
收稿日期: 2022-10-24
网络出版日期: 2023-06-21
基金资助
天津市交通运输科技发展计划项目(2021-29);桥梁结构安全技术国家工程实验室开放课题(2019-QKF02);旧桥检测与加固技术交通行业重点实验室(北京)开放课题(2020-JQKFKT-3)
Optimized Design of the Main Structure of a Wall-Climbing Robot for Bridge Detection Based on Negative Pressure Adsorption
Received date: 2022-10-24
Online published: 2023-06-21
Supported by
the Tianjin Transportation Technology Development Plan(2021-29);the Open Project of National Engineering Laboratory of Bridge Structure Safety Technology(2019-QKF02)
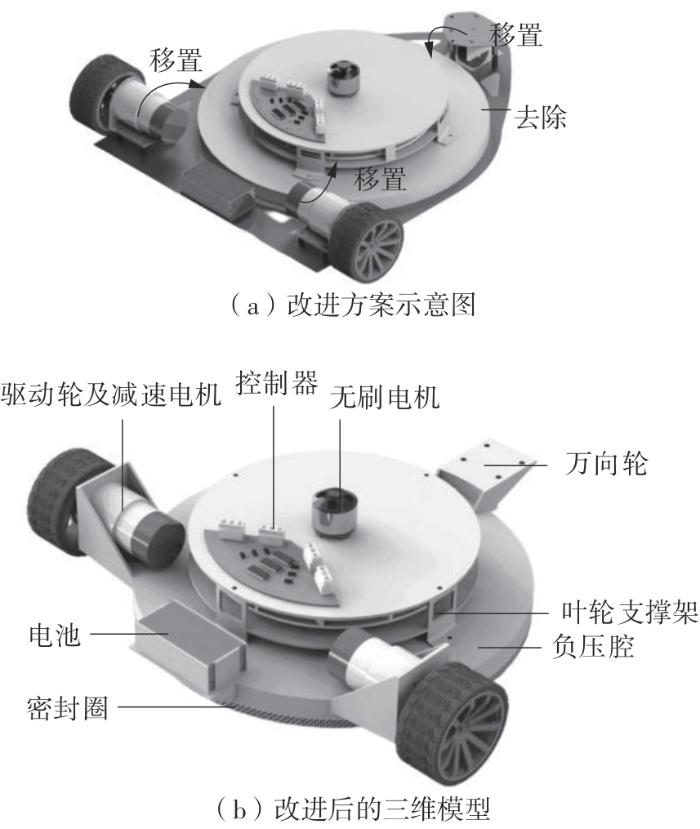
针对桥梁高墩、梁底等区域检测困难的问题,设计开发了一款基于负压吸附的桥梁病害检测爬壁机器人。针对其自身的吸附稳定性,建立并推导了满足抗滑移和抗倾覆条件下的吸附力指标计算式,据此确定能在各角度壁面实现稳定吸附时机器人所需的最小吸附力。结果表明:为确保机器人可靠工作,吸附模块需提供53.0 N的吸附力;结合经验公式给出离心叶轮的初步设计方案并利用Fluent对叶轮流域进行流体力学仿真及响应面优化,建立了由吸附力与扭矩共同构成的评价函数,并给出了函数值最佳时的叶轮设计参数,使吸附模块在满足稳定性的前提下,综合评价函数值较初设方案提升了3.4 %;对负压腔进行拓扑优化,综合考虑拓扑优化结果及负压腔气动性能,获得了腔体内加强肋的构造及布置形式,其中与车轮支撑臂相衔接的加劲肋为“八”字形与直线型镂空构造设计;优化后负压腔的最大竖向位移值减小为原模型的18.5 %,而质量仅增加了16.9 %,加强肋的精准布设效果明显,成功将竖向变形控制在了合理的范围内。最后,利用UTR6180型光敏树脂借助3D打印工艺完成了样机制作,其尺寸约为300 mm×280 mm×15 mm,质量约为1.15 kg。将样机置于多工况下进行性能测试,结果表明:本研究设计开发的爬壁机器人可在多种桥梁壁面稳定吸附并行进,不存在打滑、漂移现象。
黄海新, 王峥, 程寿山, 等 . 负压吸附桥梁检测爬壁机器人的本体结构优化设计[J]. 华南理工大学学报(自然科学版), 2023 , 51(12) : 21 -33 . DOI: 10.12141/j.issn.1000-565X.220695
To address the challenging task of inspecting hard-to-reach areas, such as high piers and the bottom of bridges, the paper developed a wall-climbing robot for bridge disease detection based on negative pressure adsorption. For the robot’s own adsorption stability, this paper established and derived a formula for calculating the adsorption force index under conditions of anti-slip and anti-overturning, based on which the minimum adsorption force required by the robot to achieve stable wall adsorption at all angles was determined. The results show that to ensure the reliable operation of the robot, the adsorption module needs to provide 53.0 N adsorption force. The preliminary design of the centrifugal impeller was formulated based on empirical principles, followed by fluid mechanics simulation and response surface optimization of the impeller basin using Fluent. An evaluation function, comprising adsorption force and torque, was established to optimize the impeller design parameters to maximize the comprehensive evaluation function value of the adsorption module. Compared to the initial design scheme, the optimized design achieved a 3.4% increase in the evaluation function value while maintaining stability. Taking into consideration the aerodynamic performance of the chamber along with the topology optimization results, topology optimization of the negative pressure chamber was performed. The structure and arrangement of reinforcing ribs inside the chamber were obtained, with the reinforcing ribs connected to the wheel support arm designed in “八”-shaped and linear hollow structures. This optimization reduced the maximum vertical displacement of the negative pressure chamber to 18.5% of the original model, with a minimal increase in mass of 16.9%. It shows that the precise layout effect of the strengthening rib is obvious, and the vertical deformation is successfully controlled within a reasonable range. Finally, a prototype was constructed using UTR6180 photosensitive resin and 3D printing technology, with approximate dimensions of 300 mm×280 mm×15 mm and a mass of approximately 1.15 kg. The performance test of the prototype was conducted under various working conditions, demonstrating that the wall-climbing robot can stably adsorb and move on various bridge walls without slipping or drifting.
| 1 | 戴若星 .公路桥梁定期检查评定系统研究与开发[D].石家庄:石家庄铁道大学,2021. |
| 2 | 戴启凡 .桥梁检测爬壁机器人及其自适应控制技术研究[D].南京:南京理工大学,2014. |
| 3 | 杨衍舒 .桥底检测爬壁机器人控制系统开发[D].南京:南京理工大学,2013. |
| 4 | 贺拴海,王安华,朱钊,等 .公路桥梁智能检测技术研究进展[J].中国公路学报,2021,34(12):12-24. |
| HE Shuanhai, WANG Anhua, ZHU Zhao,et al .Research progress of intelligent detection technology for highway bridges[J].China Journal of Highway and Transport,2021,34(12):12-24. | |
| 5 | 刘理,王耀南,张辉,等 .桥梁检测机器人作业规划与位姿优化方法研究[J].仪器仪表学报,2019,40(7):147-158. |
| LIU Li, WANG Yaonan, ZHANG Hui,et al .Research on operation planning and position & pose optimization method for bridge inspection robot[J].Chinese Journal of Scientific Instrument,2019,40(7):147-158. | |
| 6 | FANG Y, WANG S, BI Q,et al .Design and technical development of wall-climbing robots:a review[J].Journal of Bionic Engineering,2022,19(4):877-901. |
| 7 | NISHI A .Development of wall-climbing robots[J].Computer & Electrical Engineering,1996,22(2):123-149. |
| 8 | ALTAF M, EBALL A, XU Y R,et al .Design of a climbing robot platform with protection device[J].International Journal of Advanced Robotic Systems,2017,14(4):1-14. |
| 9 | 滕迪 .负压爬壁机器人及其控制技术研究[D].北京:北京理工大学,2016. |
| 10 | 张明亮 .负压吸附式船舶清洗爬壁机器人关键技术研究[D].北京:北京理工大学,2018. |
| 11 | 任志奇 .负压吸附式爬壁机器人的设计与研究[D].北京:华北电力大学,2018. |
| 12 | 姜瑞华 .履带式爬壁机器人吸附装置流体动力学分析及优化研究[D].长春:吉林大学,2021. |
| 13 | 余凡 .轻量化负压爬壁机器人的设计与研究[D].昆明:昆明理工大学,2021. |
| 14 | 李轩 .高比转速离心通风机内部流动损失机理及优化设计研究[D].西安:西安理工大学,2019. |
| 15 | 成心德 .离心通风机[M].北京:化学工业出版社,2007. |
| 16 | 陈国雄,曹阳,张大斌,等 .角钢法兰焊接机器人龙门架结构静动态特性与轻量化研究[J].现代制造工程,2022(9):62-71. |
| CHEN Guoxiong, CAO Yang, ZHANG Dabin,et al .Research on static and dynamic characteristics and lightweight of gantry structure of angle steel flange welding robot[J].Modern Manufacturing Engineering,2022(9):62-71. | |
| 17 | BAIZHUMA Z, KIM T,SON C .Numerical method to predict ice accretion shapes and performance penalties for rotating vertical axis wind turbines under icing conditions[J].Journal of Wind Engineering and Industrial Aerodynamics,2021,216:104708/1-14. |
| 18 | ZAREI A, ROOHOLAMINI H, OZBAKKALOGLU T .Evaluating the properties of concrete pavements containing crumb rubber and recycled steel fibers using response surface methodology[J].International Journal of Pavement Research and Technology,2022,15(2):470-484. |
| 19 | 陈洪武,田铖,彭聪聪 .基于Box-Behnken法的曲柄结构优化设计[J].机械强度,2017,39(5):1220-1223. |
| CHEN Hongwu, TIAN Cheng, PENG Congcong .Optimal design of crank based on Box-Behnken method[J].Journal of Mechanical Strength,2017,39(5):1220-1223. | |
| 20 | KALLIAS A N, RAFIQ M I .Performance assessment of corroding RC beams using response surface methodology[J].Engineering Structures,2013,49:671-685. |
| 21 | AGRAWAL M, SARAF S, PRADHAN M,et al .Design and optimization of curcumin loaded nano lipid carrier system using Box-Behnken design[J].Biomedicine & Pharmacotherapy,2021,141:111919/1-13. |
| 22 | 骆清国,尹洪涛,宁兴兴 .基于综合评价函数的冷却风扇蜗壳多参数优化[J].兵工学报,2016,37(4):584-590. |
| LUO Qingguo, YIN Hongtao, NING Xingxing .Multi-parameter optimization of cooling fan volute based on comprehensive evaluation function[J].Acta Armamentarii,2016,37(4):584-590. | |
| 23 | 赖欣,师靖远,彭天宇,等 .爬壁机器人变密度拓扑优化吸附结构研究[J].机械科学与技术,2021,40(6):821-827. |
| LAI Xin, SHI Jingyuan, PENG Tianyu,et al .Research on adsorption structure of wall climbing robot with variable density topology optimization[J].Mechanical Science and Technology for Aerospace Engineering,2021,40(6):821-827. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

