Journal of South China University of Technology(Natural Science Edition) ›› 2025, Vol. 53 ›› Issue (5): 11-19.doi: 10.12141/j.issn.1000-565X.240408
• Mechanical Engineering • Previous Articles Next Articles
A Quick Coupling Device with Free Posture Adjustment Used for Emergency Rescue Robot Attachments
LI Wei1, LIU Jiachen1, ZHANG Weiyuan1, HUANG Rihong2, BAI Jing3, JIANG Chao1
- 1.College of Mechanical and Vehicle Engineering,Hunan University,Changsha 410082,Hunan,China
2.Teaching and Research Office,A Certain Unit of the PLA,Guangzhou 510000,Guangdong,China
3.Zoomlion Heavy Industry Science and Technology Co. ,Ltd. ,Changsha 410013,Hunan,China
-
Received:2024-08-19Online:2025-05-25Published:2024-11-01 -
About author:李伟(1983—),男,博士,教授,主要从事复杂装备智能化集成设计、智能加工制造研究。E-mail: liwei@hnu.edu.cn -
Supported by:the National Key Research and Development Program of China(2020YFC1512103)
CLC Number:
Cite this article
LI Wei, LIU Jiachen, ZHANG Weiyuan, HUANG Rihong, BAI Jing, JIANG Chao. A Quick Coupling Device with Free Posture Adjustment Used for Emergency Rescue Robot Attachments[J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(5): 11-19.
share this article
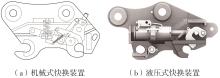
Fig.1
Ordinary types of quick coupling device"
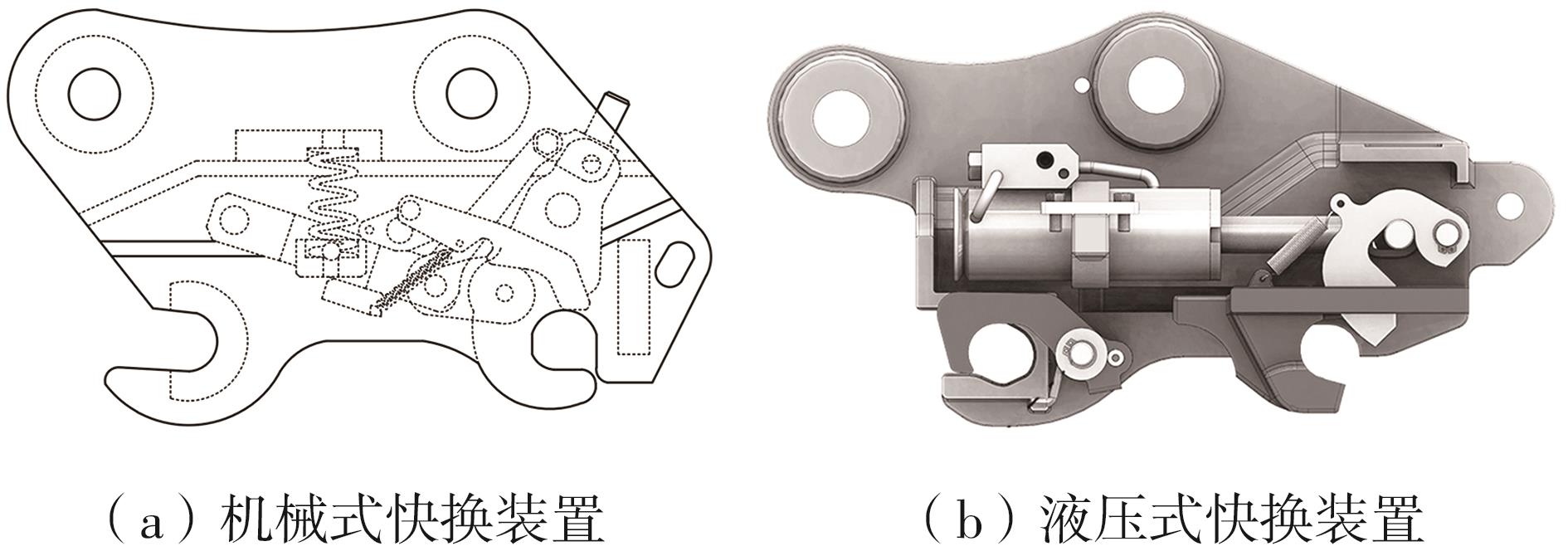
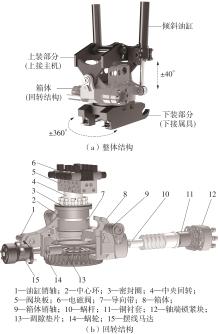
Fig.2
Structure of the electromechanical hydraulic quick coupling device"
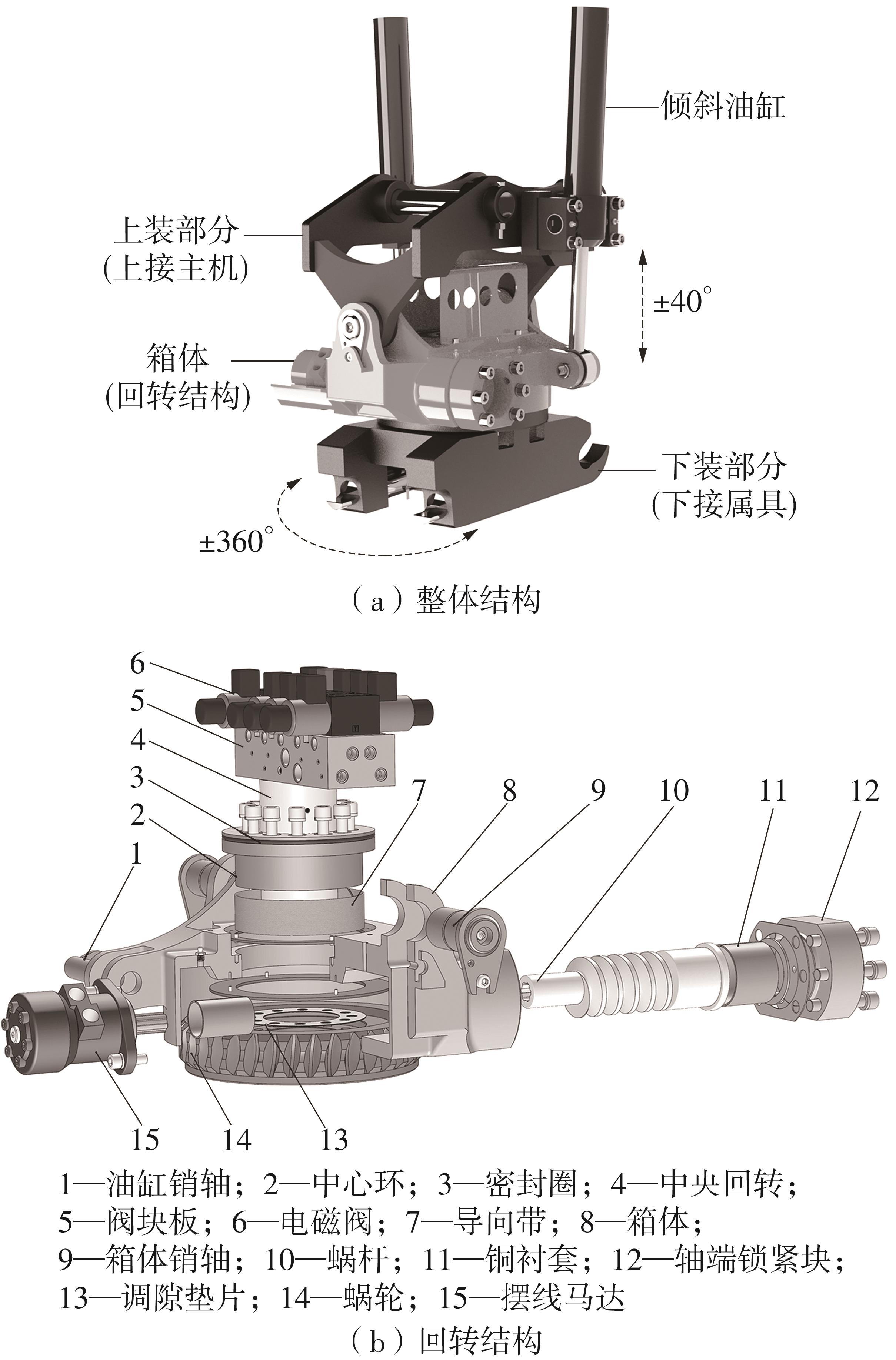
Table 1
Mechanical properties of relevant materials[13]"
| 钢材型号 | 弹性 模量/GPa | 泊松比 | 密度/ (g·cm-3) | 屈服 极限/MPa | 拉伸 极限/MPa |
|---|---|---|---|---|---|
| Q345B | 212 | 0.310 | 7.87 | 345 | 510 |
| ZCuSn10P1 | 853 | 0.320 | 8.41 | 122 | 276 |
| 40Cr | 211 | 0.277 | 7.87 | 805 | 940 |
| 42CrMo | 212 | 0.280 | 7.85 | 1 047 | 1 134 |
| 45# | 209 | 0.269 | 7.85 | 377 | 624 |
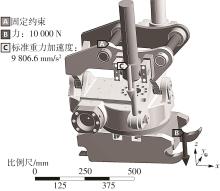
Fig.3
Boundary and load condition setting"
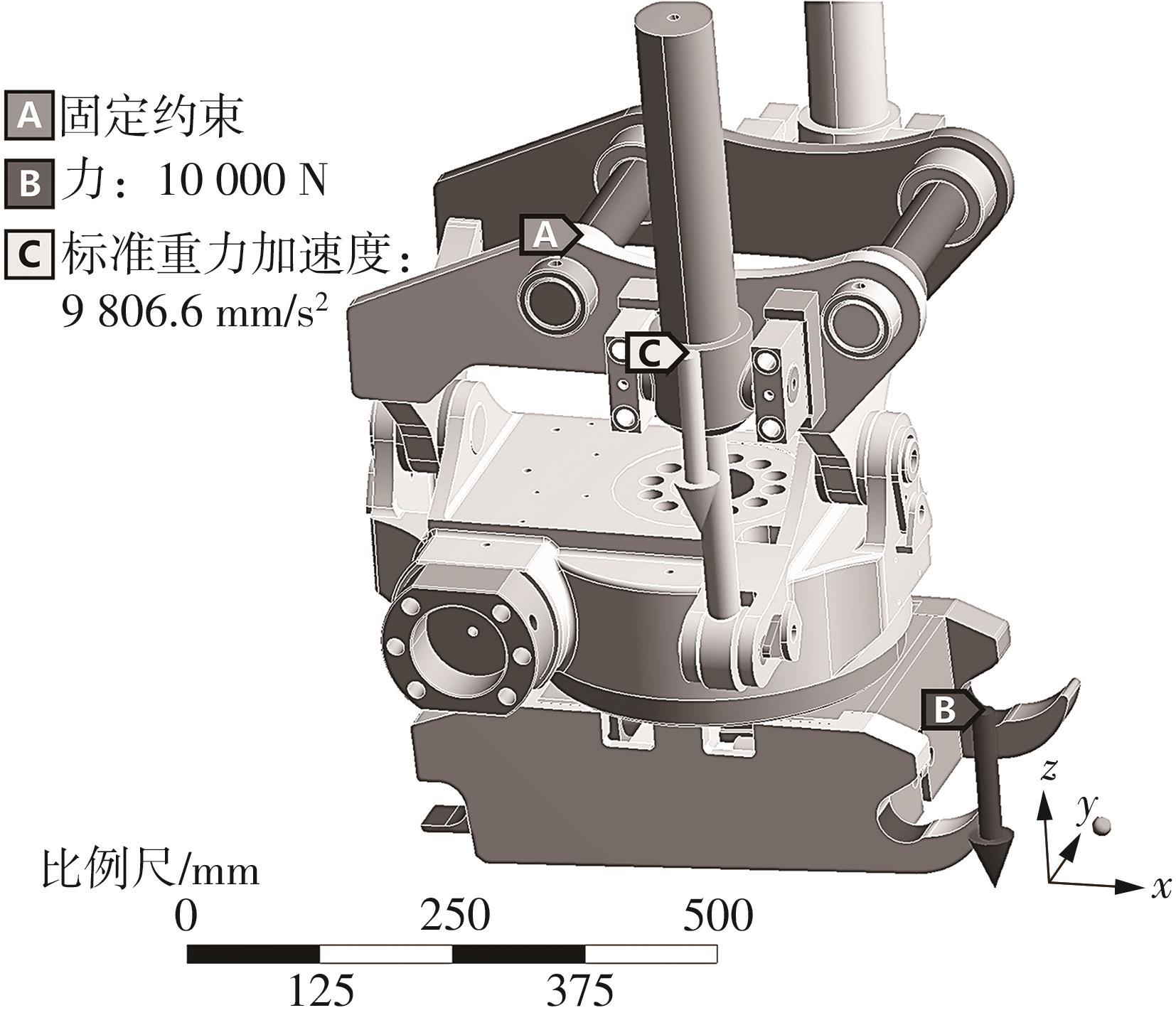
Fig.4
Static analysis results of quick coupling device"
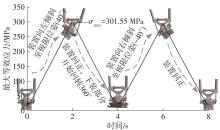
Fig.5
Motion process and its load spectrum of quick coupling device"
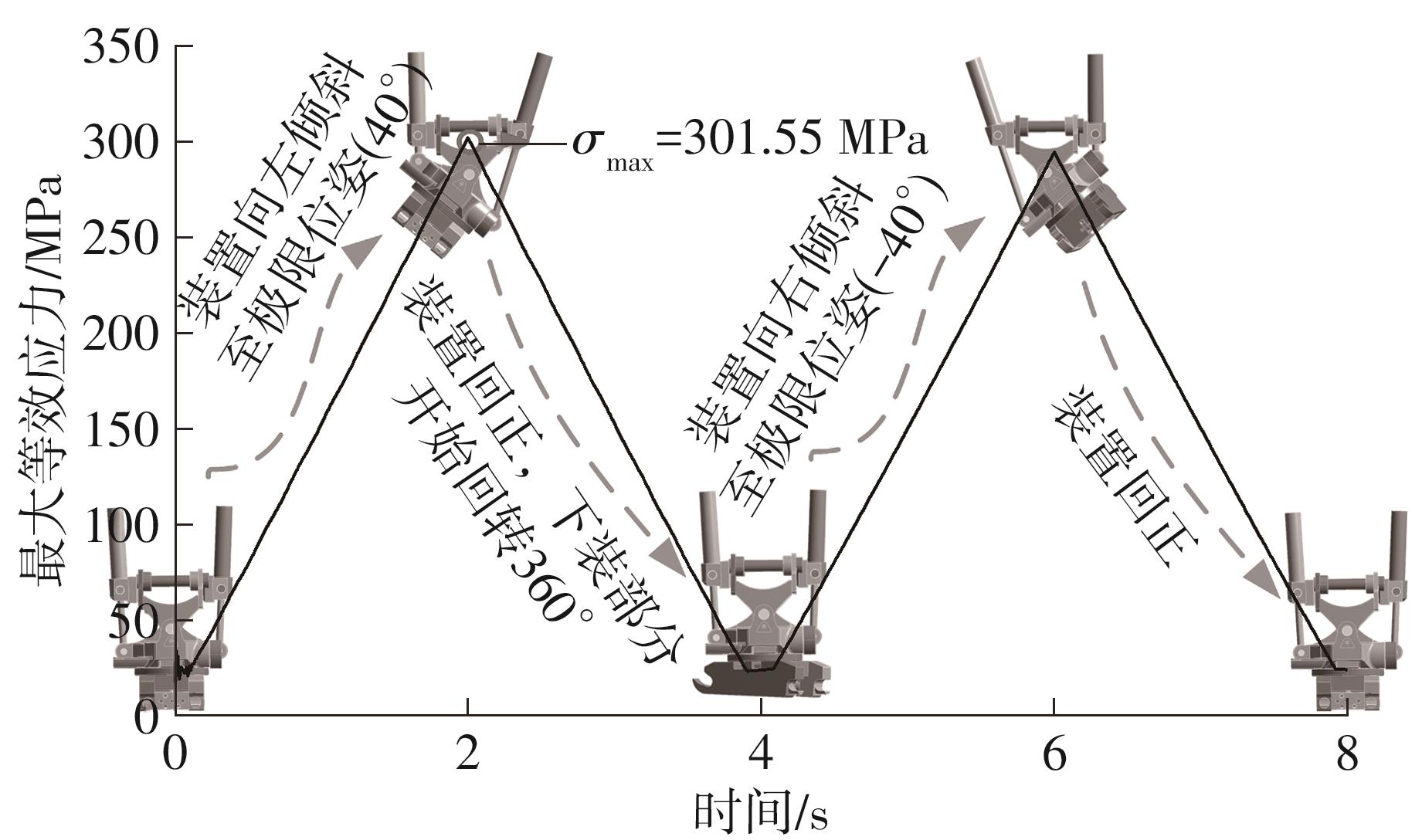
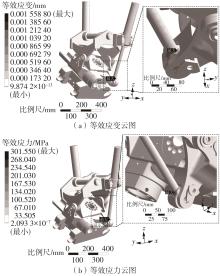
Fig.6
Maximum load of quick coupling device (t=2 s)"
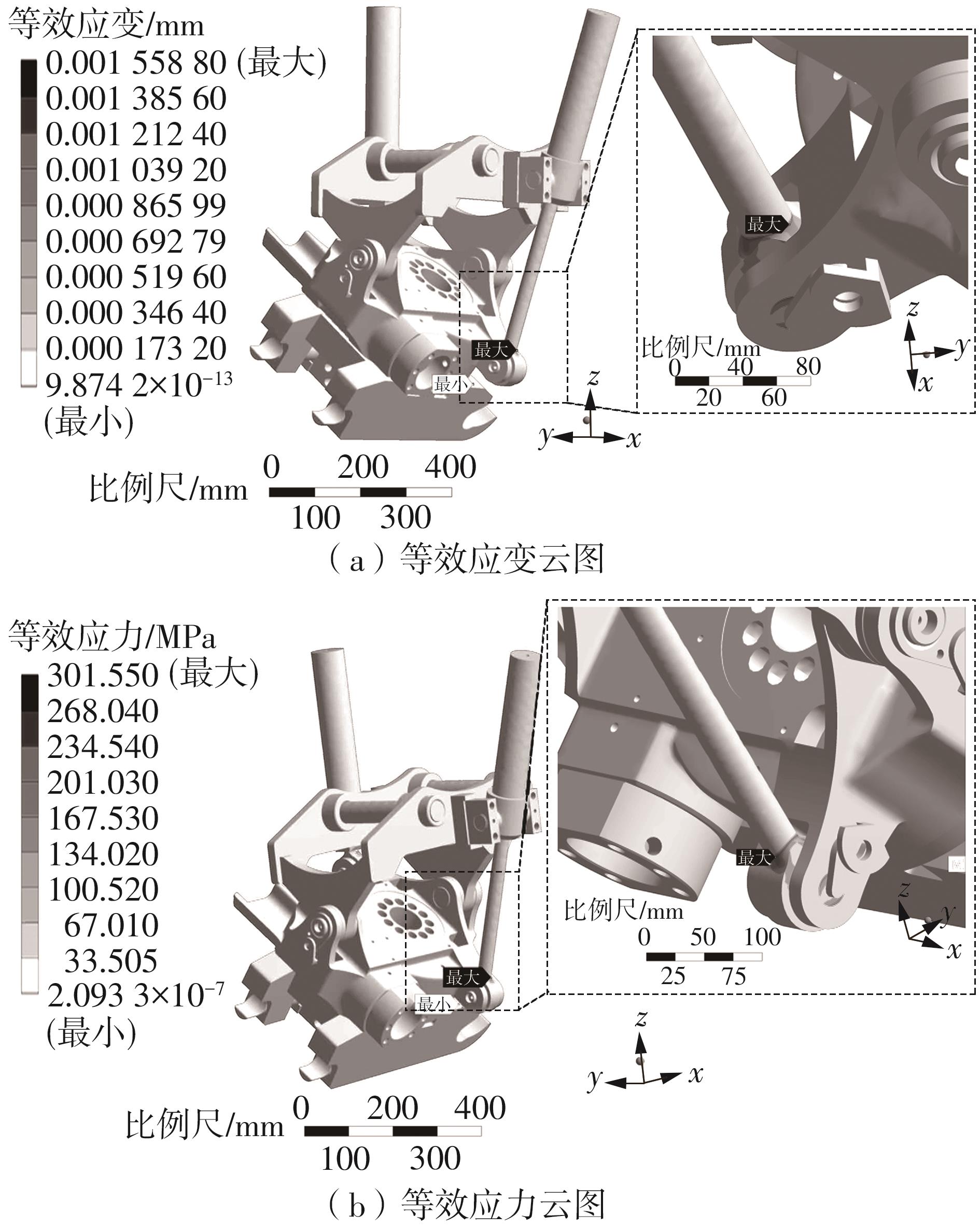
Table 2
Reliability analysis parameters of rotating mechanism"
| 变量名称 | 符号 | 均值 | 标准差 | 单位 | 分布规律 |
|---|---|---|---|---|---|
| 修正系数 | W | 0.90 | 0.15 | 正态分布 | |
| 蜗轮转矩 | T | 2 387.3 | 238.7 | N·m | |
| 蜗杆分度圆直径 | d1 | 63 | 0.10 | mm | |
| 蜗轮分度圆直径 | d2 | 304 | 0.17 | mm |
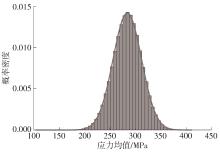
Fig.7
Probability distribution of contact stress"
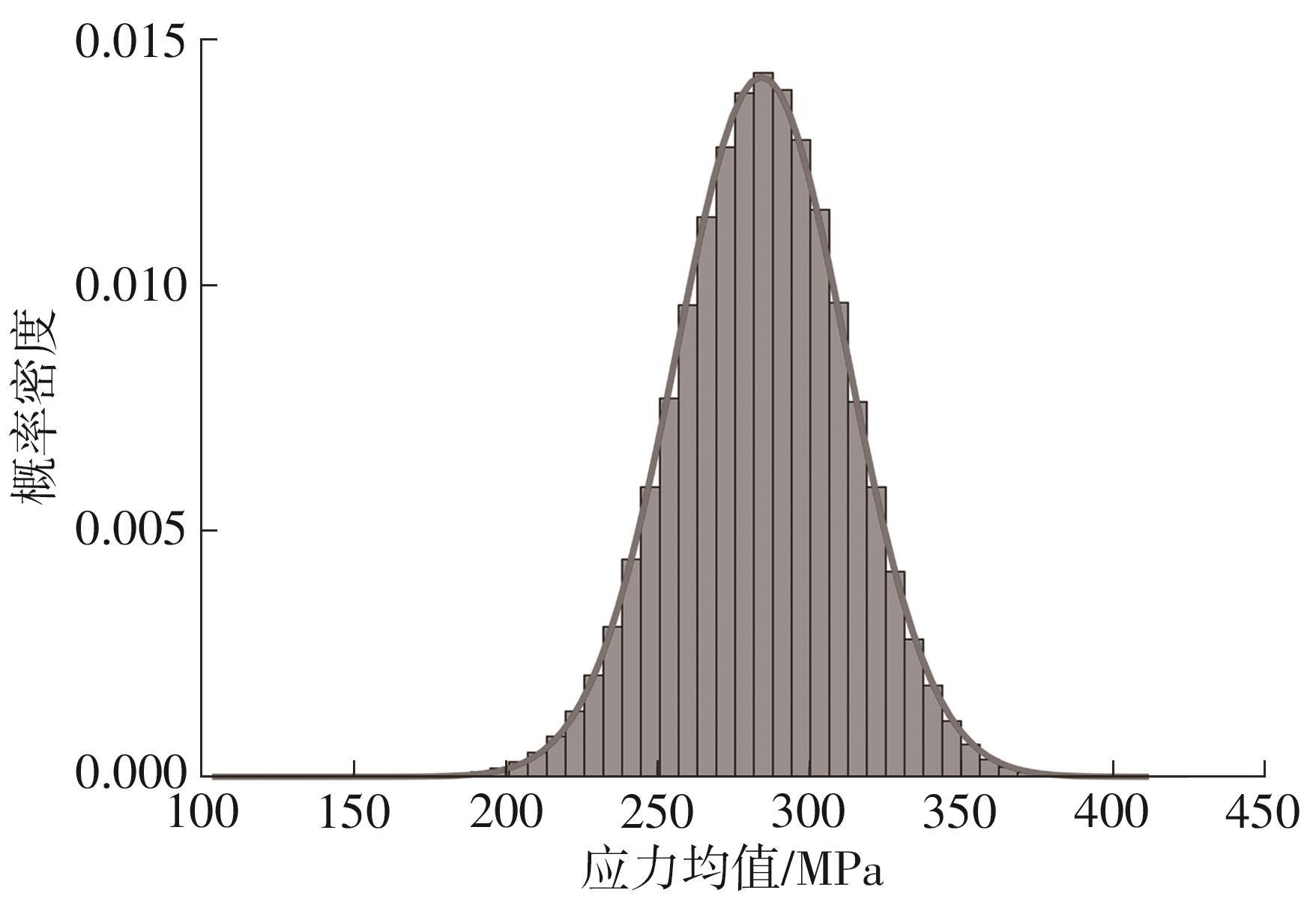
Fig.8
Effect of load cycles on reliability"
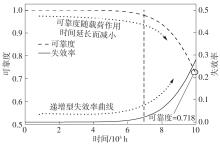
Fig.9
Mapping relationship between reliability and failure rate of rotating mechanism"
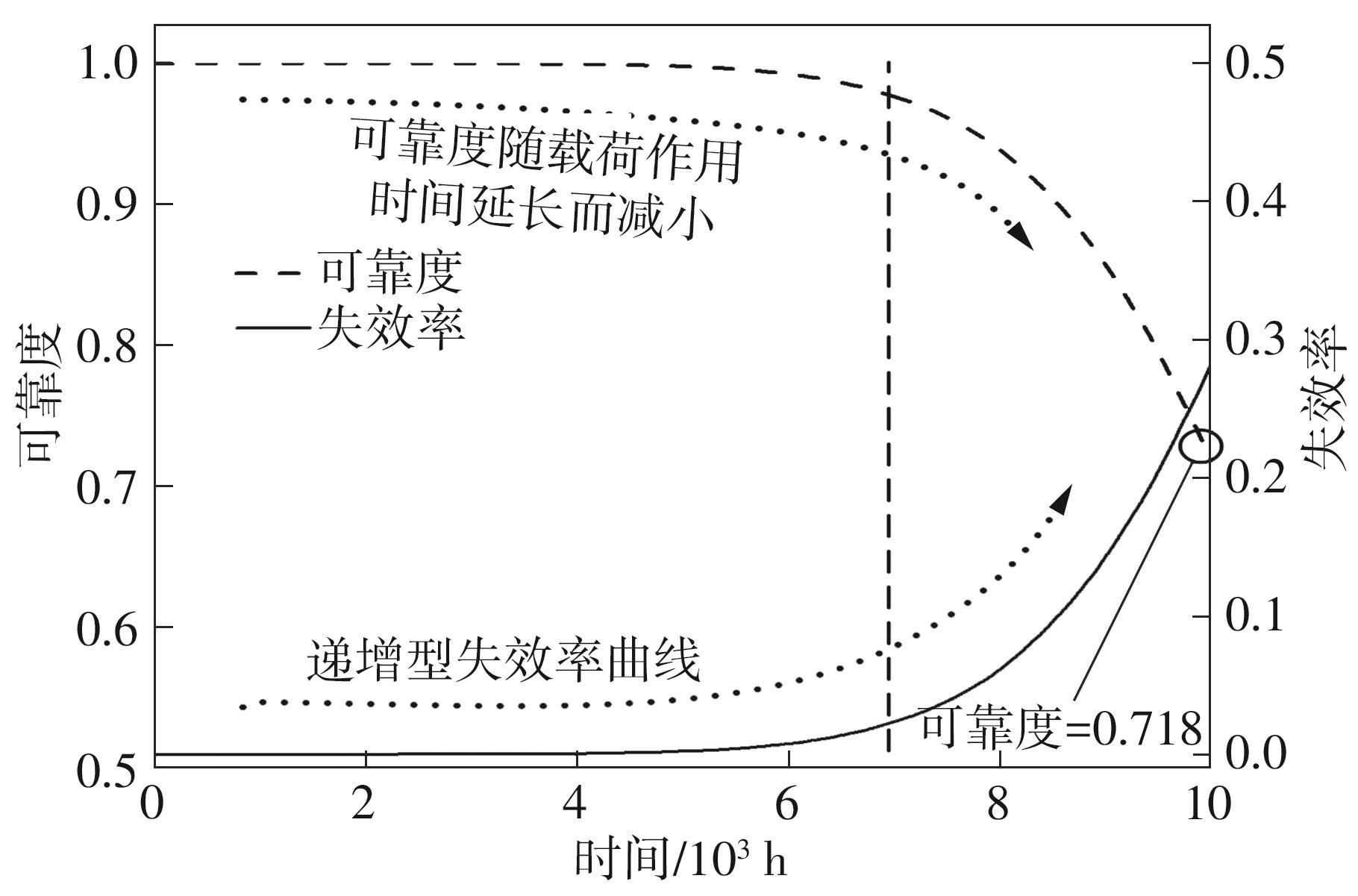
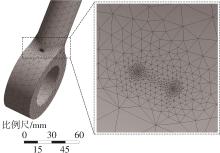
Fig.10
Meshing of piston rod"
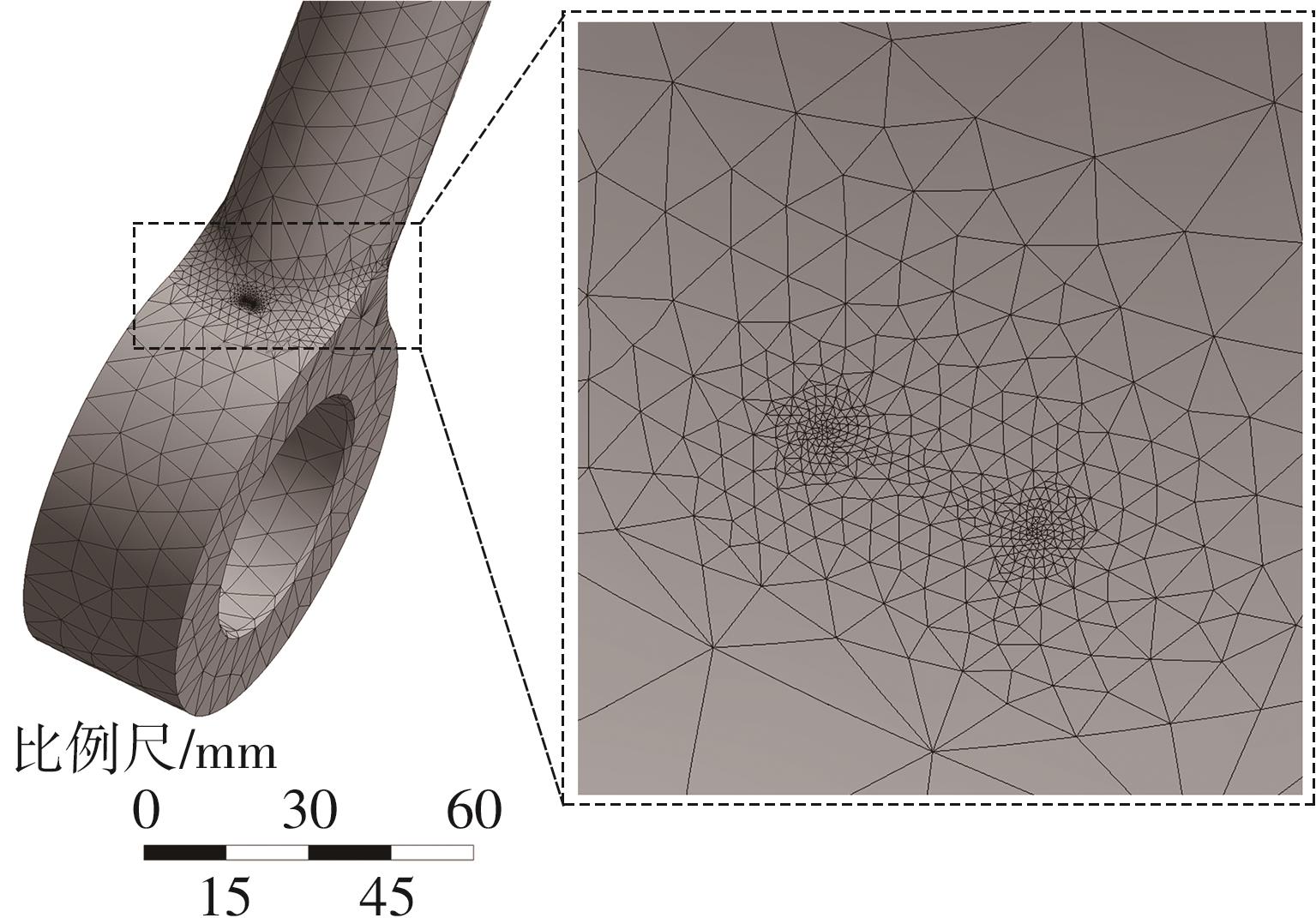

Fig.11
Crack stress intensity factor and piston rod life"
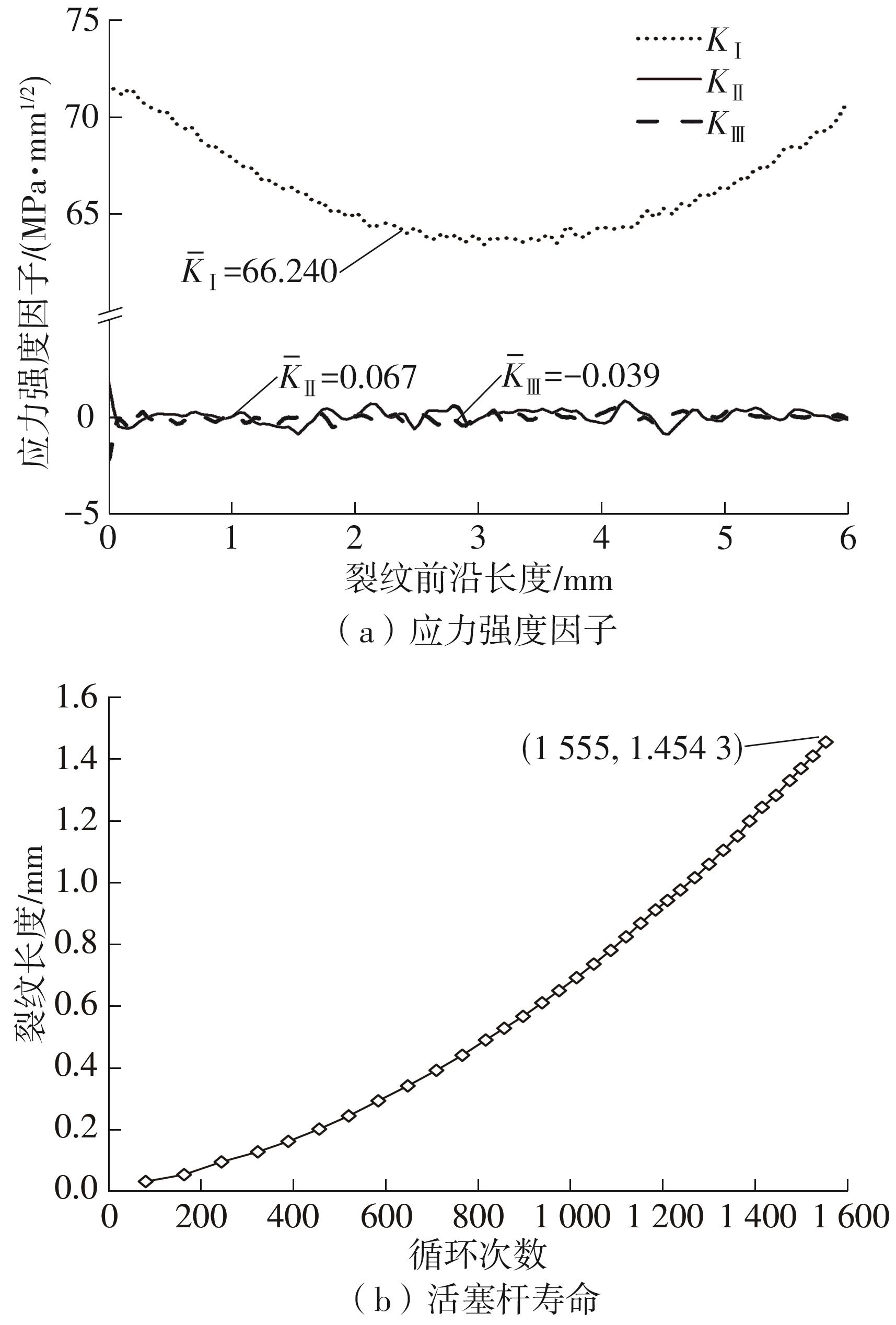
Fig.12
Material stress life of quick coupling device[13]"
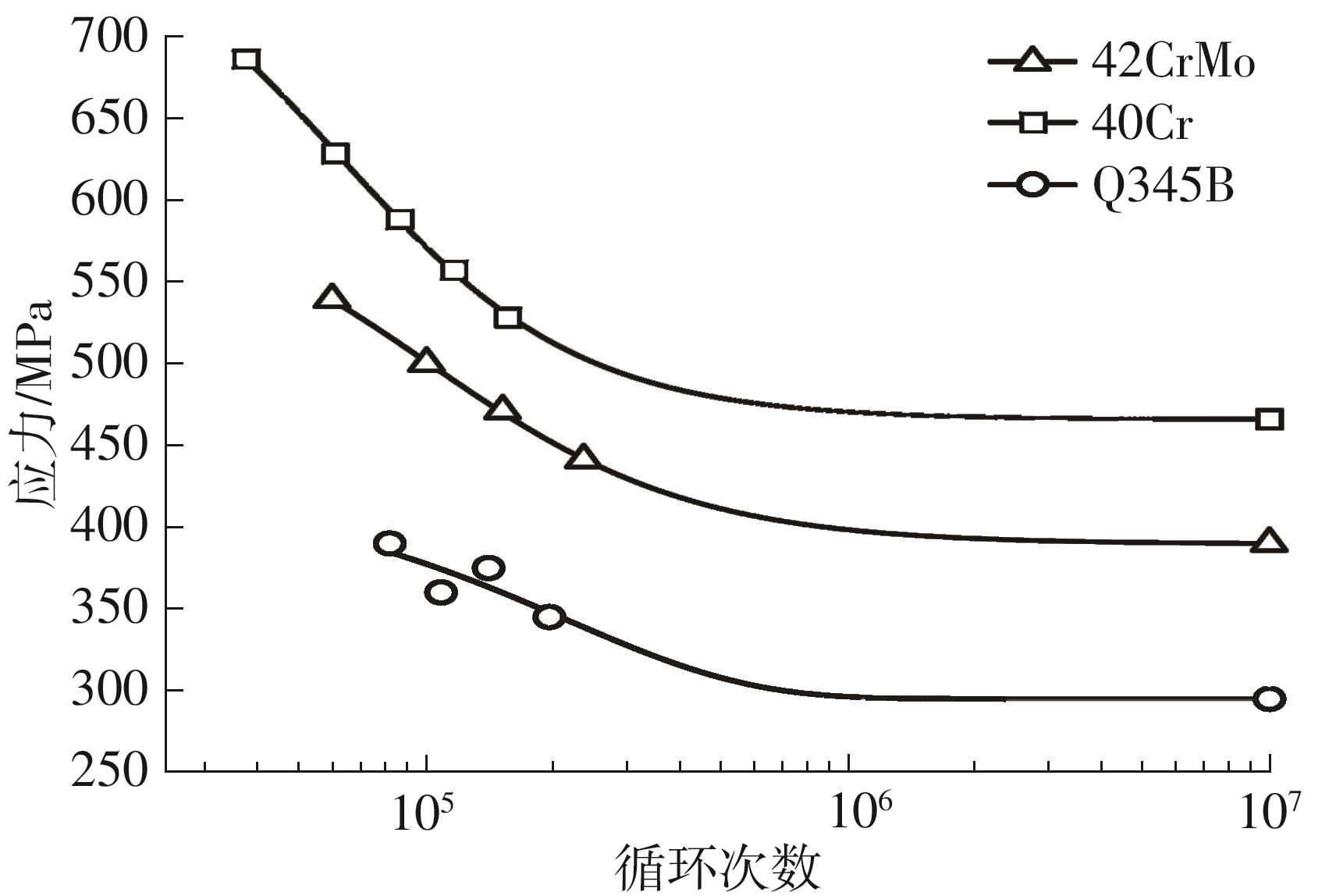
Table 3
Material strain life of quick coupling device[14-15]"
| 材料 | 疲劳强度系数 | 疲劳强度指数 | 疲劳延性系数 | 疲劳延性指数 | 循环强度系数/MPa | 循环应变指数 |
|---|---|---|---|---|---|---|
| 42CrMo | 1 177.0 | -0.064 0 | 1.302 0 | -0.727 0 | 1 110.0 | 0.083 0 |
| 40Cr | 1 385.1 | -0.078 9 | 0.380 9 | -0.576 5 | 1 228.9 | 0.090 3 |
| Q345B | 947.1 | -0.094 3 | 0.464 4 | -0.539 5 | 1 164.8 | 0.187 1 |

Fig.13
Fatigue life analysis results of quick coupling device"
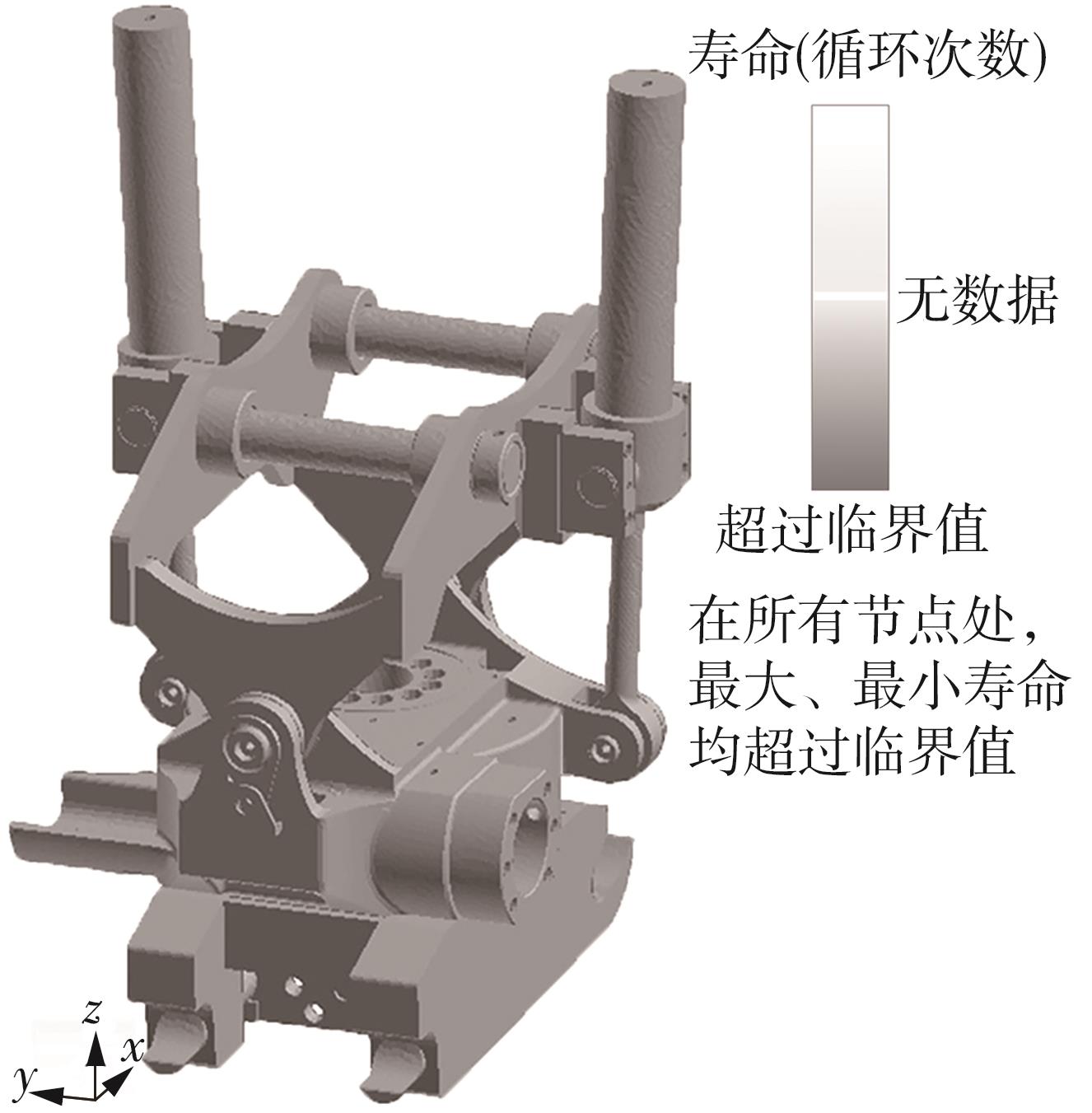

Fig.14
Integration of quick coupling device with rescue robot"


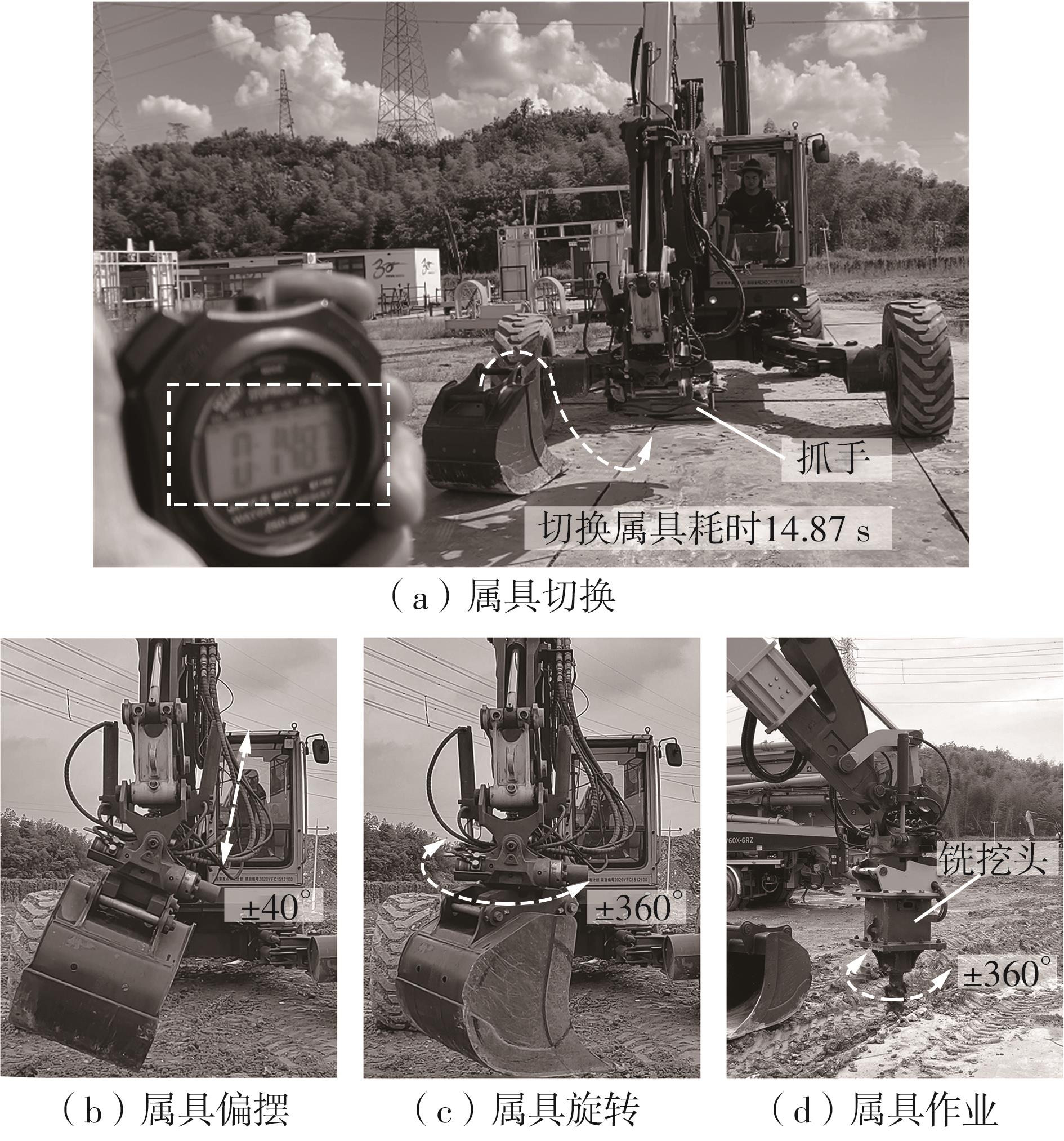
Fig.15
Functional test of quick coupling device"
| 1 | 董炳艳,赵自强,徐兰军,等 .智能应急救援装备研究现状与发展趋势[J].机械工程学报,2020,56(11):1-25. |
| DONG Bingyan, ZHAO Ziqiang, XU Lanjun,et al .Research status and development trend of intelligent emergency rescue equipment[J].Journal of Mechanical Engineering,2020,56(11):1-25. | |
| 2 | 汤志东,贠超 .全自动快换装置快速接头技术综述[J].浙江大学学报(工学版),2017,51(3):461-470. |
| TANG Zhidong, YUN Chao .Quick action coupling technology in full-automatic quick coupling device: a review[J].Journal of Zhejiang University (Engineering Science),2017,51(3):461-470. | |
| 3 | 汤志东,贠超 .全自动快换装置精准对接技术[J].北京航空航天大学学报,2017,43(9):1859-1872. |
| TANG Zhidong, YUN Chao .Precise docking technology in full-automatic quick hitch coupling device[J].Journal of Beijing University Aeronautics and Astronautics,2017,43(9):1859-1872. | |
| 4 | MARCEL W, MARKUS L, HEIKO K .Device for conducting hydraulic fluid:US 17/289342[P].2021-09-08. |
| 5 | JONSSON A .Control systems for an excavator and methods for controlling an excavator with a movable excavator thumb and an auxiliary tool hold by an tiltrotator:US 16/606566[P].2021-04-01. |
| 6 | 杨淞麟,刘满禄,张俊俊,等 .核应急机器人末端工具快换装置的设计及分析[J].机械设计,2021,38(7):56-62. |
| YANG Song-lin, LIU Man-lu, ZHANG Jun-jun,et al .Design and analysis of the end-effector’s quick-change device for nuclear emergency-response robots[J].Journal of Machine Design,2021,38(7):56-62. | |
| 7 | 尚海兴 .全自动液压手腕设计研究[D].马鞍山:安徽工业大学,2021. |
| 8 | 李亮 .破拆机器人快捷液压手腕设计与仿真研究[D].马鞍山:安徽工业大学,2017. |
| 9 | WANG P, XIANG Q, KRÓLCZYK G,et al .Dynamic modeling of a hydraulic excavator stick by introducing multi-case synthesized load spectrum for bench fatigue test[J].Machines,2022,10(9):741/1-15. |
| 10 | CAO L, CAO L, GUO L,et al .Reliability estimation for drive axle of wheel loader under extreme small sample[J].Advances in Mechanical Engineering,2019,11(3):1-12. |
| 11 | 曹蕾蕾,郭城臣,王严,等 .基于实测数据的挖掘机工作装置疲劳寿命评估[J].华南理工大学学报(自然科学版),2021,49(8):122-128,139. |
| CAO Leilei, GUO Chengchen, WANG Yan,et al .Fatigue analysis of hydraulic excavator working device based on experiment data[J].Journal of South China University of Technology (Natural Science Edition),2021,49(8):122-128,139. | |
| 12 | 曹蕾蕾,王留涛,王严,等 .基于等效结构应力法的挖掘机工作装置疲劳寿命评估[J].华南理工大学学报(自然科学版),2022,50(8):62-70. |
| CAO Leilei, WANG Liutao, WANG Yan,et al .Fatigue life evaluation of excavator working device based on equivalent structural stress method[J].Journal of South China University of Technology (Natural Science Edition),2022,50(8):62-70. | |
| 13 | 《机械工程材料性能数据手册》编委会 .机械工程材料性能数据手册[M].北京:机械工业出版社,1995. |
| 14 | 赵少汴 .抗疲劳设计[M].北京:机械工业出版社,1994. |
| 15 | 闻邦椿 .机械设计手册:第6卷[M].6版.北京:机械工业出版社,2020. |
| [1] | WANG Xiaoming, LI Pengfei, WU Runhan, YANG Wenjie LI Chenxi. Study on Maintenance Strategy of Existing Concrete Bridge Considering Reinforcement Time Interval [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(6): 34-43. |
| [2] | CHENG Jin, SUN Kedi, YUAN Yi. Deflection Reliability Assessment Method of Long-Span Suspension Bridge Based on Random Field [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(4): 13-21. |
| [3] | ZHANG Chi, GUO Tingyu, HU Ruilai, GAO Yanyang, ZHOU Yuming. Research on Average Longitudinal Slope Length of Expressway Based on Braking Behavior [J]. Journal of South China University of Technology(Natural Science Edition), 2025, 53(2): 12-26. |
| [4] | SHANGGUAN Wenbin, YUE Lian, LÜ Hui, et al. Fatigue Test and Calculation Methods for Battery Package Based on Load Spectrum [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(3): 50-56. |
| [5] | LI Min, YAO Qishui. Calculation of Fatigue Life of Rubber Vibration Isolators Under Random Vibration Loads [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(12): 14-21. |
| [6] | HE Jiapeng, ZHANG Jinyu, CHEN Zhangxing, et al.. Mechanical Properties Degradation Under Fatigue Loading in Pultruded Unidirectional Glass Fiber Reinforced Polymer Composites [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(1): 62-71. |
| [7] | DENG Manyu, YUAN Xingfei, DONG Yongcan. Study on Area-Loss Limit of Cable-Strut Structures Considering Different Failure Modes [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(1): 52-61. |
| [8] | ZHAO Xiaomei, ZHU Xiangyuan, WANG Qin, et al. Operational Reliability Optimization Strategies of Multi-type Bus Lines [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(8): 32-39. |
| [9] | CAO Leilei, WANG Liutao, WANG Yan, et al. Fatigue Life Evaluation of Excavator Working Device Based on Equivalent Structural Stress Method [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(8): 62-70. |
| [10] | WANG Jinxiao, LI Sida, CHENG Bin, et al. Experimental Study on Fatigue Behavior of Adhesive & Bolted Hybrid FRP Joints [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(11): 95-106. |
| [11] | CAO Leilei, GUO Chengchen, WANG Yan, et al. Fatigue Analysis of Hydraulic Excavator Working Device Based on Experiment Data [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(8): 122-128,139. |
| [12] | JIANG Jihai DU Boran ZHANG Jian. Application and Technology Prospects of Hydrodynamic-Magnetic Compound Support for Axial Piston Pump [J]. Journal of South China University of Technology(Natural Science Edition), 2021, 49(2): 88-98,109. |
| [13] | WEN Huiying, LIN Yifeng, WU Haoshu, et al. Extended Co-evolutionary Algorithm for Path Planning Based on the Urban Traffic Environment Evolution [J]. Journal of South China University of Technology (Natural Science Edition), 2021, 49(10): 1-10. |
| [14] | WAN Yipin SONG Xuding YUAN Zhengwen. Fatigue Test and Fatigue Reliability Evaluation of Loader Working Device [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(8): 108-114. |
| [15] | LIU Xiaoling, WANG Bing, HUANG Qiao, et al. Condition Assessment Model for Cable-Stayed Bridges Based on Evidence Reasoning Framework [J]. Journal of South China University of Technology (Natural Science Edition), 2020, 48(6): 69-76. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||