Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (11): 37-51.doi: 10.12141/j.issn.1000-565X.250072
• Computer Science & Technology • Previous Articles Next Articles
3D Hand Pose Estimation with Multimodal Feature Fusion Guided by Depth Geometric Features
GUAN Xin, LIU Chenxi, LI Qiang
- School of Microelectronics,Tianjin University,Tianjin 300072,China
-
Received:2025-03-18Online:2025-11-25Published:2025-05-23 -
About author:关欣(1977—),女,博士,副教授,主要从事智能图像处理、音乐信号处理研究。E-mail: guanxin@tju.edu.cn -
Supported by:the Natural Science Foundation of Tianjin,China(23JCZDJC00020)
CLC Number:
Cite this article
GUAN Xin, LIU Chenxi, LI Qiang. 3D Hand Pose Estimation with Multimodal Feature Fusion Guided by Depth Geometric Features[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(11): 37-51.
share this article
Fig.1
Architecture of depth geometric feature-guided multimodal 3D hand pose estimation network"
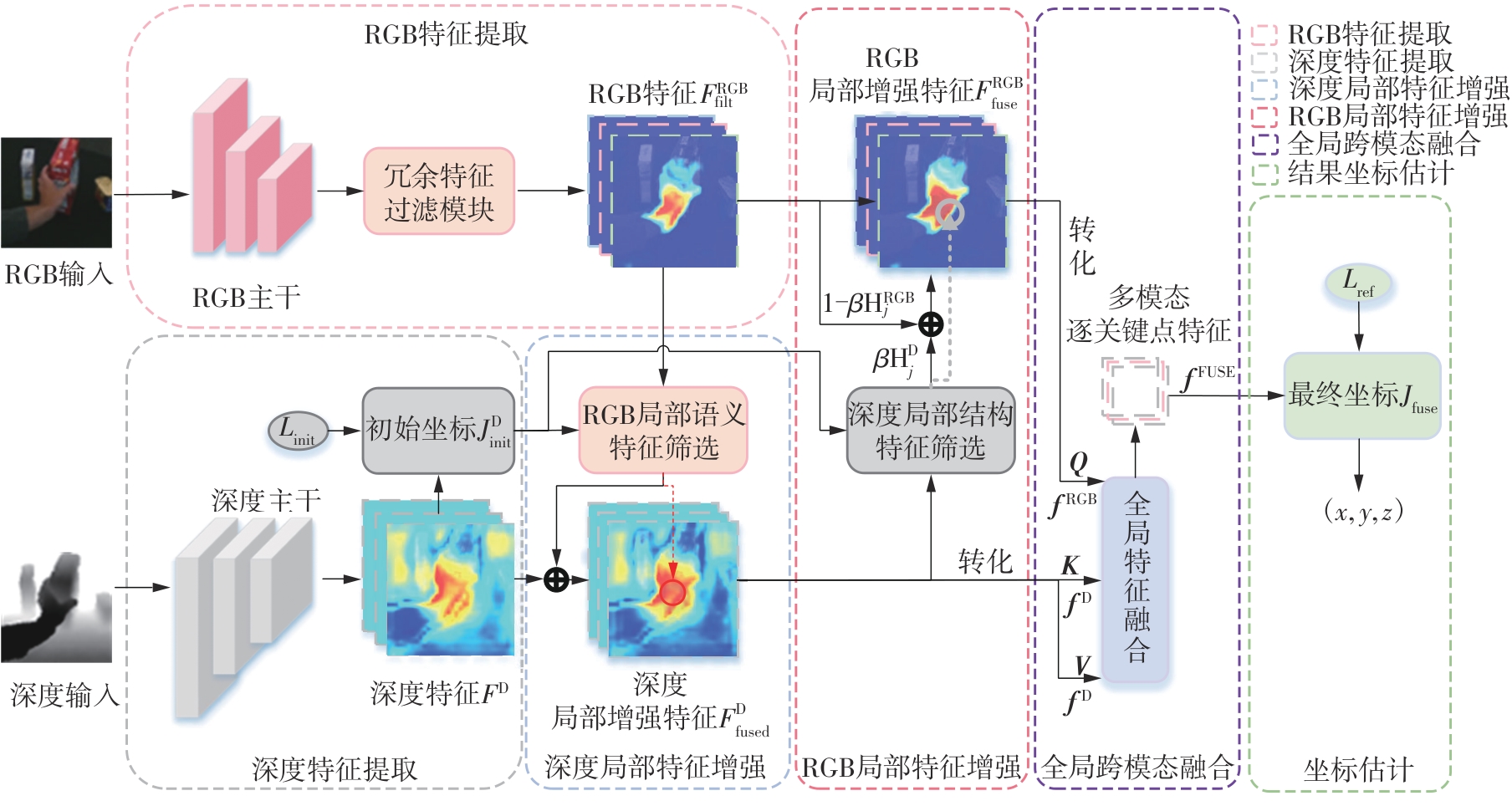

Fig.2
Removal module of RGB redundant background"
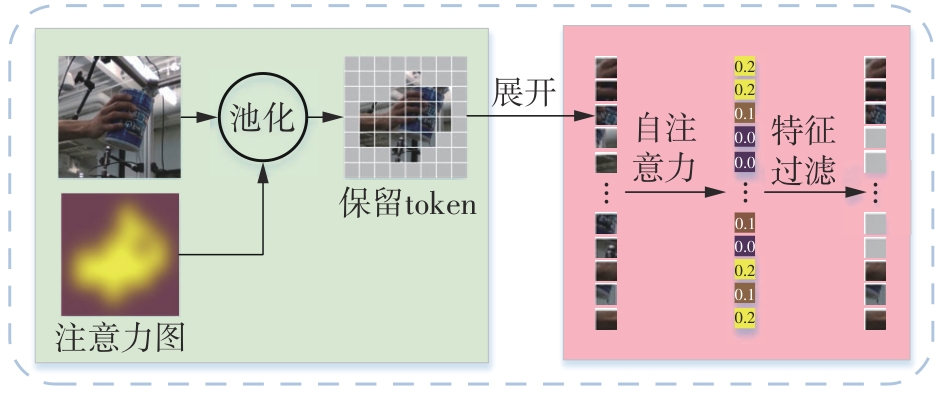
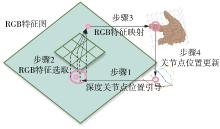
Fig.3
Depth feature enhancement process"
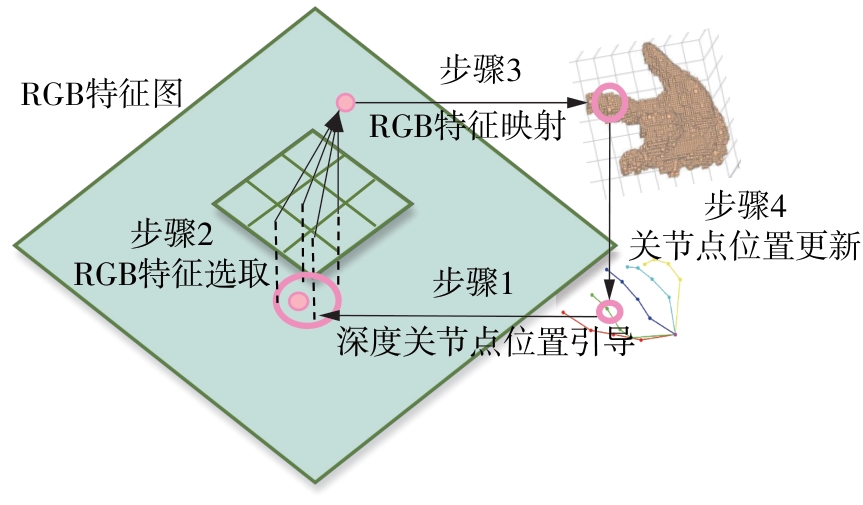
Fig.4
Global cross-modal fusion module"
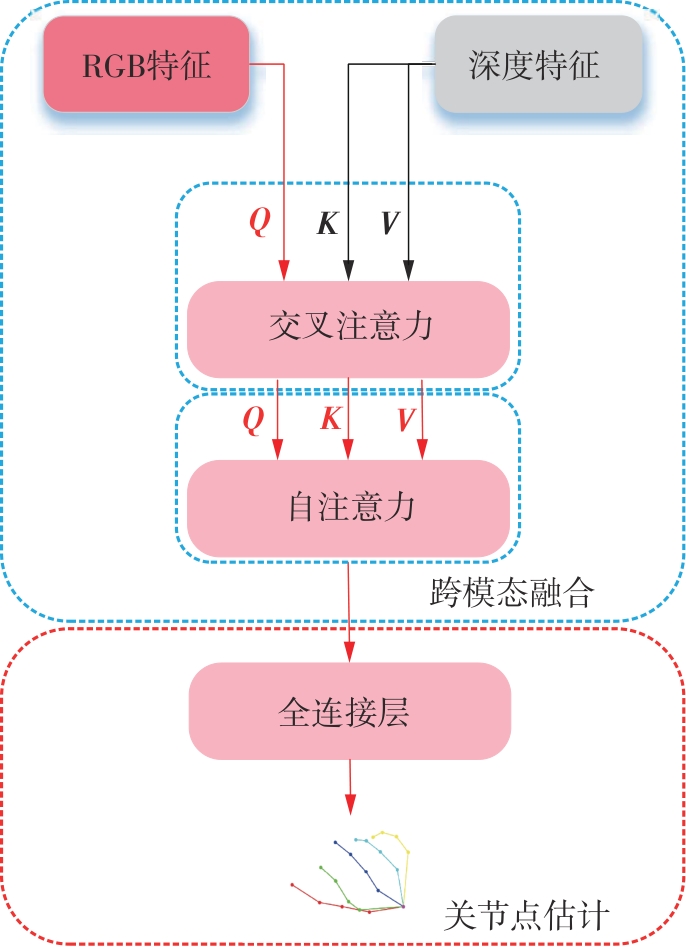
Table 1
Comparison of the proposed method with other state-of-the-art methods on DexYCB dataset"
| 方法 | 输入数据 | Backbone | 推理时间/ms | 参数量/106 | MPJPE/mm | PA-MPJPE/mm |
|---|---|---|---|---|---|---|
| AWR[ | Depth | Hourglass | 10.26 | 8.70 | 11.23 | — |
| A2J[20] | Depth | ResNet-50 | 105.06 | 14.42 | 23.93 | — |
| A2Jformer[ | RGB | ResNet-50 | 49.60 | 18.84 | 13.56 | 5.80 |
| Deformer[ | RGB | Transformer | 24.81 | 42.00 | 9.40 | — |
| 文献[ | RGB | Transformer | 22.37 | 50.40 | 11.81 | 5.14 |
| 文献[ | RGB | Hourglass | 19.16 | 18.82 | 8.90 | 4.98 |
| IPNet[ | D&PCL | ResNet-18 | 10.60 | 30.46 | 8.03 | — |
| BasicFusion[ | RGB-D | ResNet-18 | 18.82 | 24.26 | 10.22 | — |
| AWR+ACNet[ | RGB-D | Hourglass | 16.19 | 13.44 | 9.97 | — |
| SA-Fusion[ | RGB-D | ResNet-50 | 17.54 | 34.58 | 9.51 | — |
| DiffHand[ | RGB-D | Transformer | 27.44 | 96.64 | 12.10 | 4.98 |
| 文献[ | RGB-D | ResNet-50 | 27.50 | 63.20 | 9.44 | 4.96 |
| 文中方法a | RGB-D | ResNet-18 | 10.46 | 24.96 | 10.46 | 5.50 |
| 文中方法b | RGB-D | ResNet-50 | 19.56 | 51.54 | 9.36 | 5.26 |
| 文中方法c | RGB-D | Hourglass | 18.38 | 22.84 | 8.27 | 4.92 |
| 文中方法d | RGB-D | Transformer | 28.64 | 104.78 | 7.52 | 4.80 |
Table 2
Comparison of the proposed method with other state-of-the-art methods on HO-3D dataset"
| 方法 | 输入数据 | Backbone | 推理时间/ms | 参数量/106 | MPJPE/mm | PA-MPJPE/mm |
|---|---|---|---|---|---|---|
| HandOccNet[ | RGB | ResNet-50 | 28.84 | 49.65 | 2.49 | 2.40 |
| 文献[ | RGB | ResNet-18 | 12.58 | 22.68 | 5.52 | 3.18 |
| 文献[ | RGB | Transformer | 24.81 | 42.00 | 3.24 | 2.74 |
| 文献[ | RGB | Hourglass | 19.16 | 18.82 | 2.87 | 2.66 |
| IPNet[ | D&PCL | ResNet-18 | 10.24 | 30.46 | 1.81 | 2.01 |
| DiffHand[ | RGB-D | Transformer | 27.44 | 95.47 | 2.37 | — |
| 文献[ | RGB-D | ResNet-50 | 27.50 | 63.20 | 1.92 | 2.08 |
| 文中方法a | RGB-D | ResNet-18 | 10.26 | 24.25 | 1.86 | 2.06 |
| 文中方法b | RGB-D | ResNet-50 | 19.56 | 50.28 | 1.94 | 2.14 |
| 文中方法c | RGB-D | Transformer | 26.14 | 101.62 | 1.80 | 1.95 |
Table 3
Comparison of the proposed method with other state-of-the-art methods on InterHand2.6M dataset"
| 方法 | MPJPE/mm | ||
|---|---|---|---|
| 单手 | 双手 | 总体 | |
| InterNet[ | 12.16 | 16.02 | 10.60 |
| 文献[ | 11.32 | 15.57 | 14.12 |
| 文献[ | 11.08 | 15.33 | 13.41 |
| IPNet[ | 10.97 | 14.82 | 12.66 |
| A2J-Transformer[ | 8.10 | 10.96 | 9.63 |
| 文献[ | 10.99 | 14.34 | 12.78 |
| 文献[ | 7.42 | 9.86 | 9.30 |
| 文献[ | 7.56 | 9.88 | 9.78 |
| 文中方法 | 7.40 | 10.84 | 9.86 |
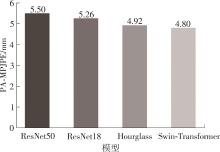
Fig.5
Results of ablation experiments on Backbone selection"
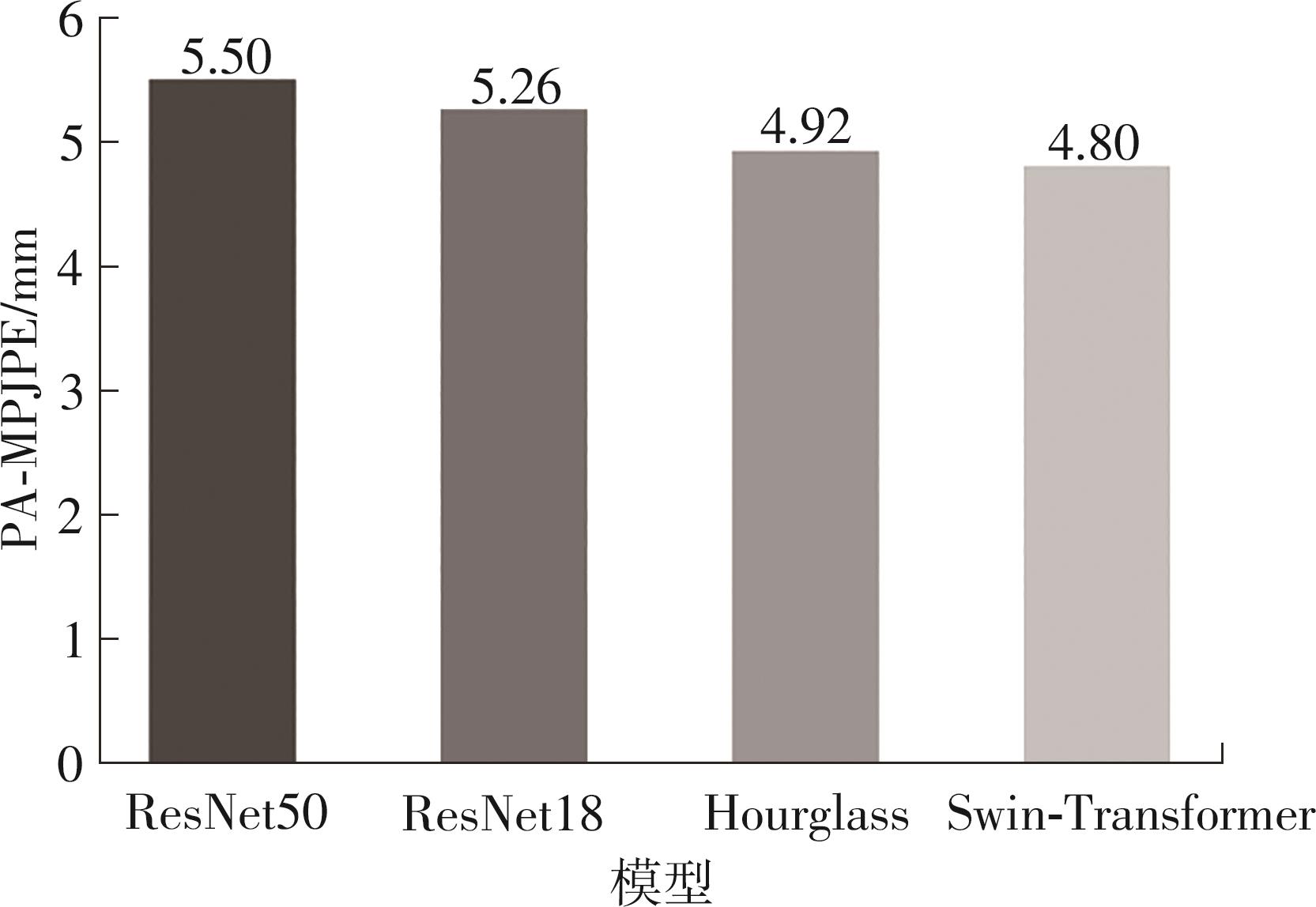
Table 4
Results of ablation experiments on the local feature enhancement"
| 模型1) | RGB特征增强 | 深度特征增强 | MPJPE/mm |
|---|---|---|---|
| A | 10.60 | ||
| B | √ | 8.17 | |
| C | √ | 8.09 | |
| D | √ | √ | 7.52 |
Table 5
Results of ablation experiments on the necessity of depth-guided fusion"
| 模型1) | RGB特征过滤 | 深度特征引导 | RGB特征引导 | PA-MPJPE/mm |
|---|---|---|---|---|
| 1 | 5.12 | |||
| 2 | √ | 5.05 | ||
| 3 | √ | √ | 4.93 | |
| 4 | √ | √ | 4.80 |
Table 6
Results of hyperparameter analysis experiments for the local depth feature enhancement module"
| K | MPJPE/mm | PA-MPJPE/mm |
|---|---|---|
| 0 | 8.17 | 5.25 |
| 2 | 7.96 | 5.14 |
| 4 | 7.52 | 4.80 |
| 8 | 7.64 | 4.85 |
| 16 | 7.76 | 4.95 |
Table 7
Results of hyperparameter analysis experiments for the local RGB feature enhancement module"
| β | MPJPE/mm | PA-MPJPE/mm |
|---|---|---|
| 0.0 | 8.09 | 5.17 |
| 0.1 | 7.55 | 4.82 |
| 0.2 | 7.73 | 4.92 |
| 0.3 | 7.86 | 5.12 |
| 0.4 | 8.14 | 5.18 |
| 0.5 | 8.53 | 5.23 |
Fig.6
Experimental results obtained on DexYCB dataset at different retention number and retention rate"
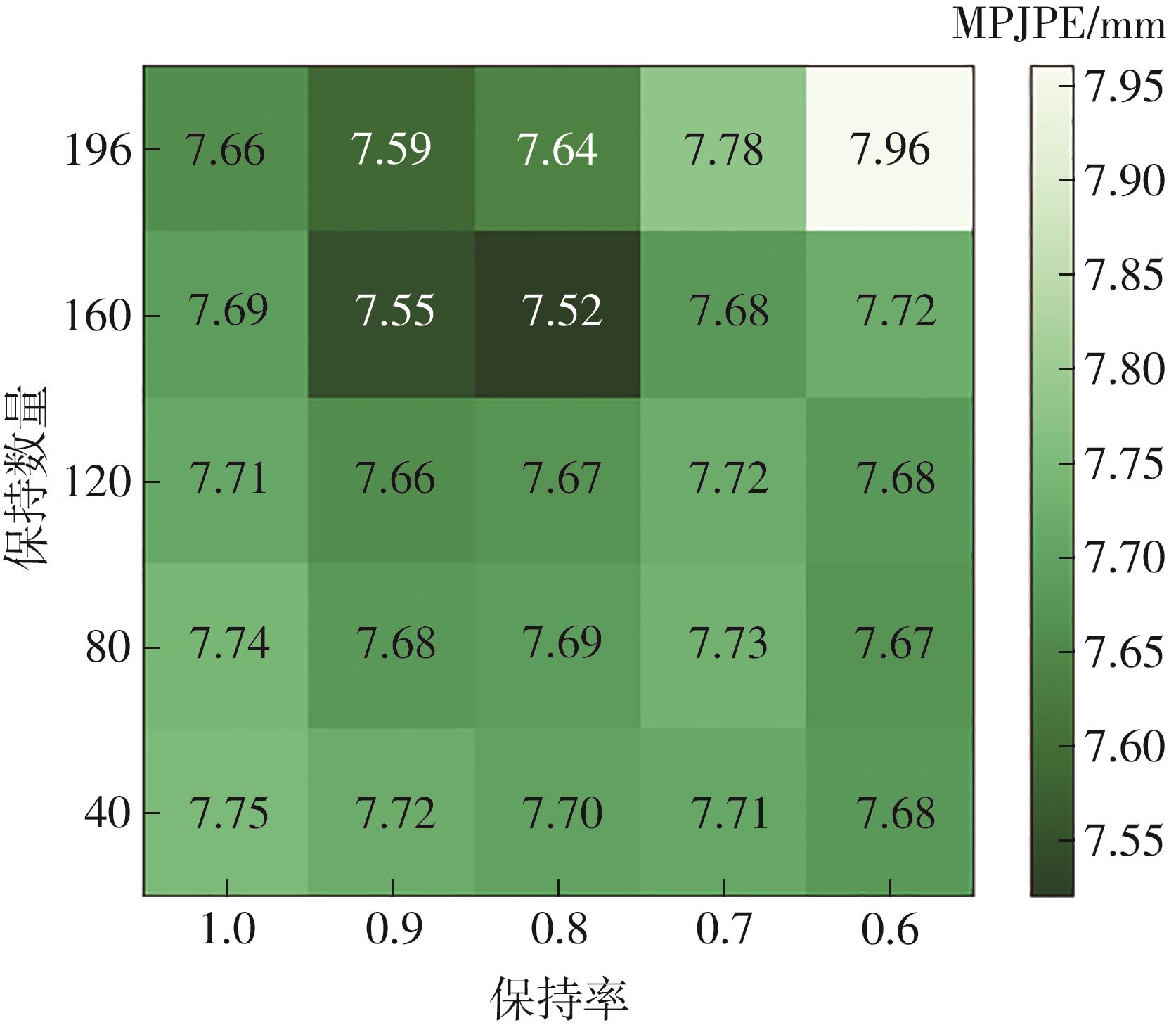
Fig.7
Experimental results obtained on HO-3D dataset at different retention number and retention rate"
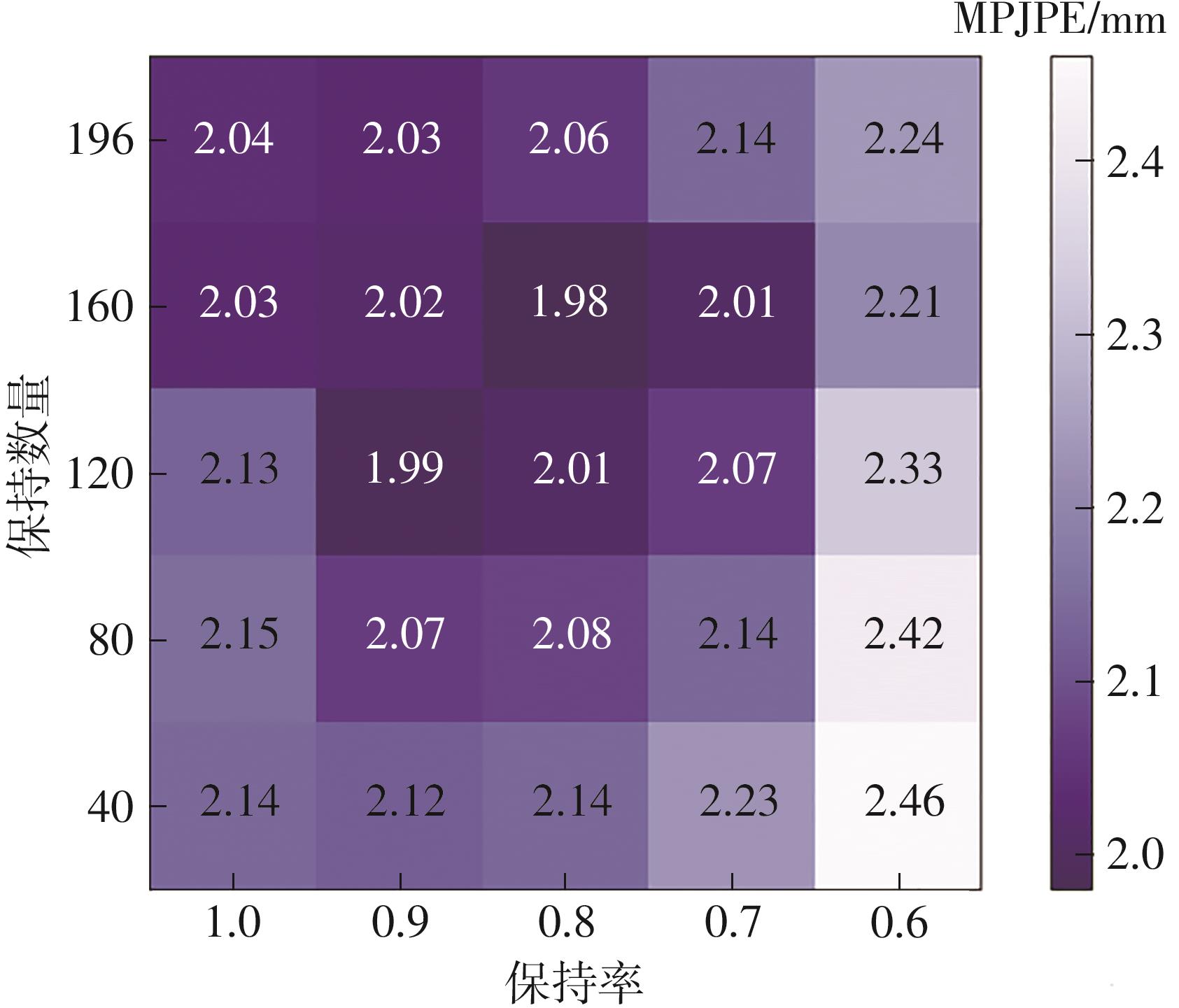

Fig.8
RGB feature enhancement of keypoints"
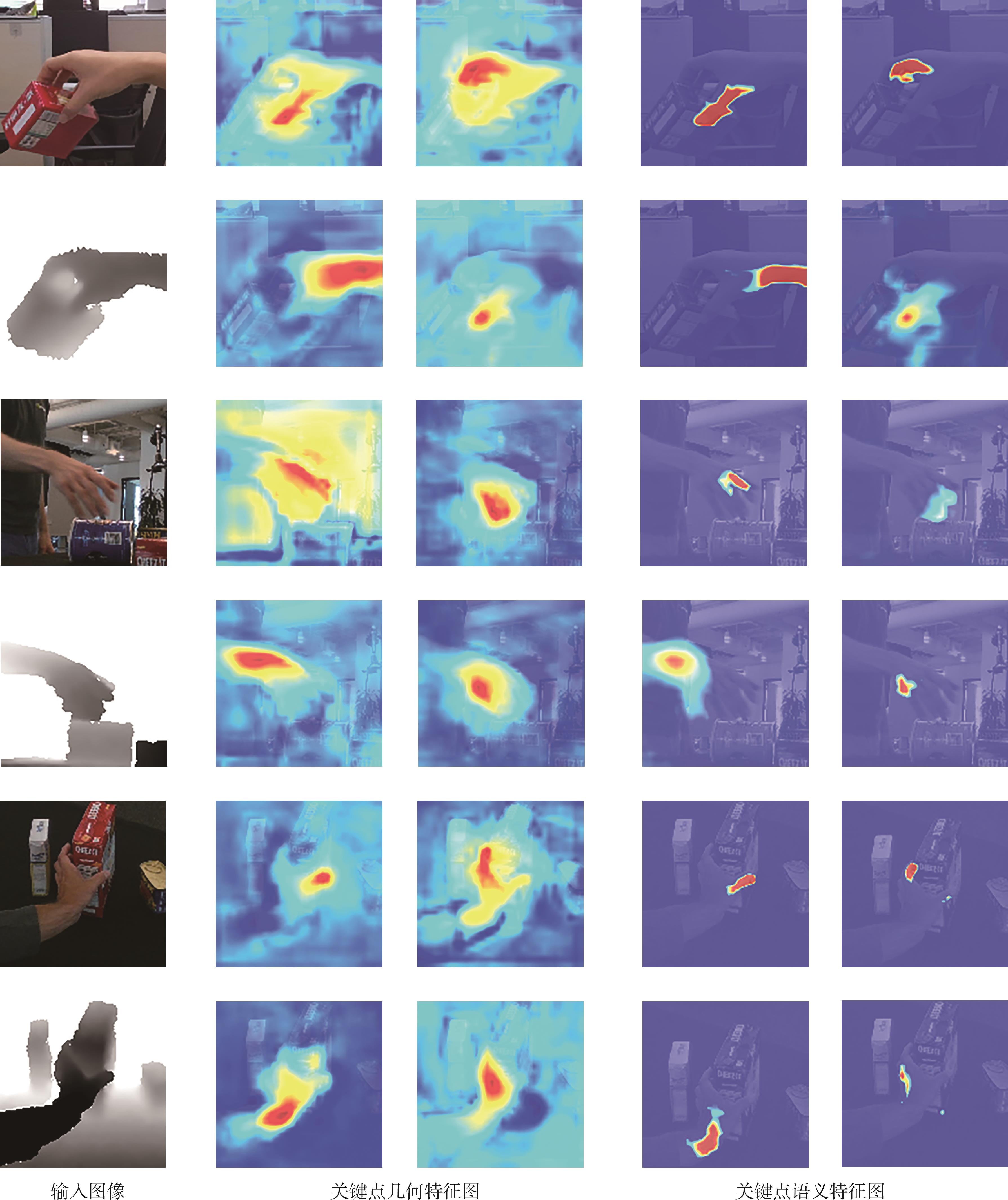

Fig.9
Visualization results of keypoints on DexYCB dataset"
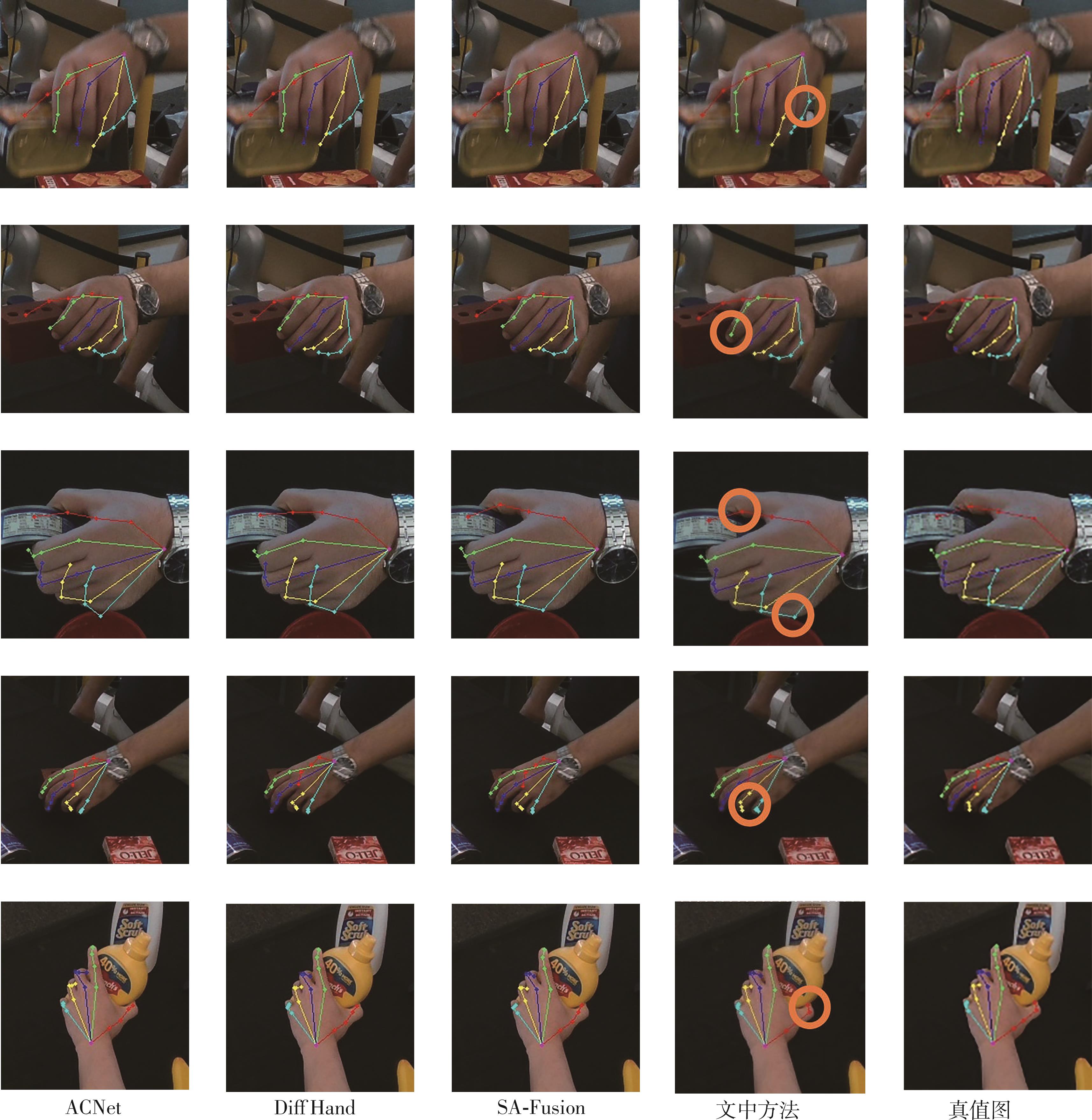

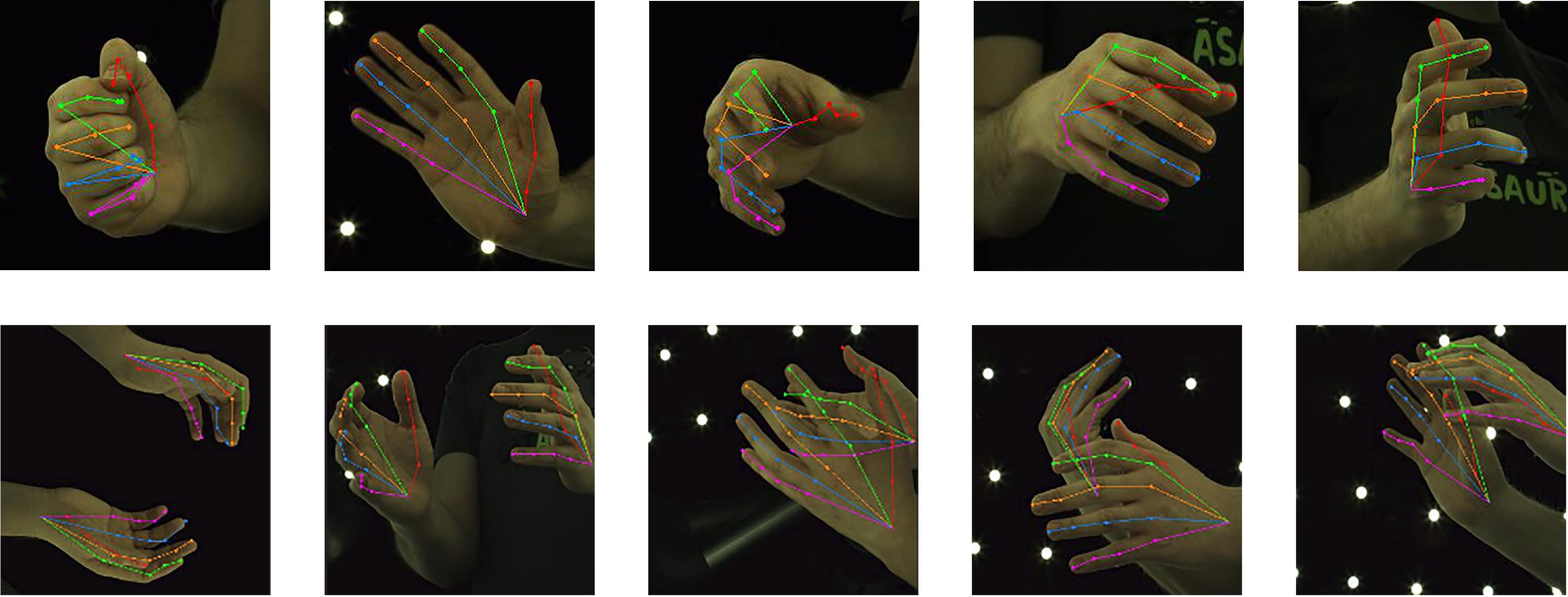
Fig.10
Visualization results of keypoints obtained by the proposed method on HO-3D dataset"
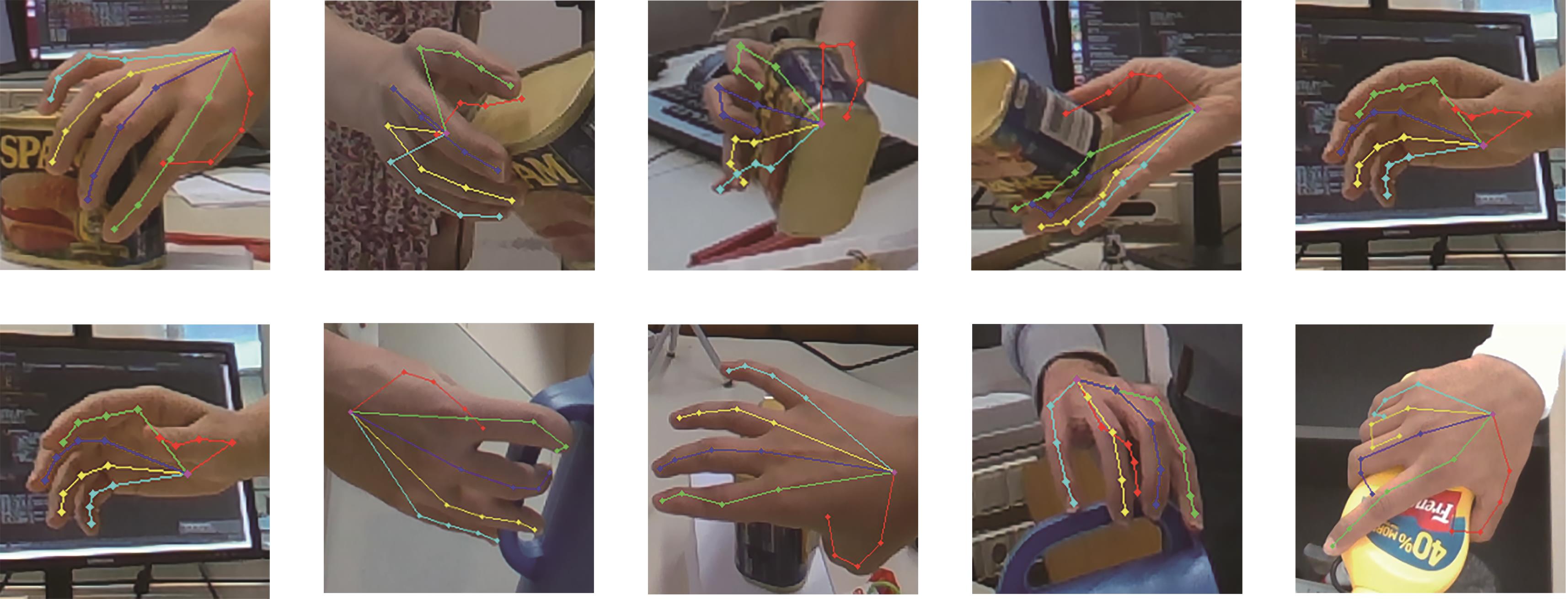

Fig.11
Visualization results of keypoints obtained by the proposed method on InterHand2.6M dataset"
| [1] | ROUMAISSA B, MOHAMED C B .Deep learning based on hand pose estimation methods:a systematic literature review[J].Multimedia Tools and Applications,2025,84(3):1-38. |
| [2] | BEHÚN K, PAVELKOVÁ A, HEROUT A .Implicit hand gestures in aeronautics cockpit as a cue for crew state and workload inference[C]∥Proceedings of 2015 IEEE 18th International Conference on Intelligent Transportation Systems.Gran Canaria:IEEE,2015:632-637. |
| [3] | LIU X, REN P, GAO Y,et al .Keypoint fusion for RGB-D based 3D hand pose estimation[C]∥Proceedings of the AAAI Conference on Artificial Intelligence.Vancouver:AAAI Press,2024:3756-3764. |
| [4] | REZAEI M, RASTGOO R, ATHITSOS V .TriHorn-net:a model for accurate depth-based 3D hand pose estimation[J].Expert Systems with Applications,2023,223(1):119922/1-9. |
| [5] | 孙迪钢,张平 .基于先验知识和网格监督的手部姿态估计[J].华南理工大学学报(自然科学版),2024,52(6):138-147. |
| SUN Digang, ZHANG Ping .Hand pose estimation based on prior knowledge and mesh supervision[J].Journal of South China University of Technology (Natural Science Edition),2024,52(6):138-147. | |
| [6] | KAZAKOS E, NIKOU C, KAKADIARIS I A .On the fusion of RGB and depth information for hand pose estimation[C]∥Proceedings of 2018 25th IEEE International Conference on Image Processing.Athens:IEEE,2018:868-872. |
| [7] | XU P, ZHU X, CLIFTON D A .Multimodal learning with transformers:a survey[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2023,45(10):12113-12132. |
| [8] | HU X, YANG K, FEI L,et al .ACNet:attention based network to exploit complementary features for rgbd semantic segmentation[C]∥Proceedings of 2019 IEEE International Conference on Image Processing.Taipei:IEEE,2019:1440-1444. |
| [9] | HU J, SHEN L, SUN G .Squeeze-and-excitation networks[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Salt Lake City:IEEE Computer Society,2018:7132-7141. |
| [10] | LIU X, REN P, CHEN Y,et al .SA-Fusion:multimodal fusion approach for web-based human-computer interaction in the wild[C]∥Proceedings of the ACM Web Conference 2023.Austin:ACM Press,2023:3883-3891. |
| [11] | GUAN X, SHEN H, NYATEGA C O,et al .Repeated cross-scale structure-induced feature fusion network for 2D hand pose estimation[J].Entropy,2023,25(5):724/1-16. |
| [12] | 冼进,徐小茹,冼允廷,等 .基于混合编码和掩膜空间调制的图像补全算法[J].华南理工大学学报(自然科学版),2025,53(3):31-39. |
| XIAN Jin, XU Xiaoru, XIAN Yunting,et al .Image inpainting network based on hybrid encoding and mask space modulation[J].Journal of South China University of Technology (Natural Science Edition),2025,53(3):31-39. | |
| [13] | REN P, CHEN Y, HAO J,et al .Two heads are better than one: Image-point cloud network for depth-based 3D hand pose estimation[C]∥Proceedings of the AAAI Conference on Artificial Intelligence.Wa-shington D C:AAAI Press,2023:2163-2171. |
| [14] | OHKAWA T, HE K, SENER F,et al .Assemblyhands:towards egocentric activity understanding via 3d hand pose estimation[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Vancouver:IEEE,2023:12999-13008. |
| [15] | CHAO Y, YANG W, XIANG Y,et al .DexYCB:a benchmark for capturing hand grasping of objects[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Virtual Conference:IEEE,2021:9044-9053. |
| [16] | MOON G, YU S I, WEN H,et al .InterHand2.6M:a dataset and baseline for 3D interacting hand pose estimation from a single RGB image[C]∥Proceedings of 16th European Conference on Computer Vision-ECCV 2020:Glasgow:Springer International Publishing,2020:548-564. |
| [17] | PASZKE A, GROSS S, MASSA F,et al .PyTorch: an imperative style,high-performance deep learning library[J].Advances in Neural Information Processing Systems,2019,32(1):8026–8037 |
| [18] | KULON D, WANG H, GÜLER R A,et al .Single image 3D hand reconstruction with mesh convolutions[EB/OL].(2019-08-15)[2024-12-30].. |
| [19] | HUANG W, REN P, WANG J,et al .AWR:adaptive weighting regression for 3d hand pose estimation[C]∥Proceedings of the AAAI Conference on Artificial Intelligence.New York:AAAI Press,2020:11061-11068. |
| [20] | XIONG F, ZHANG B, XIAO Y,et al .A2J: anchor-to-joint regression network for 3D articulated pose estimation from a single depth image[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision.Seoul:IEEE,2019:793-802. |
| [21] | JIANG C, XIAO Y, WU C,et al .A2J-transformer:anchor-to-joint transformer network for 3D interacting hand pose estimation from a single RGB image[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Vancouver:IEEE,2023:8846-8855. |
| [22] | FU Q, LIU X, XU R,et al .Deformer:dynamic fusion transformer for robust hand pose estimation[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision.Paris:IEEE,2023:23600-23611. |
| [23] | KUANG Z, DING C, YAO H .Learning context with priors for 3D interacting hand-object pose estimation[C]∥Proceedings of the 32nd ACM International Conference on Multimedia.Melbourne:Association for Computing Machinery,2024:768-777. |
| [24] | DURAN E, KOCABAS M, CHOUTAS V,et al .HMP: hand motion priors for pose and shape estimation from video[C]∥Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2024:6353-6363. |
| [25] | PARK J K,OH Y, MOON G,et al .HandOccNet: occlusion-robust 3D hand mesh estimation network[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:1496-1505. |
| [26] | HAMPALI S,RAD M, OBERWEGER M,et al .HOnnotate: a method for 3D annotation of hand and object poses[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Virtual Event:IEEE,2020:3196-3206. |
| [27] | OPHOFF T, VAN BEECK K, GOEDEMÉ T .Exploring RGB+ depth fusion for real-time object detection[J].Sensors,2019,19(4):866/1-16. |
| [28] | LI L, ZHUO L, ZHANG B,et al .DiffHand: end-to-end hand mesh reconstruction via diffusion models[EB/OL].(2023-05-23)[2024-12-30].. |
| [29] | GAO K, LIU X, REN P,et al .Progressively global-local fusion with explicit guidance for accurate and robust 3D hand pose reconstruction[J].Knowledge-Based Systems,2024,304:112532/ 1-22. |
| [30] | LIN X, ZHOU Y, DU K,et al .Multi-level fusion net for hand pose estimation in hand-object interaction[J].Signal Processing:Image Communication,2021,94(1):116196/1-14. |
| [31] | HASSON Y, TEKIN B, BOGO F,et al .Leveraging photometric consistency over time for supervised hand-object reconstruction[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.Virtual Event:IEEE,2020:571-580. |
| [32] | FAN Z, SPURR A, KOCABAS M,et al .Learning to disambiguate strongly interacting hands via probabilistic per-pixel part segmentation[C]∥Proceedings of 2021 International Conference on 3D Vision.London:IEEE,2021:1-10. |
| [33] | HAMPALI S, SARKAR S D,RAD M,et al .Keypoint transformer:solving joint identification in challenging hands and object interactions for accurate 3d pose estimation[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:11090-11100. |
| [34] | SUN D, ZHANG P .Interacting two-hand instance segmentation and pose estimation based on attention-induced separation[J].doi:10.36227/techrxiv.171341028.82821498/v1 . |
| [35] | YAO H, DING C, XU X,et al .Decoupling heterogeneous features for robust interacting hand poses estimation[C]∥Proceedings of the 32nd ACM International Conference on Multimedia.Melbourne:Association for Computing Machinery,2024:5338-5346. |
| [1] | SUN Digang, ZHANG Ping. Hand Pose Estimation Based on Prior Knowledge and Mesh Supervision [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(6): 138-147. |
| [2] | Zhang Ling Tai Guo-qin Liu Ran Xie Hui Xu Xiao-yan. Correction Algorithm of Matching Error for DIBR [J]. Journal of South China University of Technology(Natural Science Edition), 2011, 39(12): 51-55. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||