(Natural Science), 2023 , 51(6) : 52 -61 . DOI: 10.12141/j.issn.1000-565X.220535
| 1 | NGUYEN D N, DANG N D, TRAN T H T,et al .Effect of the passive stabilizer bar on the vehicle’s stability[J].Modelling and Simulation in Engineering,2022(4):5523012/1-8. |
| 2 | 赵强,孙柱 .车辆主动式稳定杆系统的研究现状及展望[J].机电工程,2020,37(5):490-495. |
| ZHAO Qiang, SUN Zhu .Research status and prospects of vehicle active stabilizer bar system [J].Journal of Mechanical & Electrical Engineering,2020,37(5):490-495. | |
| 3 | NGUYEN T A, HOANG T B. Review on the stabilizer bar equipped with the vehicle [J].Journal of Mechanical Engineering Research and Developments,2021,44(6):156-161. |
| 4 | KONG Z, PI D, WANG X,et al .Design and evaluation of a hierarchical control algorithm for an electric active stabilizer bar system [J].Strojni?ki Vestnik-Journal of Mechanical Engineering,2016,62(10):565-576. |
| 5 | 赵韩,赵福民,黄康,等 .液压马达式汽车主动稳定杆系统建模与控制[J].中国机械工程,2016,27(14):1976-1981. |
| ZHAO Han, ZHAO Fumin, HUANG Kang,et al .Modeling and control of vehicle active stabilizer bar system with hydraulic motor [J].China Mechanical Engineering,2016,27(14):1976-1981. | |
| 6 | 赵强,孙柱 .基于卡尔曼滤波的车辆液压主动横向稳定杆最优控制研究[J].重庆交通大学学报(自然科学版),2020,39(11):128-135. |
| ZHAO Qiang, SUN Zhu .Optimal control of hydraulic active lateral stabilizer of vehicle based on Kalman filter [J].Journal of Chongqing Jiaotong University(Natural Science),2020,39(11):128-135. | |
| 7 | MENG Z, WANG L, SUN Y,et al .Application of switched reluctance motor in vehicle active stabilizer bar [J].Journal of Engineering Science and Technology Review,2019,12(4):168-175. |
| 8 | 李育龙 .电机式主动稳定杆控制系统设计与试验研究[D].南京:南京理工大学,2019. |
| 9 | NGUYEN T A .Preventing the rollover phenomenon of the vehicle by using the hydraulic stabilizer bar controlled by a two-input fuzzy controller [J].IEEE Access,2021,9:129168-129177. |
| 10 | NGUYEN T A .Improving the stability of the passenger vehicle by using an active stabilizer bar controlled by the fuzzy method [J].Complexity,2021,2021:6569298/1-20. |
| 11 | 邱香,吴新宇,陈正科,等 .考虑状态获取的主动前轮转向与主动横向稳定杆多目标集成控制[J].机械科学与技术,2022,41(3):386-393. |
| QIU Xiang, WU Xinyu, CHEN Zhengke,et al .Multi-objective integrated control of active front steering and active anti-roll bar considering state acquisition [J].Mechanical Science and Technology for Aerospace Engineering,2022,41(3):386-393. | |
| 12 | HWANG H Y, LAN T S, CHEN J S .Developing a strategy to improve handling behaviors of a medium-size electric bus using active anti-roll bar [J].Symmetry,2020,12(8):1334/1-33. |
| 13 | 李仲兴,许荣洲,江洪 .稳定杆对互联空气悬架车辆侧倾特性的影响[J].重庆理工大学学报(自然科学),2015,29(9):7-12. |
| LI Zhongxing, XU Rongzhou, JIANG Hong .Effect of stabilizer bar on interconnected air suspension rolling characteristics [J].Journal of Chongqing University of Technology(Natural Science),2015,29(9):7-12. | |
| 14 | STA?CO M, KOWALCZYK M, DZIALAK P .Numerical and experimental analysis of a front axis stabilizer bar [J].Materials Today:Proceedings,2022,62:2641-2647. |
| 15 | 黄海祺 .叶片式液压摆动油缸结构参数优化及动态性能测试[D].武汉:武汉科技大学,2021. |
| 16 | BRITO A G .Characterization of electrohydraulic actuators:technical and experimental aspects[J].Experimental Techniques,2016,40(2):865-874. |
| 17 | CAI Y, HE Y, ZHOU H,et al .Active damping disturbance rejection control strategy of LCL grid-connected inverter based on inverter-side current feedback [J].IEEE Journal of Emerging and Selected Topics in Power Electronics,2020,PP(99):1-1. |
| 18 | 伍文俊,蔡雨希,兰雪梅 .三电平中点钳位型变换器线性自抗扰离散建模与稳定控制[J].电工技术学报,2020,35(S1):37-48. |
| WU Wenjun, CAI Yuxi, LAN Xuemei .Discrete modeling and stability control of linear active disturbance rejection control for three-level neutral point clamped converter [J].Transactions of China Electrotechnical Society,2020,35(S1):37-48. | |
| 19 | NAZELAN A M, OSMAN M K, SAMAT A A A,et al .PSO-Based PI controller for speed sensorless control of PMSM[J].Journal of Physics:Conference Series,2018,1019:012027/1-12. |
/
| 〈 |
|
〉 |