
收稿日期: 2024-08-19
网络出版日期: 2024-10-29
基金资助
国家重点研发计划项目(2020YFC1512103);湖南大学整车先进设计制造技术全国重点实验室自主研究项目(72275005)
A Quick Coupling Device with Free Posture Adjustment Used for Emergency Rescue Robot Attachments
Received date: 2024-08-19
Online published: 2024-10-29
Supported by
the National Key Research and Development Program of China(2020YFC1512103)
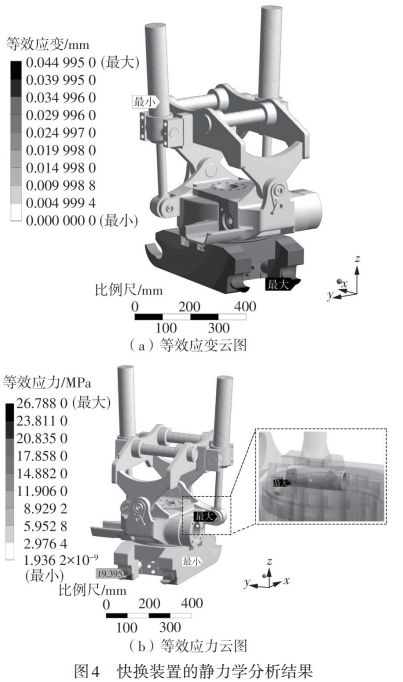
现有应急救援装备功能单一、灵活性不高,难以满足地震等地质灾害下的复杂应急作业需求。鉴于此,该文设计了一种可实现属具快速切换及位姿自由调整的机电液快换装置,该装置可快速集成到应急救援装备上完成高机动、多功能救援作业任务。首先,模拟分析了快换装置的极端受载特性及工作过程中的应力、应变情况,确定了装置的薄弱位置及载荷谱;然后,推导建立了确定性与随机性周期应力作用下考虑循环损伤强度退化的可靠性理论模型,明确了快换装置回转机构可靠度与失效率的映射关系;接着,基于线弹性断裂力学分析了倾斜油缸活塞杆薄弱件的裂纹扩展情况,采用局部应力应变法确定了快换装置的疲劳寿命,确保快换装置满足使用要求;最后,将快换装置集成到步履式救援机器人上进行测试和验证。结果表明,该快换装置可实现挖斗、抓手等各种属具的快速切换,切换时间小于15 s,同时增加了±40°的偏摆和±360°的旋转自由度,可满足多自由度灵活作业需求。该文研究成果可为同类快换装置的设计提供理论参考。
李伟 , 刘嘉晨 , 张伟源 , 黄日红 , 白晶 , 姜潮 . 一种可实现位姿自由调整的应急救援机器人属具快换装置[J]. 华南理工大学学报(自然科学版), 2025 , 53(5) : 11 -19 . DOI: 10.12141/j.issn.1000-565X.240408
Due to its single function and low flexibility, the existing emergency rescue equipment is difficult to meet the requirements of complex emergency operations under geological disasters such as earthquake. To solve this problem, an electromechanical hydraulic quick coupling device, which can realize fast change of attachments and free adjustment of posture, is designed. The device can be quickly integrated into emergency rescue equipment to complete high-mobility and multi-function rescue tasks. In the investigation, first, the extreme load characteristics, as well as the stress and strain situations during the operation of the device are simulated and analyzed, through which the weak part and load spectrum are determined. Then, the reliability theoretical models considering cyclic damage strength degradation under deterministic and random periodic stress are deduced and established, and the mapping relationship between the reliability and the failure rate of the rotating mechanism is determined. Furthermore, based on linear elastic fracture mechanics, the crack propagation of the weak part of inclined oil cylinder’s piston rod is analyzed, and the fatigue life of the device is determined via the local stress strain method to ensure that the device can meet the application requirements. Finally, the developed device is integrated into the walking rescue robot. Test results show that the proposed quick coupling device can realize the rapid switching of various attachments such as bucket and gripper, with a switching time of less than 15 s, as well as the increases by ±40° yaw and ±360° rotation degrees of freedom, thus meeting the requirements of flexible operation. This research provides theoretical reference for the design of similar devices.
| 1 | 董炳艳,赵自强,徐兰军,等 .智能应急救援装备研究现状与发展趋势[J].机械工程学报,2020,56(11):1-25. |
| DONG Bingyan, ZHAO Ziqiang, XU Lanjun,et al .Research status and development trend of intelligent emergency rescue equipment[J].Journal of Mechanical Engineering,2020,56(11):1-25. | |
| 2 | 汤志东,贠超 .全自动快换装置快速接头技术综述[J].浙江大学学报(工学版),2017,51(3):461-470. |
| TANG Zhidong, YUN Chao .Quick action coupling technology in full-automatic quick coupling device: a review[J].Journal of Zhejiang University (Engineering Science),2017,51(3):461-470. | |
| 3 | 汤志东,贠超 .全自动快换装置精准对接技术[J].北京航空航天大学学报,2017,43(9):1859-1872. |
| TANG Zhidong, YUN Chao .Precise docking technology in full-automatic quick hitch coupling device[J].Journal of Beijing University Aeronautics and Astronautics,2017,43(9):1859-1872. | |
| 4 | MARCEL W, MARKUS L, HEIKO K .Device for conducting hydraulic fluid:US 17/289342[P].2021-09-08. |
| 5 | JONSSON A .Control systems for an excavator and methods for controlling an excavator with a movable excavator thumb and an auxiliary tool hold by an tiltrotator:US 16/606566[P].2021-04-01. |
| 6 | 杨淞麟,刘满禄,张俊俊,等 .核应急机器人末端工具快换装置的设计及分析[J].机械设计,2021,38(7):56-62. |
| YANG Song-lin, LIU Man-lu, ZHANG Jun-jun,et al .Design and analysis of the end-effector’s quick-change device for nuclear emergency-response robots[J].Journal of Machine Design,2021,38(7):56-62. | |
| 7 | 尚海兴 .全自动液压手腕设计研究[D].马鞍山:安徽工业大学,2021. |
| 8 | 李亮 .破拆机器人快捷液压手腕设计与仿真研究[D].马鞍山:安徽工业大学,2017. |
| 9 | WANG P, XIANG Q, KRóLCZYK G,et al .Dynamic modeling of a hydraulic excavator stick by introducing multi-case synthesized load spectrum for bench fatigue test[J].Machines,2022,10(9):741/1-15. |
| 10 | CAO L, CAO L, GUO L,et al .Reliability estimation for drive axle of wheel loader under extreme small sample[J].Advances in Mechanical Engineering,2019,11(3):1-12. |
| 11 | 曹蕾蕾,郭城臣,王严,等 .基于实测数据的挖掘机工作装置疲劳寿命评估[J].华南理工大学学报(自然科学版),2021,49(8):122-128,139. |
| CAO Leilei, GUO Chengchen, WANG Yan,et al .Fatigue analysis of hydraulic excavator working device based on experiment data[J].Journal of South China University of Technology (Natural Science Edition),2021,49(8):122-128,139. | |
| 12 | 曹蕾蕾,王留涛,王严,等 .基于等效结构应力法的挖掘机工作装置疲劳寿命评估[J].华南理工大学学报(自然科学版),2022,50(8):62-70. |
| CAO Leilei, WANG Liutao, WANG Yan,et al .Fatigue life evaluation of excavator working device based on equivalent structural stress method[J].Journal of South China University of Technology (Natural Science Edition),2022,50(8):62-70. | |
| 13 | 《机械工程材料性能数据手册》编委会 .机械工程材料性能数据手册[M].北京:机械工业出版社,1995. |
| 14 | 赵少汴 .抗疲劳设计[M].北京:机械工业出版社,1994. |
| 15 | 闻邦椿 .机械设计手册:第6卷[M].6版.北京:机械工业出版社,2020. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

