Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (11): 77-89.doi: 10.12141/j.issn.1000-565X.240581
• Intelligent Transportation System • Previous Articles Next Articles
Path Planning Method Integrating Curve Combination and Numerical Optimization for Parallel Parking on Narrow Road
CHENG Guozhu, XUE Daoan, GU Shuang
- School of Civil Engineering and Transportation,Northeast Forestry University,Harbin 150040,Heilongjiang,China
-
Received:2024-12-13Online:2025-11-25Published:2025-07-01 -
Contact:顾爽(1994—),女,博士,讲师,主要从事交通运输规划与管理研究。 E-mail:s.gu@nefu.edu.cn -
About author:程国柱(1977—),男,教授,博士生导师,主要从事智能交通系统研究。E-mail: guozhucheng@126.com -
Supported by:the Key Research and Development Program of Heilongjiang Province(JD22A014)
CLC Number:
Cite this article
CHENG Guozhu, XUE Daoan, GU Shuang. Path Planning Method Integrating Curve Combination and Numerical Optimization for Parallel Parking on Narrow Road[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(11): 77-89.
share this article
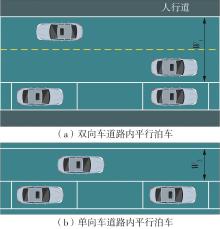
Fig.1
Schematic diagrams of parallel parking on narrow roads"
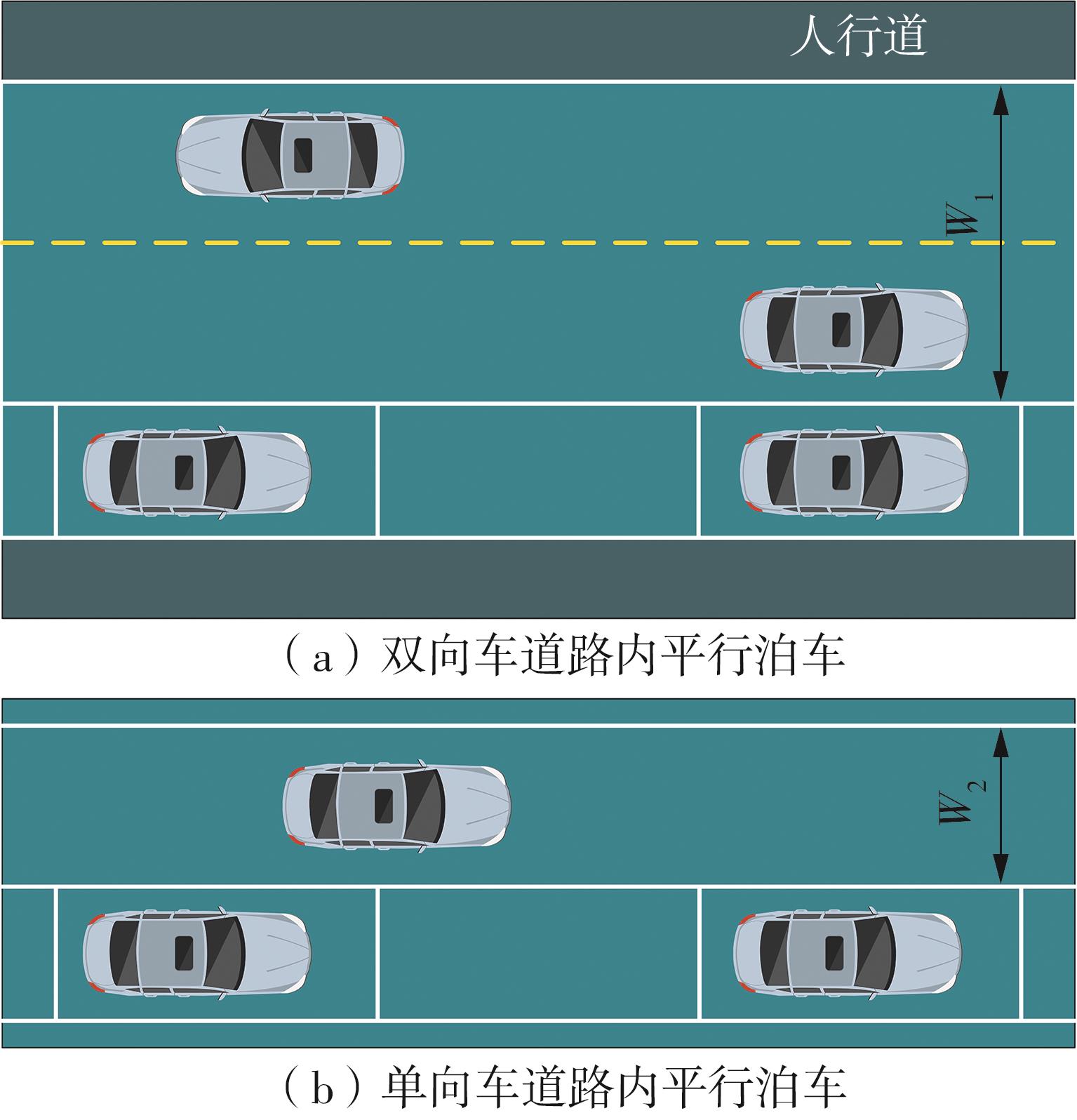
Fig.2
Vehicle kinematics model"

Fig.3
Parallel parking path planning"
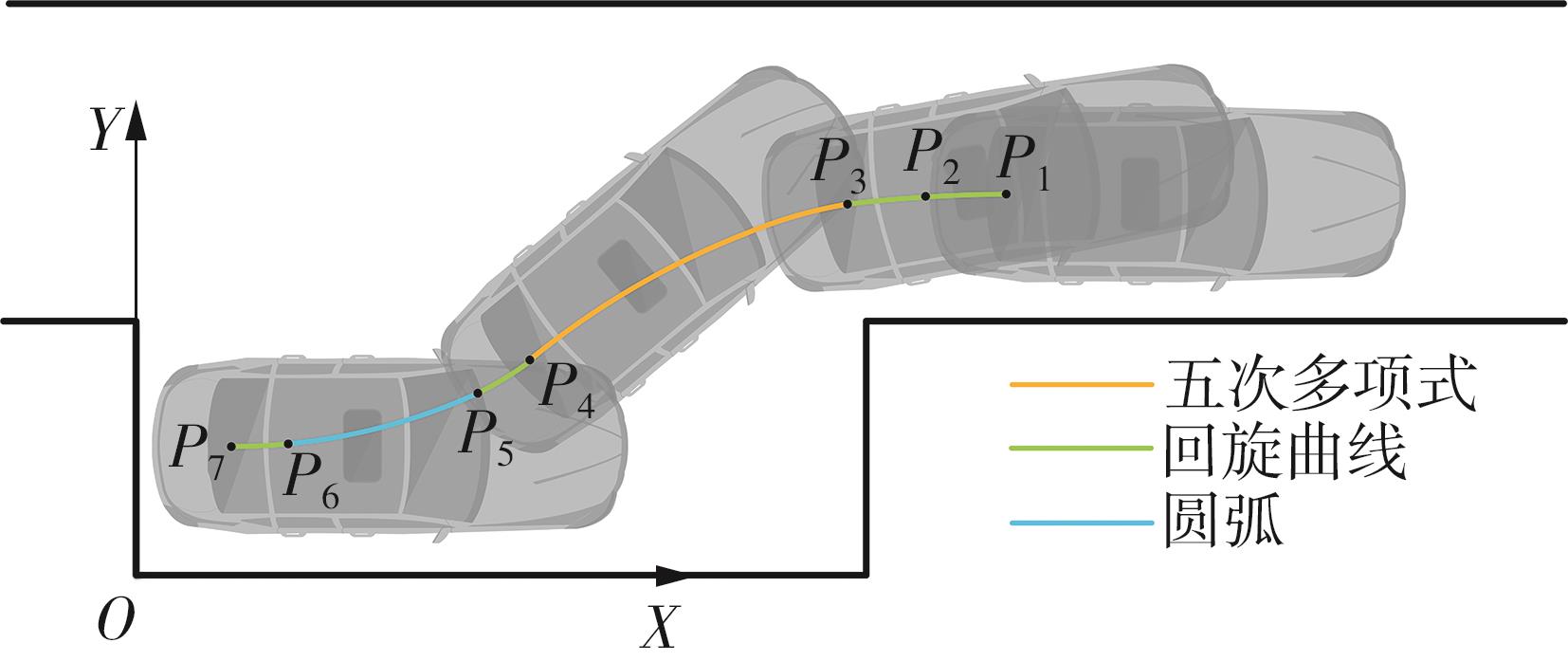
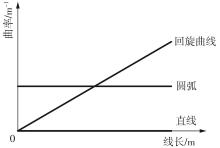
Fig.4
Curvatures of lines, arcs and clothoid curves"
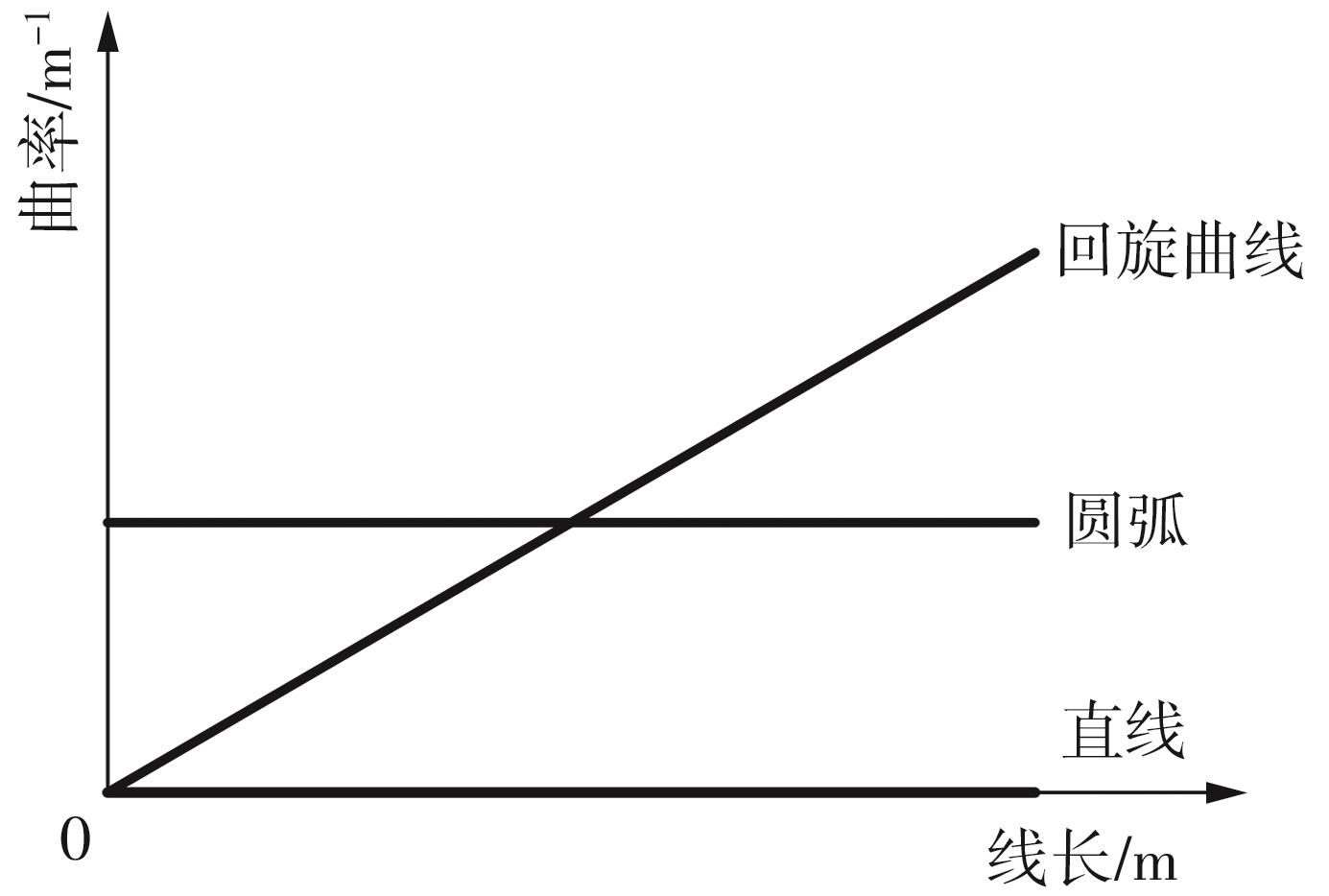
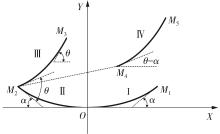
Fig.5
Construction principle of curves"
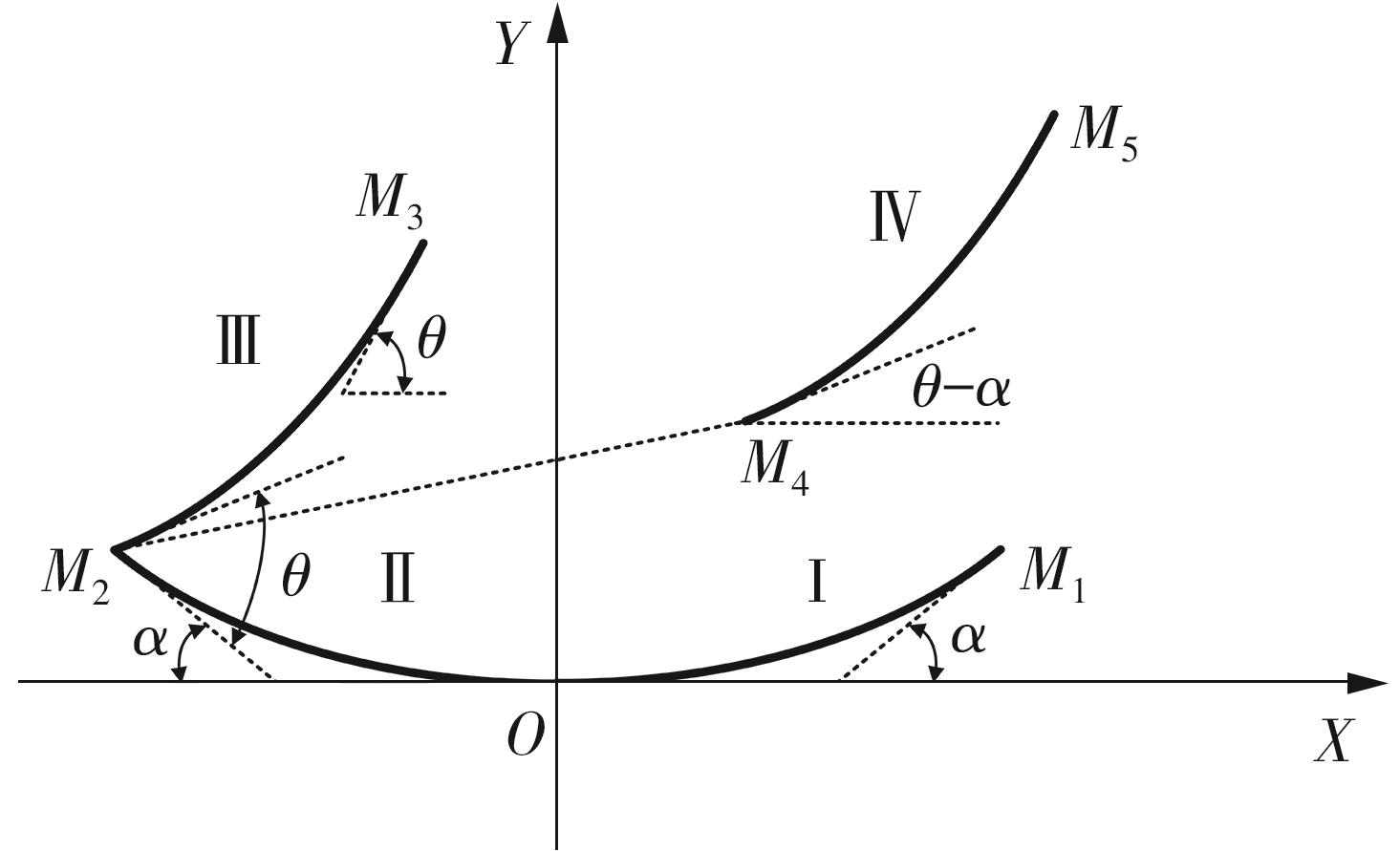
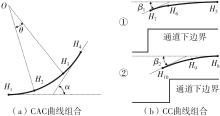
Fig.6
Curve combination"
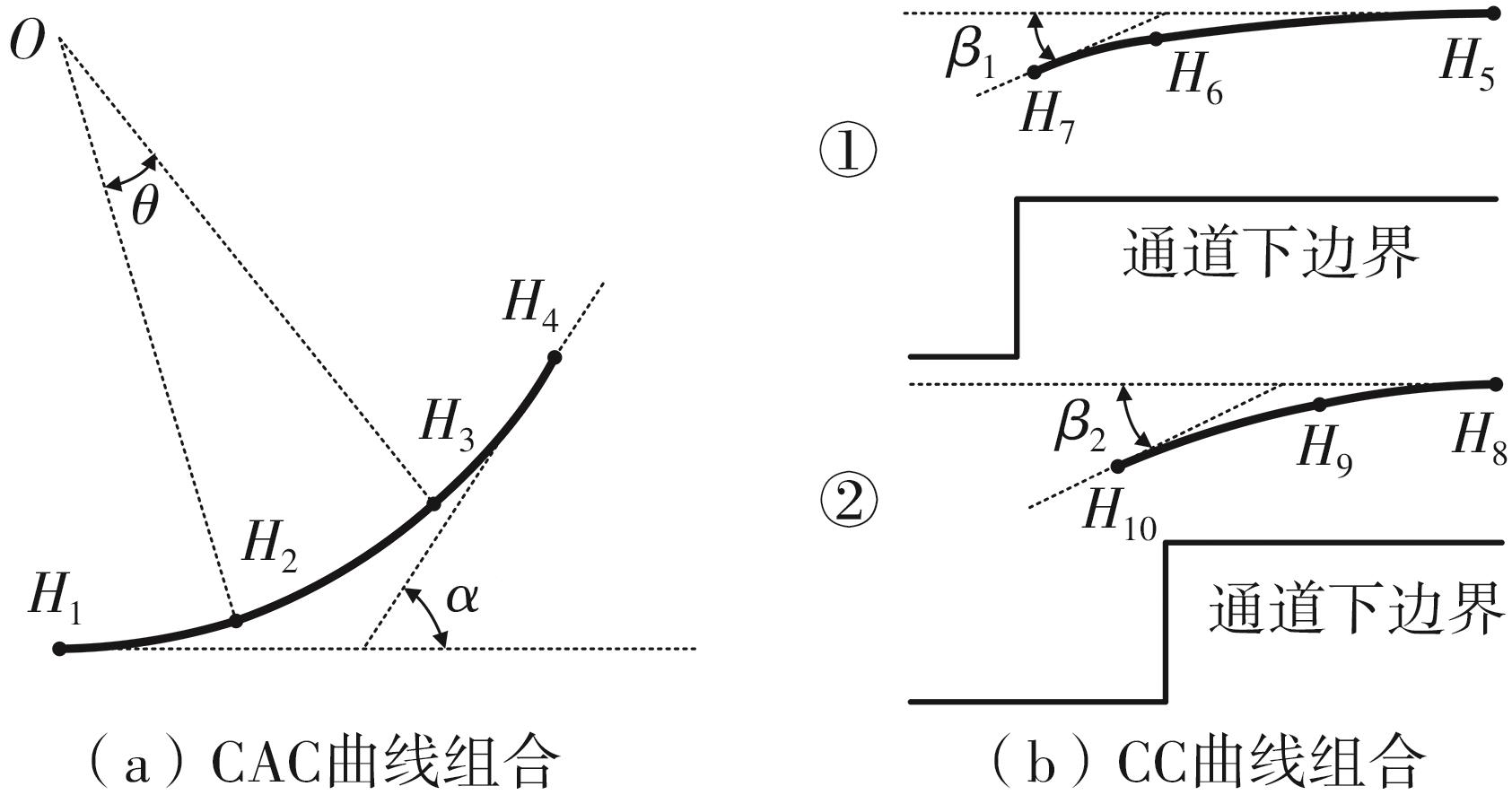
Fig.7
Parking space model"
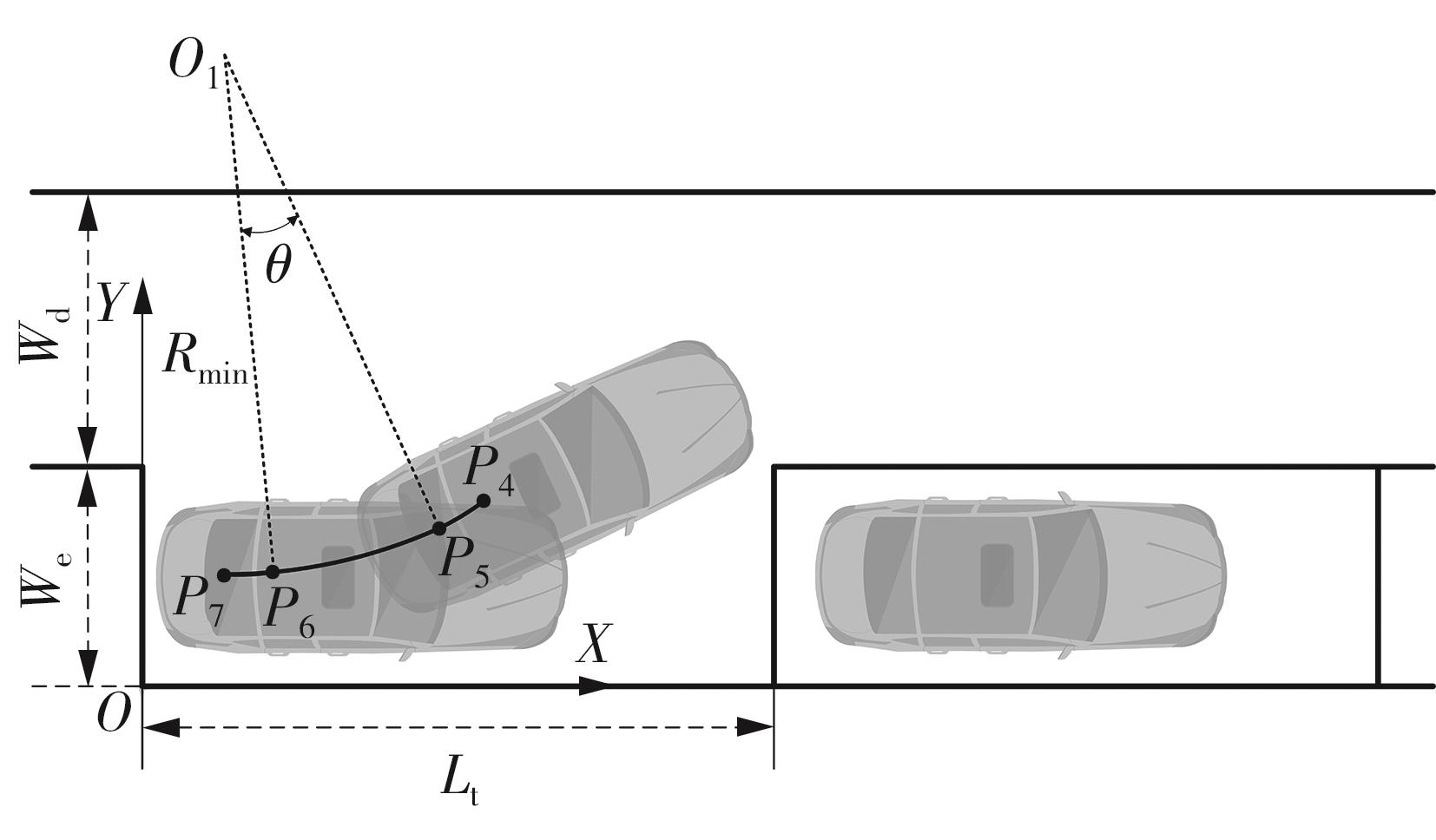

Fig.8
Parking starting point"
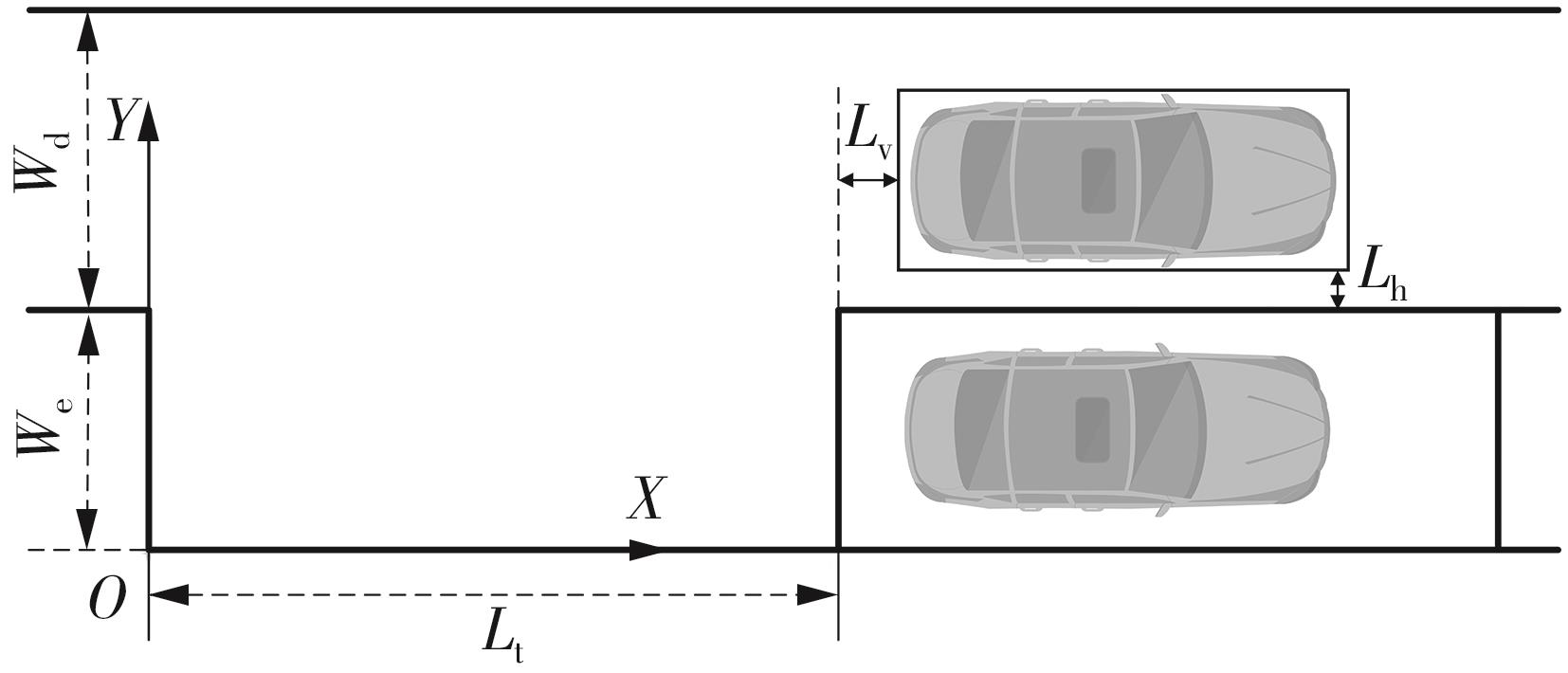
Table 1
Description of solving parameters of a quintic polynomial"
| 参数 | 描述 |
|---|---|
| 点P3和P4的坐标 | 起终点后轴中心位置 |
| 点P3和P4的一阶导数 | 起终点车辆的航向角 |
| 点P3和P4的二阶导数 | 起终点等效前轮转角 |
Table 2
Vehicle parameters"
| 参数 | 数值 |
|---|---|
| 车辆宽度W/m | 1.645 |
| 轴距L/m | 2.405 |
| 前悬长度Lf/m | 0.800 |
| 后悬长度Lr/m | 0.950 |
| 最大等效前轮转角δmax/rad | 0.520 |
| 最大前轮转向角速度ωmax/(rad·s-1) | 0.520 |
| 最小转弯半径Rmin/m | 4.200 |

Fig.9
Parking paths and their curvatures obtained by the proposed method"
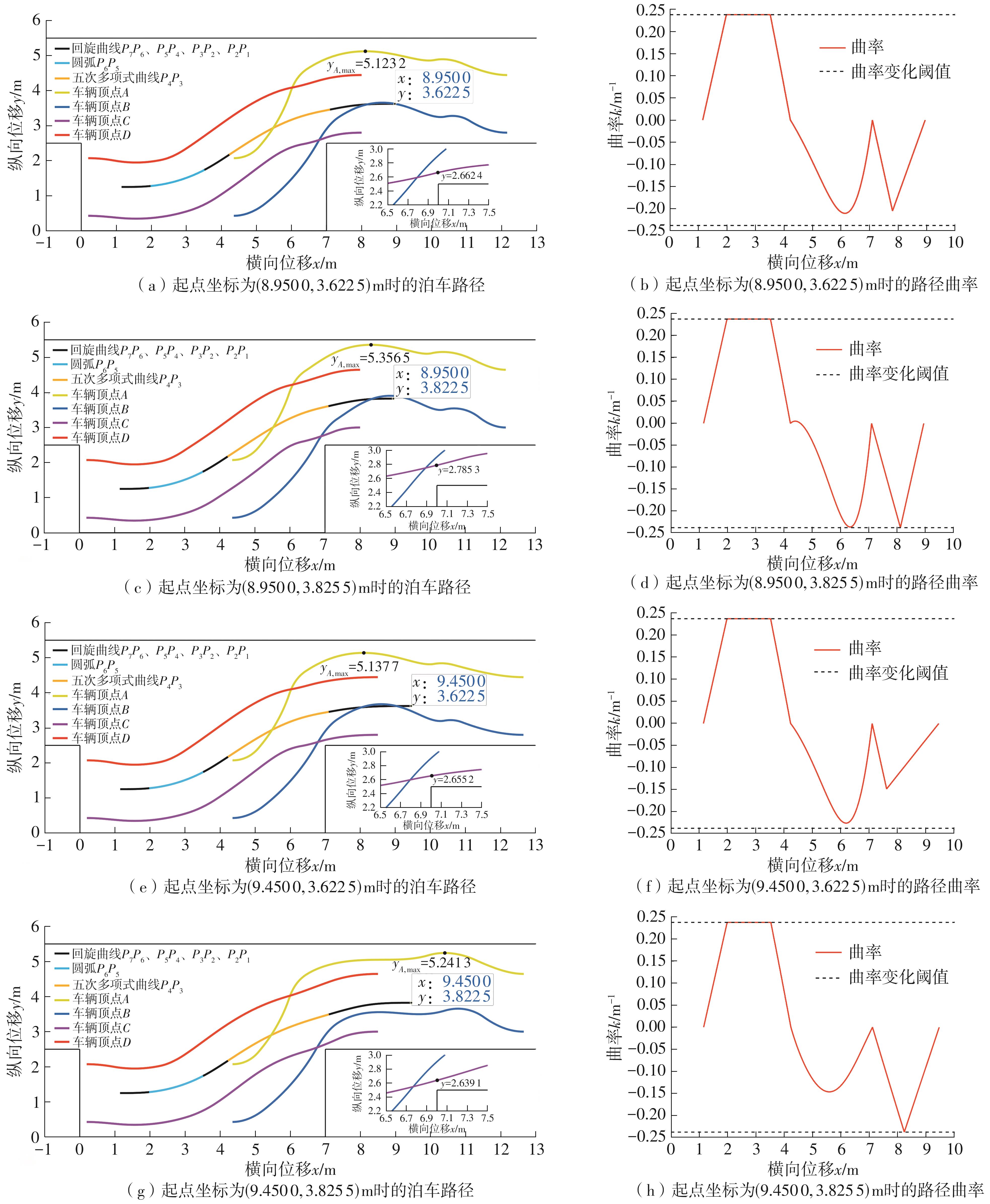
Table 3
Solution parameters of path planning"
| 起点坐标/m | C12/m-2 | C23/m-2 | ||
|---|---|---|---|---|
| (8.950 0,3.622 5) | 0.179 1 | 0.287 1 | 0.205 3 | 5.123 2 |
| (8.950 0,3.825 5) | 0.287 1 | 0.229 1 | 0.238 1 | 5.356 5 |
| (9.450 0,3.622 5) | 0.080 7 | 0.287 1 | 0.148 7 | 5.137 7 |
| (9.450 0,3.825 5) | 0.193 2 | 0.206 4 | 0.238 1 | 5.241 3 |

Fig.10
Parking paths and their curvatures obtained by the comparison methods"
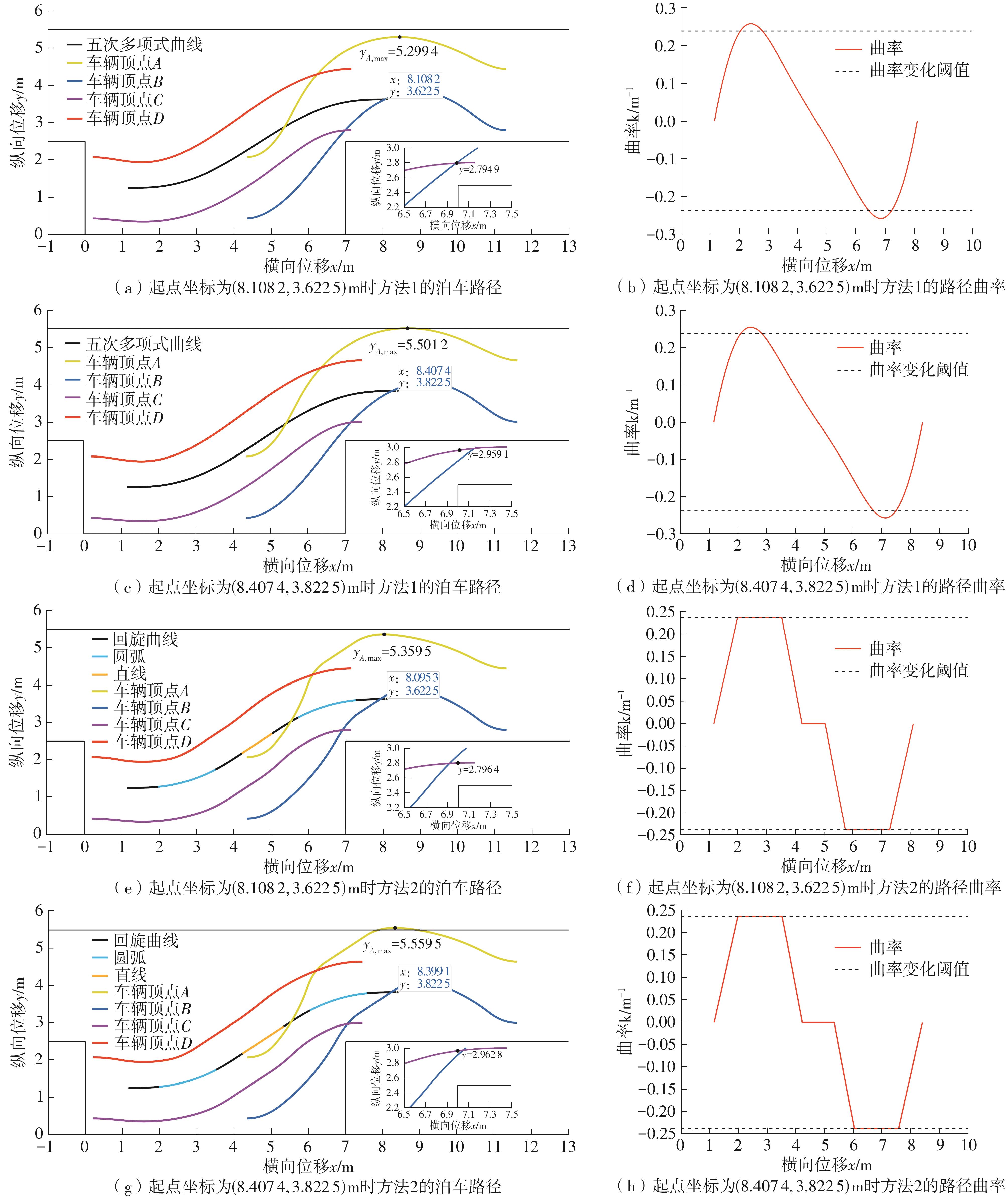
Table 4
Parking conditions of the comparison methods"
| 方法 | 起点坐标/m | 是否满足碰撞约束 | 是否满足曲率约束 | |
|---|---|---|---|---|
| 方法1 | (8.108 2,3.622 5) | 是 | 否 | 5.299 4 |
| (8.407 4,3.822 5) | 否 | 否 | 5.501 2 | |
| 方法2 | (8.108 2,3.622 5) | 是 | 是 | 5.362 5 |
| (8.407 4,3.822 5) | 否 | 是 | 5.559 5 |
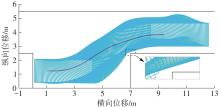
Fig.11
Outer contour envelope of the car"
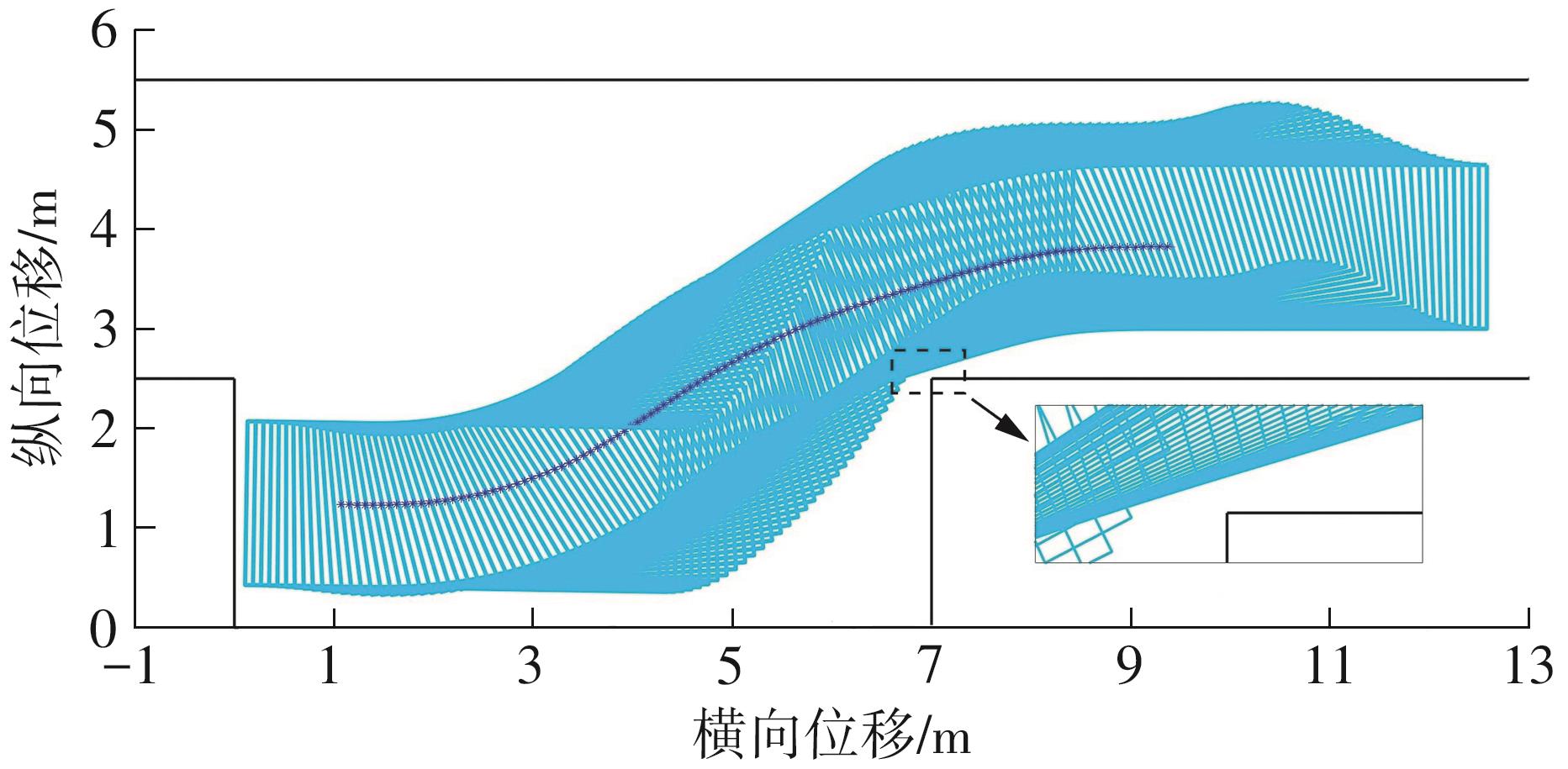
Fig.12
Path tracking effect"
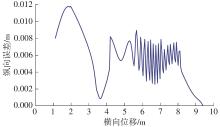
Fig.13
Longitudinal error of the car"
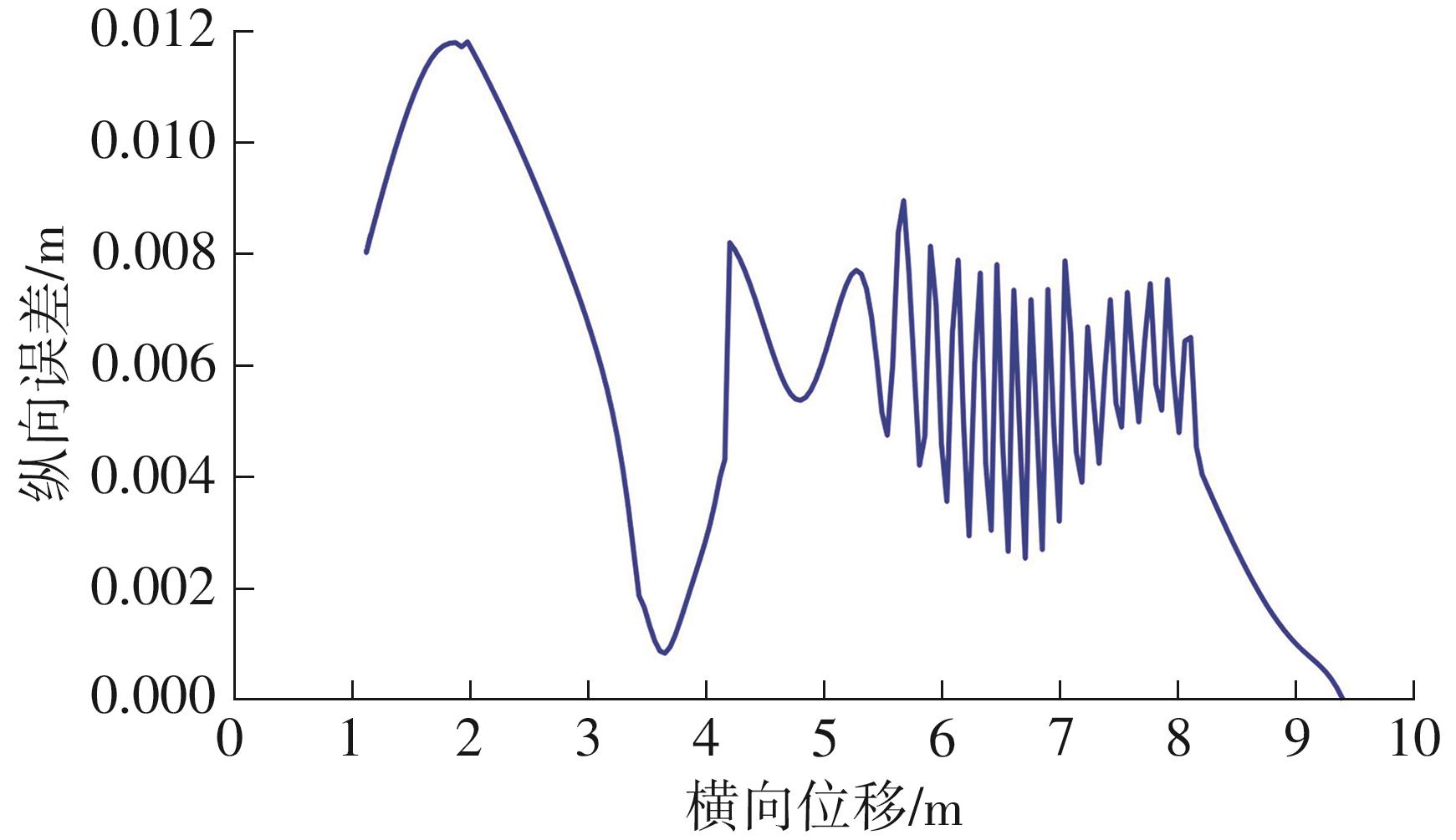
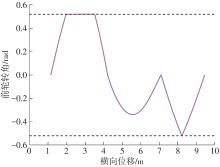
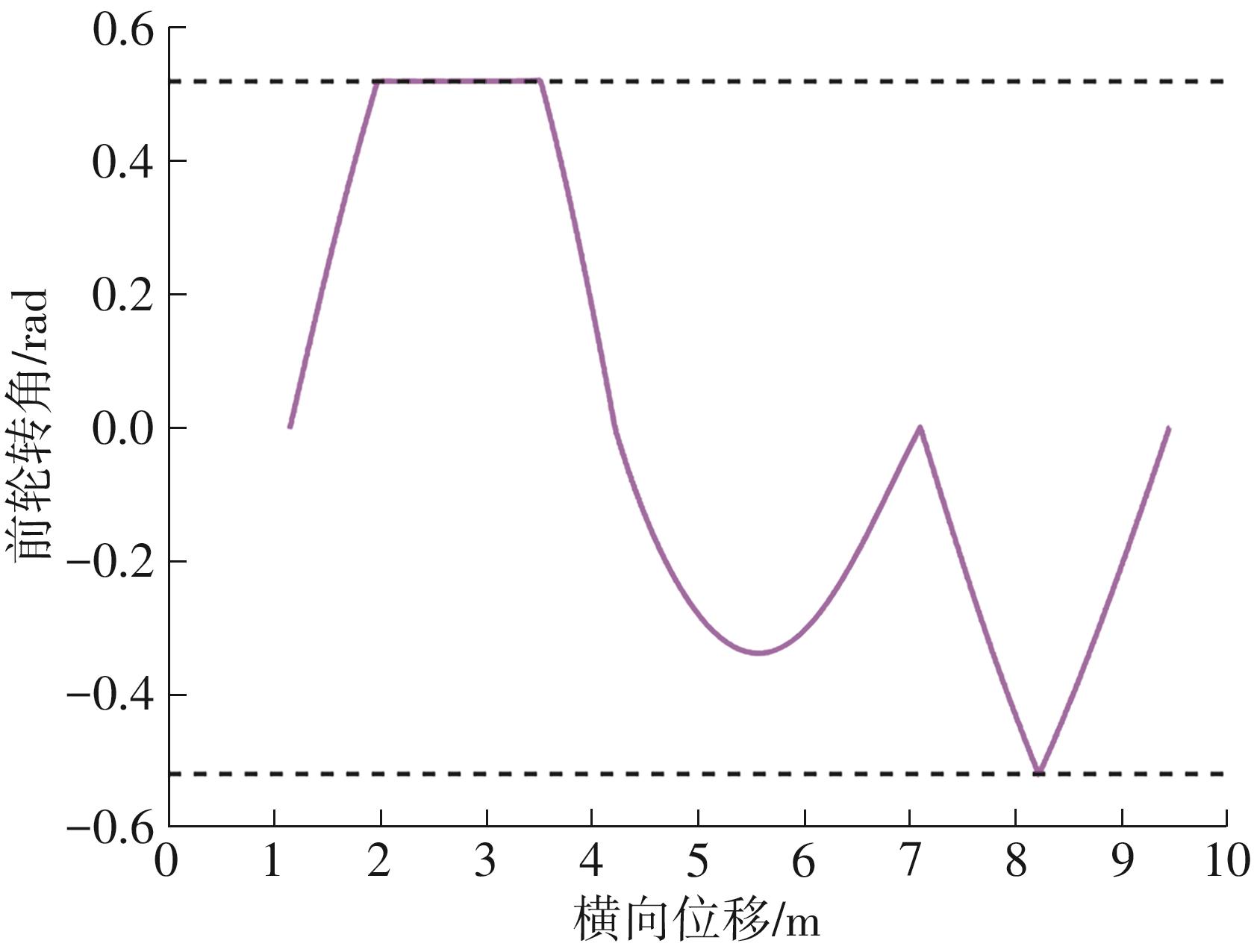
Fig.14
Front wheel angle of the car"
| [1] | 张家旭,赵健,施正堂,等 .基于回旋曲线的平行泊车路径规划和跟踪控制[J].吉林大学学报(工学版),2020,50(6):2247-2257. |
| ZHANG Jia-xu, ZHAO Jian, SHI Zheng-tang,et al .Path planning and tracking control for parallel parking based on clothoid curve[J].Journal of Jilin University (Engineering and Technology Edition),2020,50(6):2247-2257. | |
| [2] | YU L, CAI Y, FENG X,et al .Parallel parking path planning and tracking control based on simulated annealing algorithm[J].International Journal of Automotive Technology,2024,25(4):867-880. |
| [3] | CAI L, GUAN H, ZHOU Z,et al .Parking planning under limited parking corridor space[J].IEEE Transactions on Intelligent Transportation Systems,2023,24(2):1962-1981. |
| [4] | 胡杰,朱令磊,陈瑞楠,等 .狭小车位平行泊车路径规划方法研究[J].汽车工程,2022,44(7):1040-1048. |
| HU Jie, ZHU Linglei, CHEN Ruinan,et al .Research on parallel parking path planning method for narrow parking space[J].Automotive Engineering,2022,44(7):1040-1048. | |
| [5] | 刘平,陈卓,刘明杰,等 .阶段约束下Gauss配点离散化平行车位自动泊车轨迹规划[J].汽车工程,2023,45(7):1163-1173. |
| LIU Ping, CHEN Zhuo, LIU Mingjie,et al .Gauss allocation points parameterization parallel automatic parking trajectory planning for vehicle under multi-stage constraints[J].Automotive Engineering,2023,45(7):1163-1173. | |
| [6] | 陈晓明,李柏,范丽丽,等 .基于半空间约束理论的自动泊车高性能轨迹优化方法[J].机械工程学报,2024,60(10):273-288. |
| CHEN Xiaoming, LI Bai, FAN Lili,et al .High-performance trajectory optimization for automated parking via half-space constraining theory[J].Journal of Mechanical Engineering,2024,60(10):273-288. | |
| [7] | 秦东晨,张文灿,王婷婷,等 .受限泊车通道下自动驾驶平行泊车的路径规划方法[J].郑州大学学报(工学版),2024,45(5):1-7. |
| QING Dongchen, ZHANG Wencan, WANG Tingting,et al .Path planning method for automated parallel parking in restricted parking lanes[J].Journal of Zhengzhou University (Engineering Science),2024,45(5):1-7. | |
| [8] | 任秉韬,王淅淅,邓伟文,等 .基于混合A*和可变半径RS曲线的自动泊车路径优化方法[J].中国公路学报,2022,35(7):317-327. |
| REN Bing-tao, WANG Xi-xi, DENG Wei-wen,et al .Path optimization algorithm for automatic parking based on hybrid A* and Reeds-Shepp curve with variable radius[J].China Journal of Highway and Transport,2022,35(7):317-327. | |
| [9] | 曹彦博,颜京才,李旭升,等 .基于改进混合A*算法的自动泊车系统路径搜索方法[J].汽车技术,2023(6):37-41. |
| CAO Yanbo, YAN Jingcai, LI Xusheng,et al .A method of path search for automatic parking system based on improved hybrid A* algorithm[J].Automobile Technology,2023(6):37-41. | |
| [10] | 胡杰,张敏超,徐文才,等 .自动驾驶车辆的平行泊车轨迹规划[J].汽车工程,2022,44(3):330-339. |
| HU Jie, ZHANG Minchao, XU Wencai,et al .Parallel parking trajectory planning for autonomous vehicles[J].Automotive Engineering,2022,44(3):330-339. | |
| [11] | 姚智龙,张小俊,王金刚 .改进Bi-RRT*算法的自动泊车路径规划[J].机械科学与技术,2024,43(6):1063-1071. |
| YAO Zhilong, ZHANG Xiaojun, WANG Jingang .Automatic parking path planning with improved Bi-RRT* algorithm[J].Mechanical Science and Technology for Aerospace Engineering,2024,43(6):1063-1071. | |
| [12] | 张家旭,刘晔,郭崇,等 .基于批处理先验知识树的自主代客泊车路径规划[J].华中科技大学学报(自然科学版),2021,49(9):77-82. |
| ZHANG Jiaxu, LIU Ye, GUO Chong,et al .Autonomous valet parking path planning based on batch informed tree[J].Journal of Huazhong University of Science and Technology (Nature Science Edition),2021,49(9):77-82. | |
| [13] | SUN Hongwei, CHEN Hui, SONG Shaoyu .A motion planning method based on reinforcement learning for automatic parallel parking in small slot[J].Automobile Technology,2021(9):17-26. |
| 孙宏伟,陈慧,宋绍禹 .一种基于强化学习的小库位自动平行泊车运动规划方法[J].汽车技术,2021(9):17-26. | |
| [14] | ZHANG J, CHEN H, SONG S,et al .Reinforcement learning-based motion planning for automatic parking system[J].IEEE Access,2020,8:154485-154501. |
| [15] | CHAI R, LIU D, LIU T,et al .Deep learning-based trajectory planning and control for autonomous ground vehicle parking maneuver[J].IEEE Transactions on Automation Science and Engineering,2023,20(3):1633-1647. |
| [16] | 程国柱,冯思鹤,冯天军 .占用车行道的路内停车泊位设置条件[J].吉林大学学报(工学版),2019,49(6):1858-1864. |
| CHENG Guo-zhu, FENG Si-he, FENG Tian-jun .Setting condition of on-street parking space occupied vehicle lane[J].Journal of Jilin University (Engineering and Technology Edition),2019,49(6):1858-1864. |
| [1] | DONG Min, LAI Youcheng, BI Sheng. Target Navigation Method Based on Multimodal Scene Memory and Instruction Prompting [J]. Journal of South China University of Technology(Natural Science Edition), 2026, 54(2): 1-15. |
| [2] | PEI Mingyang, SHAO Kangshun, LI Linqing, XU Fengjuan. Modeling Methodologies for Unmanned Aerial Vehicle Path Planning in Emergency Rescue: A Comprehensive Review and Prospect [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(12): 17-33. |
| [3] | YAO Daojin, YIN Xiong, LUO Zhen, et al. AGVS Path Planning Algorithm in Complex Environments [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 56-62. |
| [4] | WEN Huiying, YUAN Yuqing, LIN Yifeng. Conflict-Free Path Planning For Multi-AGVs in Automated Terminals Considering Road Load Balancing [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(10): 1-10. |
| [5] | WEI Wu, HAN Jin, LI Yanjie, et al. Path Planning of Mobile Robots Based on Dual-Tree Quick-RRT* Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(7): 51-58. |
| [6] | WEN Huiying, LIN Yifeng, WU Haoshu, et al. Extended Co-evolutionary Algorithm for Path Planning Based on the Urban Traffic Environment Evolution [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(10): 1-10. |
| [7] | ZHANG Jiaxu, YANG Xiong, SHI Zhengtang, et al. Path Planning and Tracking Control for Emergency Lane Change and Obstacle Avoidance of Vehicles [J]. Journal of South China University of Technology(Natural Science Edition), 2020, 48(9): 86-93,106. |
| [8] | ZHAO Xing JI Kang LIN Hao XU Peng. Resource Allocation Model Based on Multi-objective Path Planning in Emergency Management [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(4): 76-82. |
| [9] | HONG Xiaobin WEI Xinyong HUANG Yesheng LIU Yanxia XIAO Guoquan. Local Path Planning Method for Unmanned Surface Vehicle Based on Image Recognition and VFH + [J]. Journal of South China University of Technology(Natural Science Edition), 2019, 47(10): 24-33. |
| [10] | PAN Xiao-fang ZHOU Shun-ping YANG Lin WAN Bo. Origin Destination Constraint Experience Model of Taxi and Path Planning [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(8): 57-64,83. |
| [11] | WU Yu-xiang WANG Chao. An Improved Three-Dimensional Path Planning Method of Mobile Robot [J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(9): 53-60. |
| [12] | Wang Fu-yuan Xu Jia-wen. Process and Key Technologies of NC Electrochemical Machining of Integral Impeller via Fractional-Step Method [J]. Journal of South China University of Technology (Natural Science Edition), 2010, 38(8): 72-77. |
| [13] | Zhao Dong Zheng Shi-xiong. Multi-Robot Collision Avoidance Algorithm Based on Generalized Potential Field [J]. Journal of South China University of Technology (Natural Science Edition), 2010, 38(1): 124-127. |
| [14] | Yang Chun Deng Fei-qi Yang Hai-dong . Quantum-Inspired Evolutionary Algorithm to Solve Multi-Objective Numerical Optimization Problems [J]. Journal of South China University of Technology (Natural Science Edition), 2009, 37(1): 79-85. |
| [15] | Chen Huazhi Xie Cunxi Zeng Dehuai. Simulation of a Neural Network-based Path Planning Algorithm for Mobile Robot [J]. Journal of South China University of Technology(Natural Science Edition), 2003, 31(6): 56-59. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||