Journal of South China University of Technology(Natural Science Edition) ›› 2023, Vol. 51 ›› Issue (6): 52-61.doi: 10.12141/j.issn.1000-565X.220535
Special Issue: 2023年交通运输工程
• Traffic & Transportation Engineering • Previous Articles Next Articles
Active Disturbance Rejection Control of Active Stabilizer System Based on Particle Swarm Optimization
ZHAO Qiang1 LIU Chuanwei1 ZHANG Na2 ZHU Baoquan1 XIE Chunli1
- 1.College of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin 150040,Heilongjiang,China
2.School of Electrical and Control Engineering,Heilongjiang University of Science and Technology,Harbin 150022,Heilongjiang,China
-
Received:2022-08-19Online:2023-06-25Published:2022-12-06 -
Contact:刘传卫(1994-),男,硕士生,主要从事车辆动力学及控制研究。 E-mail:1436255322@qq.com -
About author:赵强(1971-),男,教授,博士生导师,主要从事车辆动力学及控制研究。E-mail:zhaoqiang@nefu.edu.cn -
Supported by:the Key Projects of National Key Research & Development Program of China(2017YFC0803901);the Heilongjiang Province Key Research & Development Project(JD22A014);the Natural Science Foundation of Heilongjiang Province(LH2021F002)
CLC Number:
Cite this article
ZHAO Qiang, LIU Chuanwei, ZHANG Na, et al. Active Disturbance Rejection Control of Active Stabilizer System Based on Particle Swarm Optimization[J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(6): 52-61.
share this article

Fig.1
14 Dynamics model of DOF vehicle"


Fig.2
Hydraulic motor type active stabilizer bar"


Fig.3
Valve controlled double vane hydraulic motor"

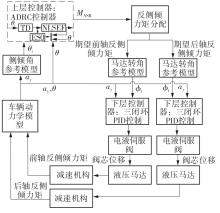
Fig.4
Control principle diagram of hydraulic motor active stabilizer bar system"
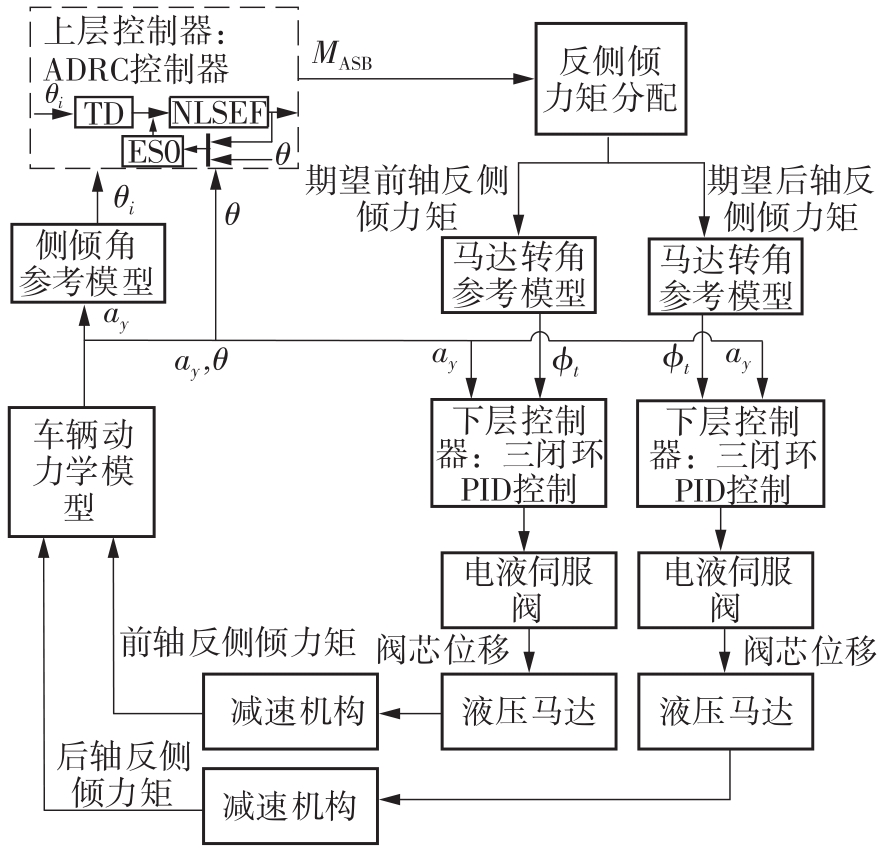

Fig.5
ADRC model"

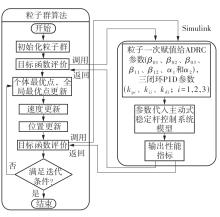
Fig.6
Flowchart of PSO optimizing ADRC"


Fig.7
Schematic diagram of torsional stiffness measurement"


Fig.8
Experimental measuring device"
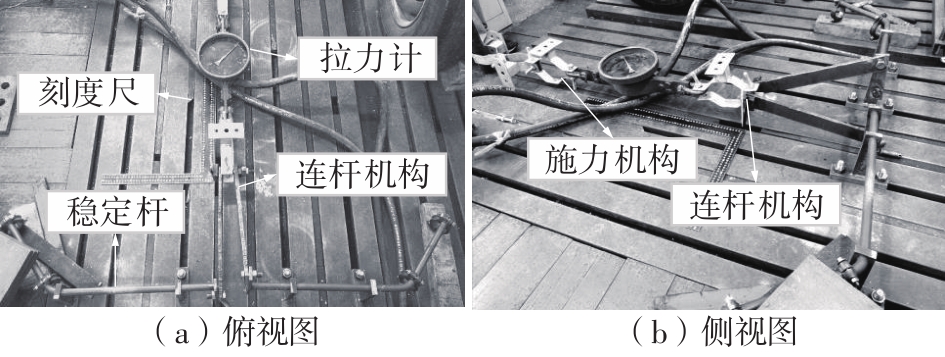
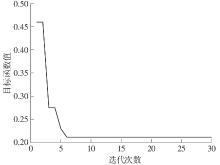
Fig.9
Optimization process of PSO-ADRC"


Fig.10
Curves of vehicle parameters under snake condition"


Fig.11
Curves of anti-roll moment under serpentine condition"
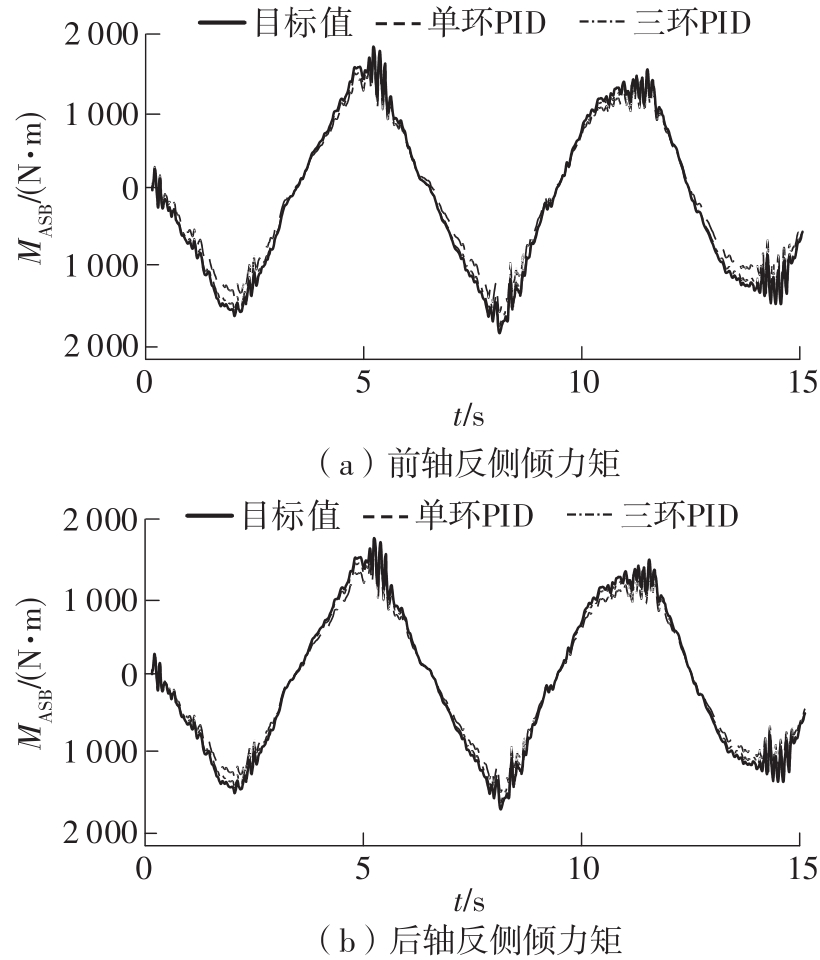
Table 1
Comparison of serpentine working condition"
| 系统类型 | 车身侧倾角 | 侧倾角速度 | 质心侧偏角 | |||
|---|---|---|---|---|---|---|
| 蛇形工况 | 测量值/(°) | 改进比例/% | 测量值/((°)·s-1) | 改进比例/% | 测量值/(°) | 改进比例/% |
| 被动系统 | -3.09 | -6.18 | 3.04 | |||
| PID系统 | -2.05 | 33.66 | -5.90 | 4.53 | 2.83 | 6.91 |
| 自抗扰系统 | -1.45 | 44.14 | -5.51 | 10.84 | 2.78 | 8.55 |
| PSO优化系统 | -0.64 | 79.29 | -3.29 | 46.76 | 2.62 | 13.82 |

Fig.12
Curves of vehicle parameters under double lane changing conditions"


Fig.13
Curves of anti-roll torques under double lane shifting condition"
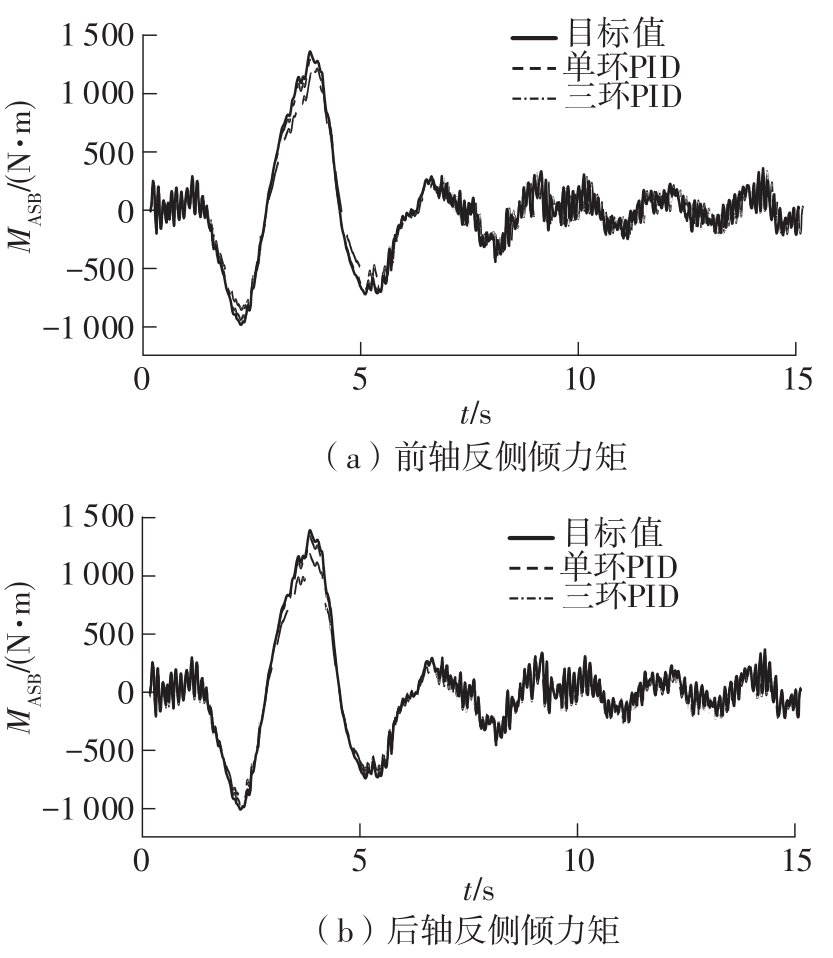
Table 2
Comparison of double line shifting conditions"
| 性能指标 | 车身侧倾角 | 侧倾角速度 | 质心侧偏角 | |||
|---|---|---|---|---|---|---|
| 双移线工况 | 测量值/(°) | 改进比例/% | 测量值/((°)·s-1) | 改进比例/% | 测量值/(°) | 改进比例/% |
| 被动系统 | -2.85 | 10.46 | 4.21 | |||
| PID系统 | -2.21 | 22.46 | 7.81 | 25.33 | 4.10 | 2.61 |
| 自抗扰系统 | -1.70 | 40.59 | 5.78 | 26.64 | 4.02 | 4.98 |
| PSO优化系统 | -1.01 | 64.56 | 4.24 | 59.46 | 3.82 | 9.26 |
| 1 | NGUYEN D N, DANG N D, TRAN T H T,et al .Effect of the passive stabilizer bar on the vehicle’s stability[J].Modelling and Simulation in Engineering,2022(4):5523012/1-8. |
| 2 | 赵强,孙柱 .车辆主动式稳定杆系统的研究现状及展望[J].机电工程,2020,37(5):490-495. |
| ZHAO Qiang, SUN Zhu .Research status and prospects of vehicle active stabilizer bar system [J].Journal of Mechanical & Electrical Engineering,2020,37(5):490-495. | |
| 3 | NGUYEN T A, HOANG T B. Review on the stabilizer bar equipped with the vehicle [J].Journal of Mechanical Engineering Research and Developments,2021,44(6):156-161. |
| 4 | KONG Z, PI D, WANG X,et al .Design and evaluation of a hierarchical control algorithm for an electric active stabilizer bar system [J].Strojniški Vestnik-Journal of Mechanical Engineering,2016,62(10):565-576. |
| 5 | 赵韩,赵福民,黄康,等 .液压马达式汽车主动稳定杆系统建模与控制[J].中国机械工程,2016,27(14):1976-1981. |
| ZHAO Han, ZHAO Fumin, HUANG Kang,et al .Modeling and control of vehicle active stabilizer bar system with hydraulic motor [J].China Mechanical Engineering,2016,27(14):1976-1981. | |
| 6 | 赵强,孙柱 .基于卡尔曼滤波的车辆液压主动横向稳定杆最优控制研究[J].重庆交通大学学报(自然科学版),2020,39(11):128-135. |
| ZHAO Qiang, SUN Zhu .Optimal control of hydraulic active lateral stabilizer of vehicle based on Kalman filter [J].Journal of Chongqing Jiaotong University(Natural Science),2020,39(11):128-135. | |
| 7 | MENG Z, WANG L, SUN Y,et al .Application of switched reluctance motor in vehicle active stabilizer bar [J].Journal of Engineering Science and Technology Review,2019,12(4):168-175. |
| 8 | 李育龙 .电机式主动稳定杆控制系统设计与试验研究[D].南京:南京理工大学,2019. |
| 9 | NGUYEN T A .Preventing the rollover phenomenon of the vehicle by using the hydraulic stabilizer bar controlled by a two-input fuzzy controller [J].IEEE Access,2021,9:129168-129177. |
| 10 | NGUYEN T A .Improving the stability of the passenger vehicle by using an active stabilizer bar controlled by the fuzzy method [J].Complexity,2021,2021:6569298/1-20. |
| 11 | 邱香,吴新宇,陈正科,等 .考虑状态获取的主动前轮转向与主动横向稳定杆多目标集成控制[J].机械科学与技术,2022,41(3):386-393. |
| QIU Xiang, WU Xinyu, CHEN Zhengke,et al .Multi-objective integrated control of active front steering and active anti-roll bar considering state acquisition [J].Mechanical Science and Technology for Aerospace Engineering,2022,41(3):386-393. | |
| 12 | HWANG H Y, LAN T S, CHEN J S .Developing a strategy to improve handling behaviors of a medium-size electric bus using active anti-roll bar [J].Symmetry,2020,12(8):1334/1-33. |
| 13 | 李仲兴,许荣洲,江洪 .稳定杆对互联空气悬架车辆侧倾特性的影响[J].重庆理工大学学报(自然科学),2015,29(9):7-12. |
| LI Zhongxing, XU Rongzhou, JIANG Hong .Effect of stabilizer bar on interconnected air suspension rolling characteristics [J].Journal of Chongqing University of Technology(Natural Science),2015,29(9):7-12. | |
| 14 | STAŃCO M, KOWALCZYK M, DZIALAK P .Numerical and experimental analysis of a front axis stabilizer bar [J].Materials Today:Proceedings,2022,62:2641-2647. |
| 15 | 黄海祺 .叶片式液压摆动油缸结构参数优化及动态性能测试[D].武汉:武汉科技大学,2021. |
| 16 | BRITO A G .Characterization of electrohydraulic actuators:technical and experimental aspects[J].Experimental Techniques,2016,40(2):865-874. |
| 17 | CAI Y, HE Y, ZHOU H,et al .Active damping disturbance rejection control strategy of LCL grid-connected inverter based on inverter-side current feedback [J].IEEE Journal of Emerging and Selected Topics in Power Electronics,2020,PP(99):1-1. |
| 18 | 伍文俊,蔡雨希,兰雪梅 .三电平中点钳位型变换器线性自抗扰离散建模与稳定控制[J].电工技术学报,2020,35(S1):37-48. |
| WU Wenjun, CAI Yuxi, LAN Xuemei .Discrete modeling and stability control of linear active disturbance rejection control for three-level neutral point clamped converter [J].Transactions of China Electrotechnical Society,2020,35(S1):37-48. | |
| 19 | NAZELAN A M, OSMAN M K, SAMAT A A A,et al .PSO-Based PI controller for speed sensorless control of PMSM[J].Journal of Physics:Conference Series,2018,1019:012027/1-12. |
| [1] | WANG Wei, ZHANG Yuan, SHI Shaoyu, SHEN Gang, YANG Wenqing. Excavation Trajectory Planning with Optimal Energy Consumption for Mining Electric Shovel [J]. Journal of South China University of Technology(Natural Science Edition), 2024, 52(12): 52-64. |
| [2] | YU Mingquan, ZHAO Jiyun, MAN Jiaxiang, et al.. Study of Distribution Structure for High Water-Based Hydraulic Motor [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(9): 19-29. |
| [3] | YU Mingquan, ZHAO Jiyun, MAN Jiaxiang, et al.. Study on Flow Distribution Mechanism of Low Speed High Torque Hydraulic Motor [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 101-109. |
| [4] | LI Ying, WANG Bozhong, HE Shuang, et al.. Thickness Distribution of Low Stress Three-Layer Bearing for Cam Lobe Hydraulic Motor [J]. Journal of South China University of Technology(Natural Science Edition), 2023, 51(11): 93-100. |
| [5] | YAO Qiangqiang, TIAN Ying, WANG Shengyuan, et al. Research on Path Tracking Control Strategy of Intelligent Vehicles Based on Force Drive [J]. Journal of South China University of Technology(Natural Science Edition), 2022, 50(2): 33-41,57. |
| [6] |
CHAI Mu Subhash Rakheja SHANGGUAN Wenbin .
Dynamic Analysis of an Articulated Frame Steer Vehicle with Torsio-Elastic Suspension
|
| [7] | JIN Shan JIN Zhi-gang LIU Yong-lei. A KMP-RBF Fusion Method to Forecast Duty Vehicle's Travel Time [J]. Journal of South China University of Technology (Natural Science Edition), 2017, 45(3): 35-41,47. |
| [8] | SHI Bai-jun LIU De-hui LI Zhen-yan. Parameterized Analysis and Optimization of Vehicle Anti-Roll Bar [J]. Journal of South China University of Technology (Natural Science Edition), 2016, 44(6): 98-104,112. |
| [9] | Jong Chanhyok Meng Guang- wei Li Feng Zhou Li- ming Kong Yongsu. Structural Reliability- Based Optimization Design Using PSO- DE Hybrid Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2014, 42(9): 41-45,75. |
| [10] | Lin Mei- jin Luo Fei Xu Yu- ge. Optimization Control of Biochemical Process of Wastewater Based on SFLA and PSO [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(9): 51-57. |
| [11] | Tang He- sheng Yin Yao- bao Wang Kang- jing. Speed- Switching Characteristics of Hydraulic Motor of Excavator with Shift Valve [J]. Journal of South China University of Technology (Natural Science Edition), 2013, 41(11): 79-84. |
| [12] | Zhang Quan Wen Hui-ying Sun Bo. Improved Particle Swarm Optimization Algorithm of Ergodic Model for Routing Planning of Delivery Vehicle Navigation [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(8): 109-112,117. |
| [13] | Sun Zhi-bin Yang Xiao-li Huang Fu. Inversion Analysis of Slope Parameters Based on Fuzzy Mathematics and Particle Swarm Optimization Algorithm [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(6): 137-141. |
| [14] | . Nonlinear Model for Fleet Planning Considering Ship Speed [J]. Journal of South China University of Technology (Natural Science Edition), 2011, 39(10): 119-126. |
| [15] | Lü Jun. Electrode Selection of Brain-Computer Interface Based on CSP-BPSO [J]. Journal of South China University of Technology (Natural Science Edition), 2010, 38(10): 7-13. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||