华南理工大学学报(自然科学版) ›› 2025, Vol. 53 ›› Issue (11): 77-89.doi: 10.12141/j.issn.1000-565X.240581
基于曲线组合与数值优化的狭窄通道平行泊车路径规划方法
程国柱, 薛道安, 顾爽
- 东北林业大学 土木与交通学院,黑龙江 哈尔滨 150040
Path Planning Method Integrating Curve Combination and Numerical Optimization for Parallel Parking on Narrow Road
CHENG Guozhu, XUE Daoan, GU Shuang
- School of Civil Engineering and Transportation,Northeast Forestry University,Harbin 150040,Heilongjiang,China
摘要:
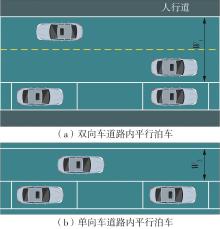
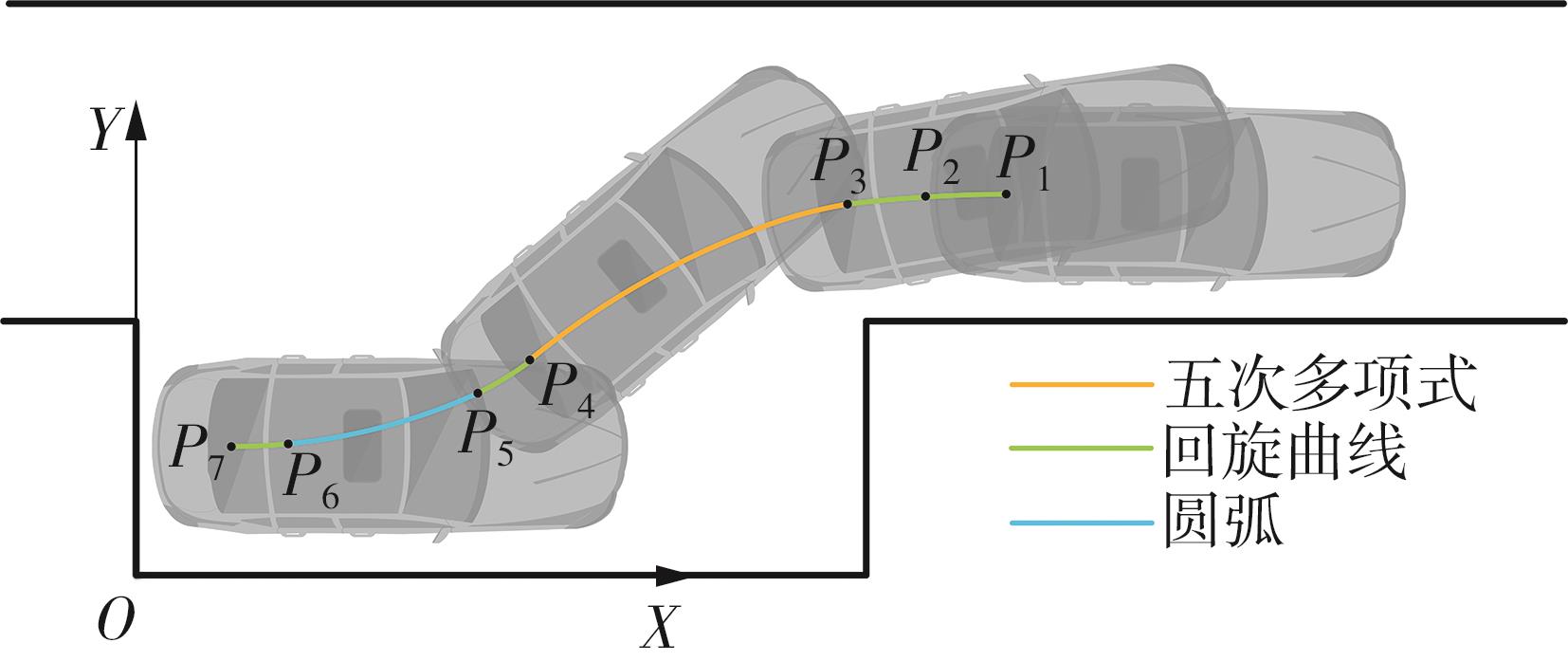
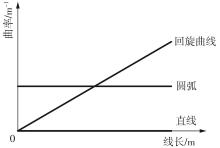
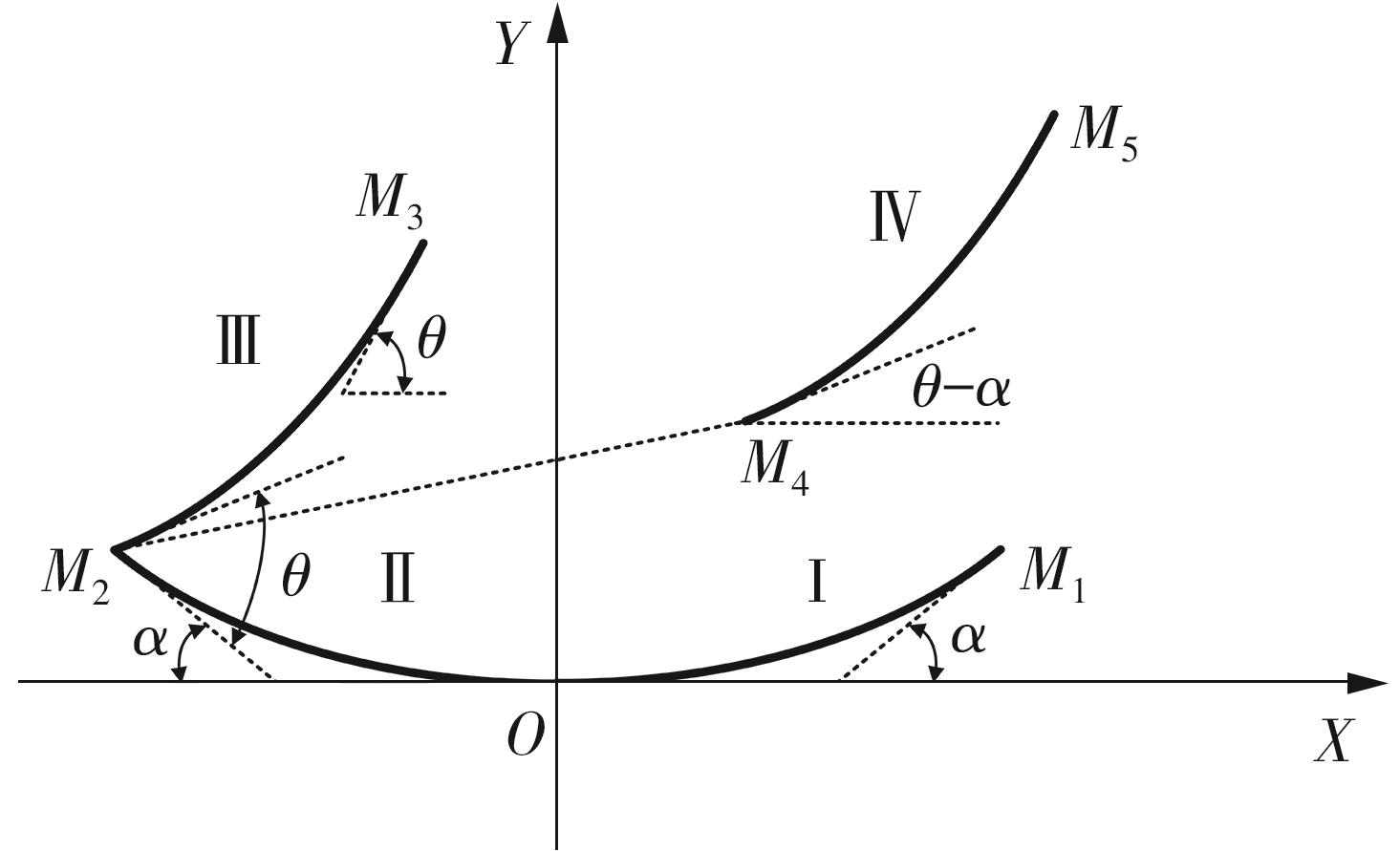
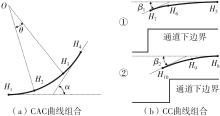
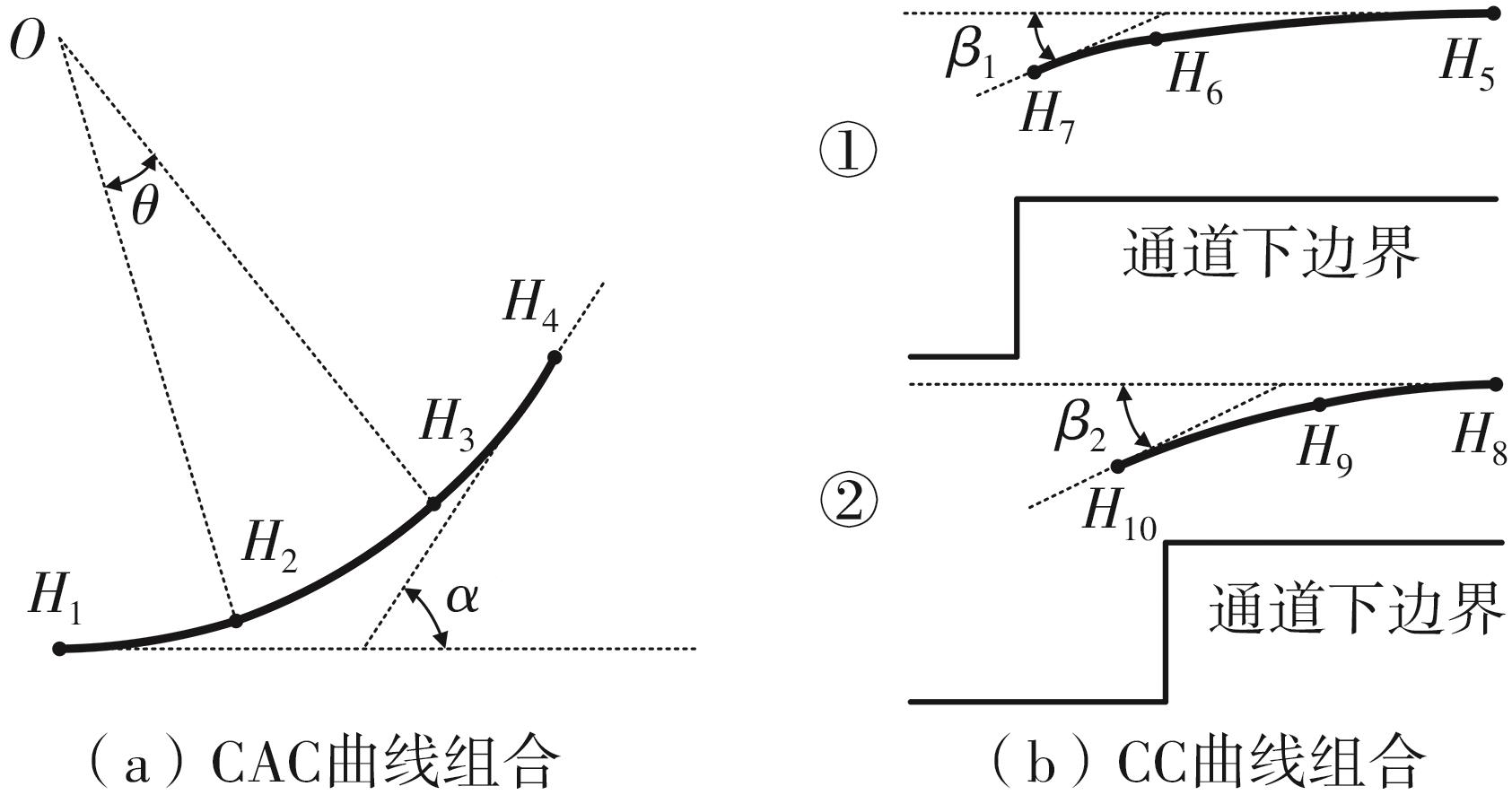
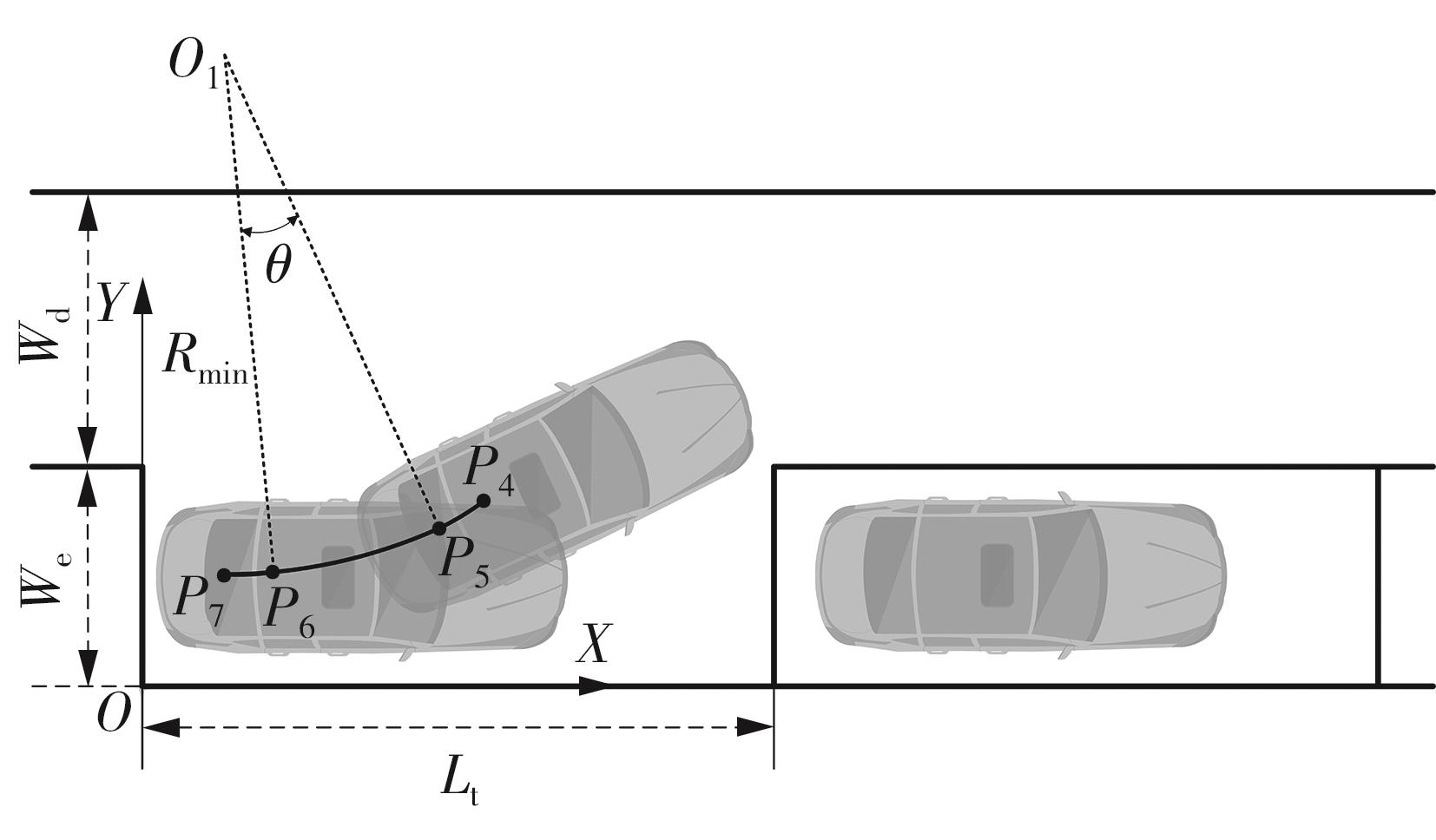
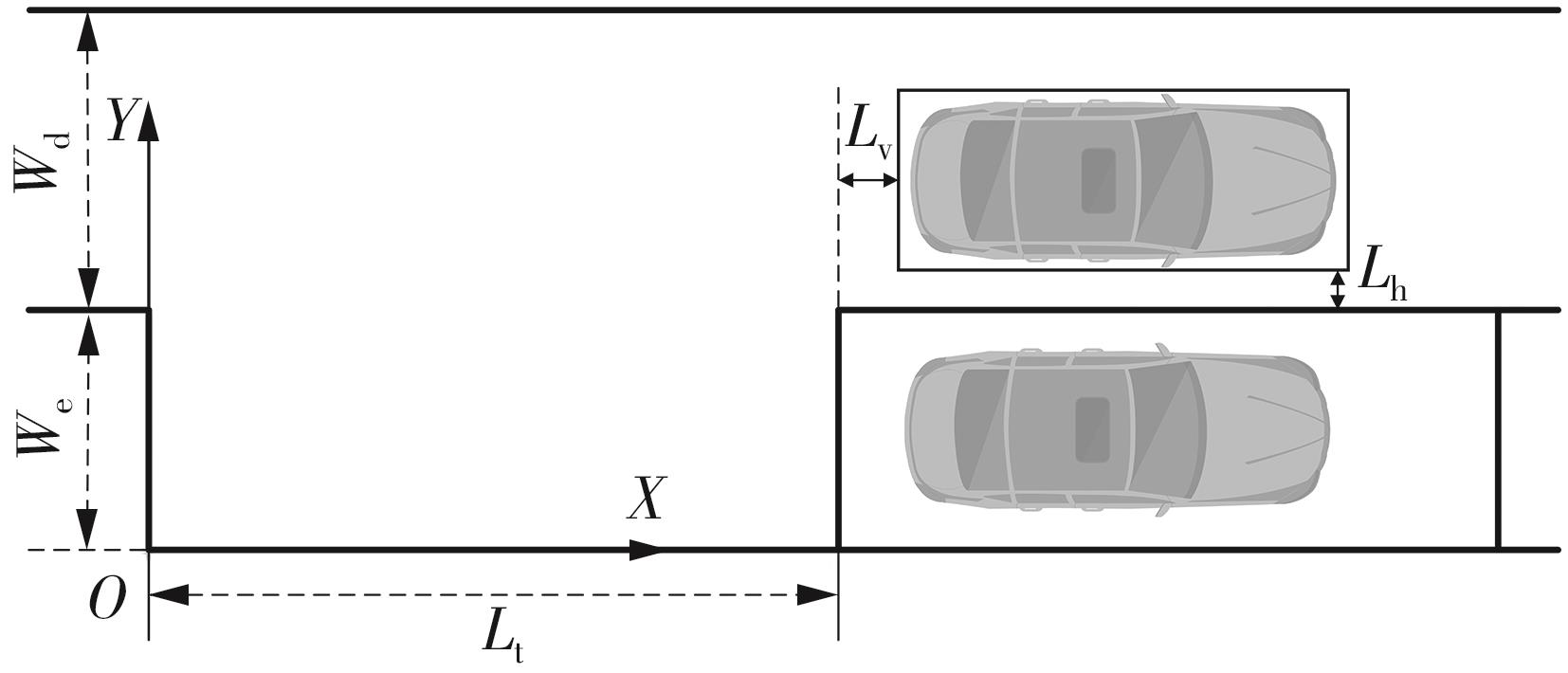
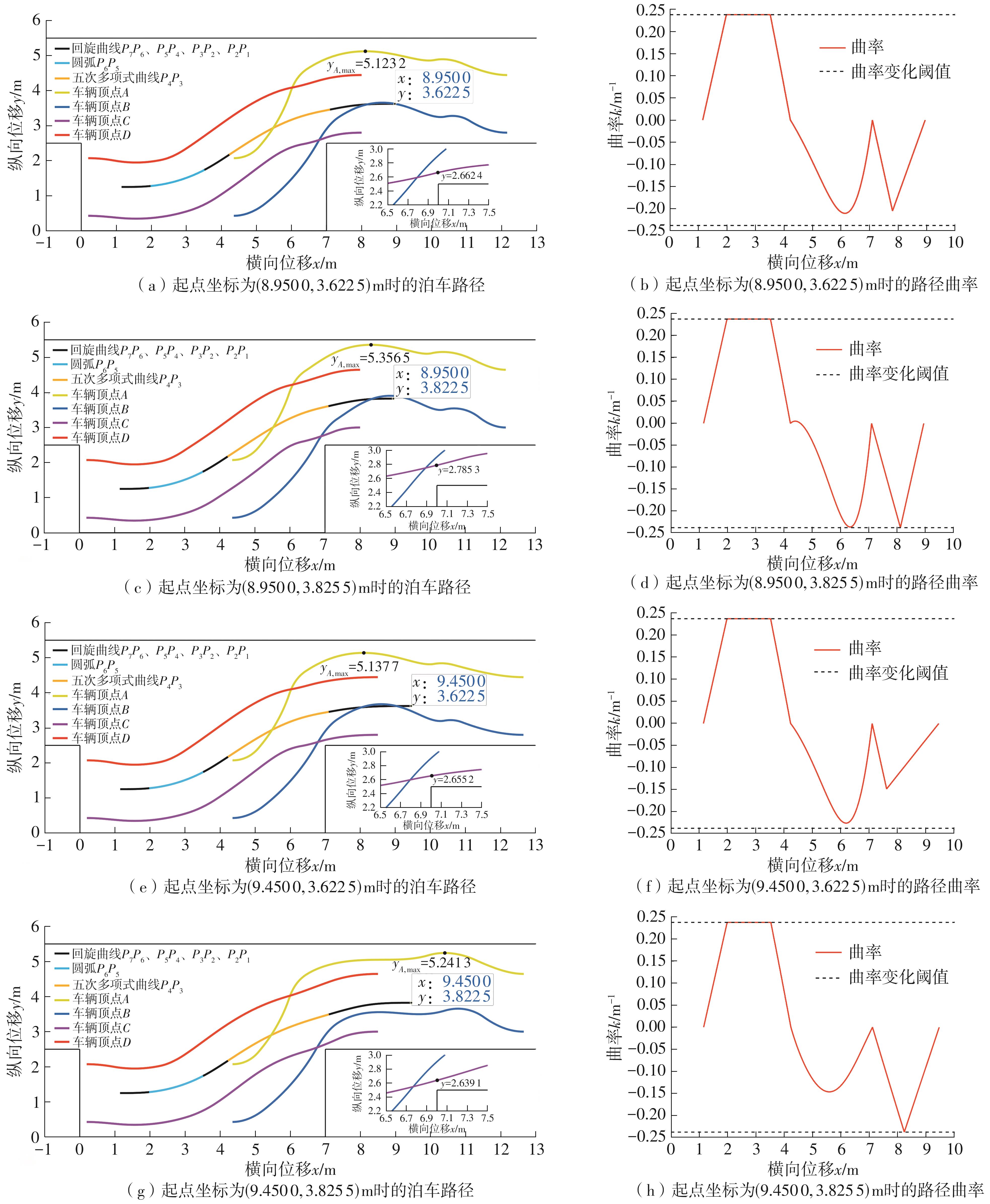
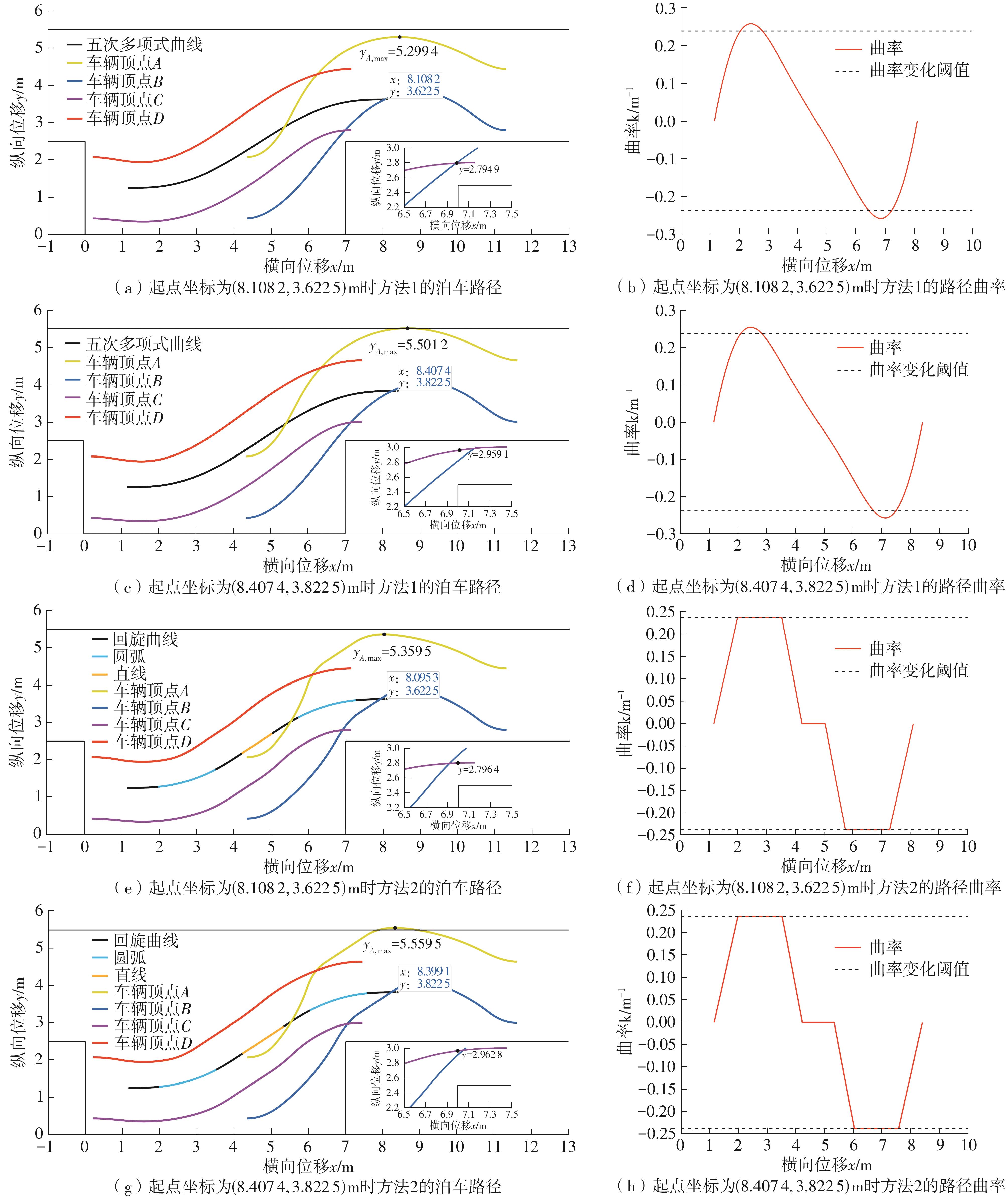
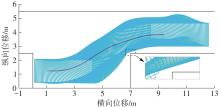
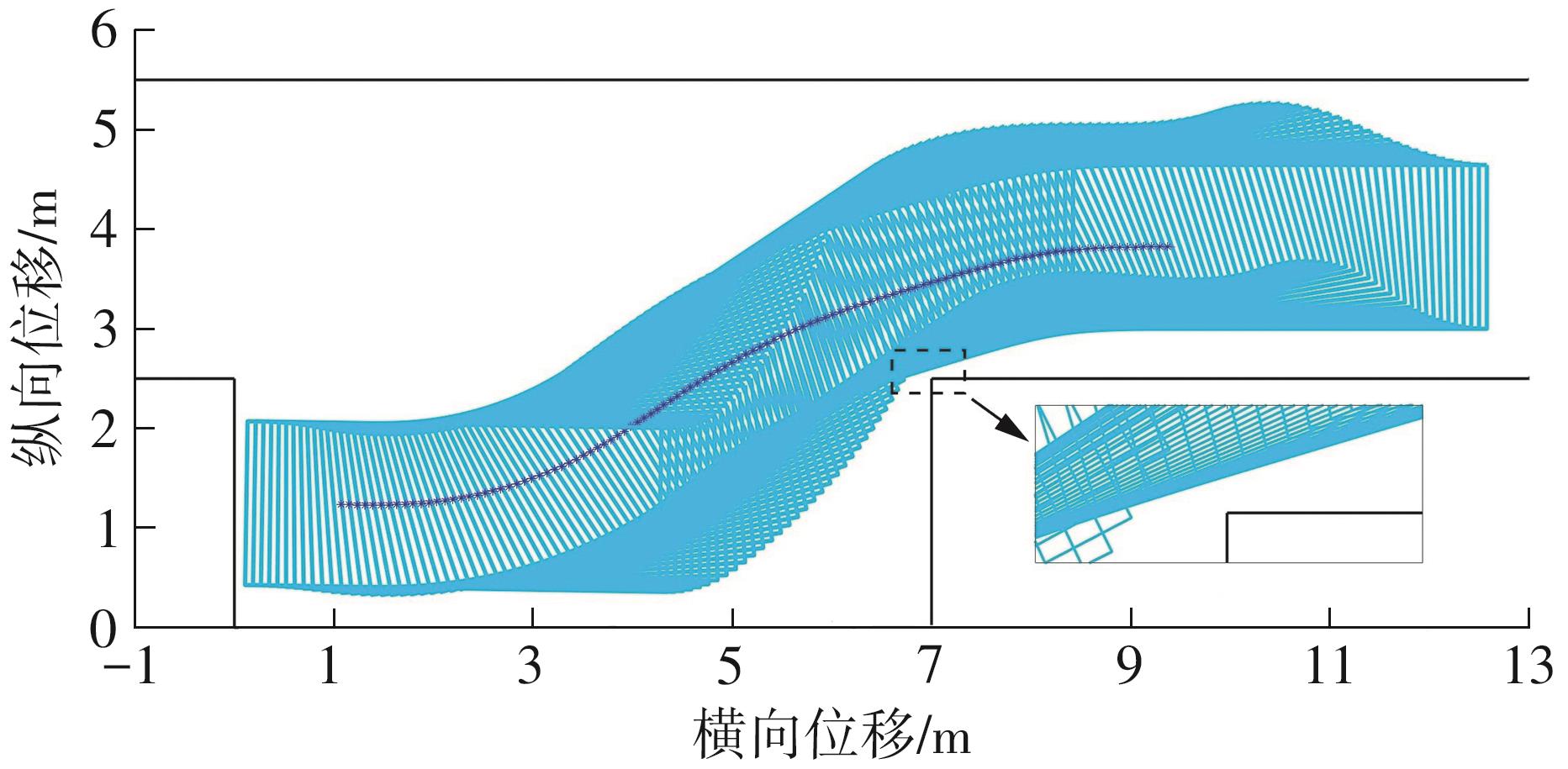
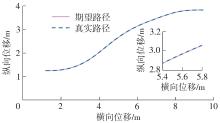
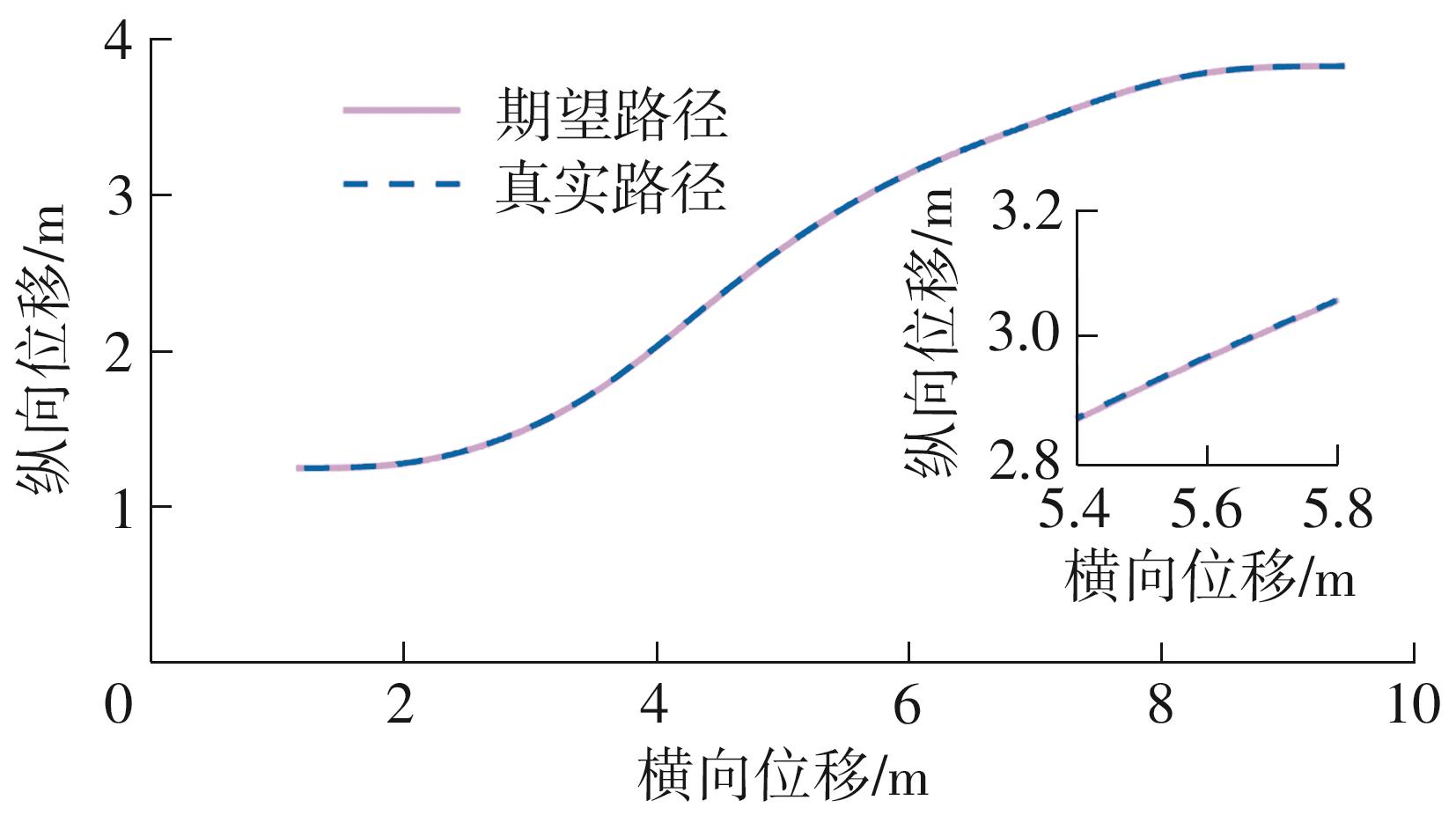
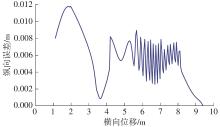
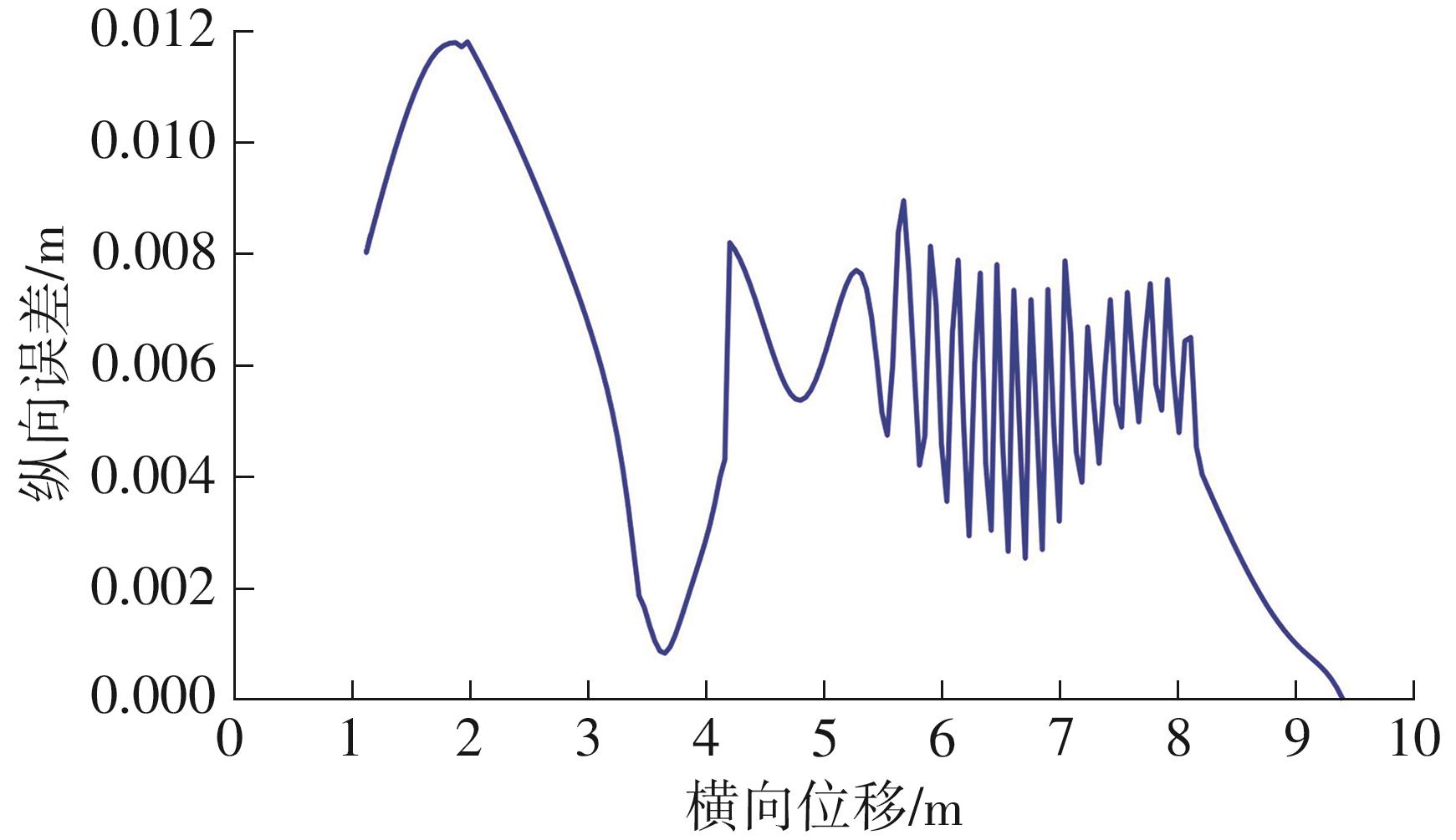
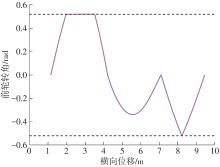
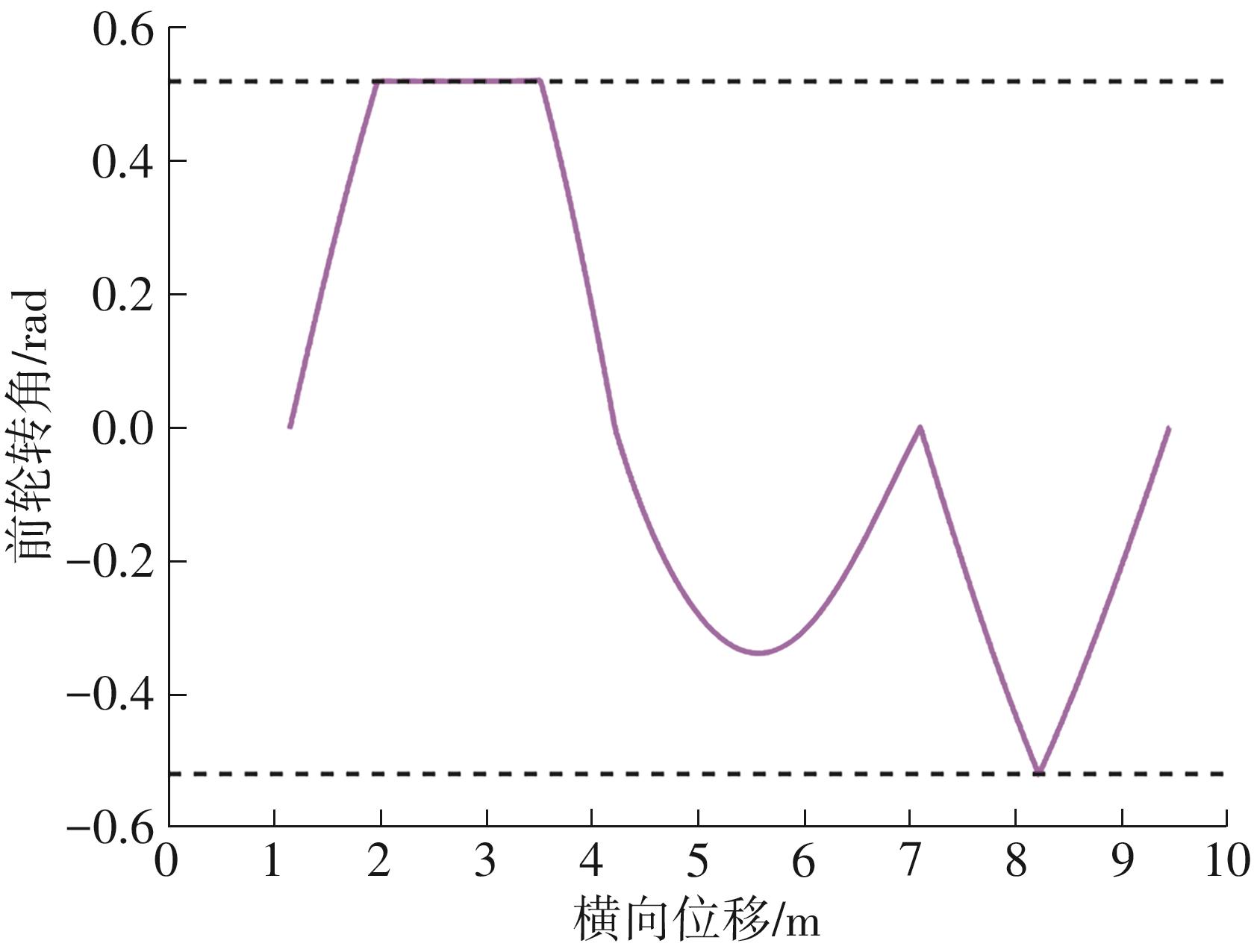
针对城市狭窄通道场景中平行泊车时存在的路径曲率突变、碰撞风险高及多次调整等问题,该文提出一种基于曲线组合与数值优化的三段式单步路径规划方法,以优化车辆的转向性能与动态避障能力,提升泊车效率和安全性。首先,基于圆弧与回旋曲线的曲率特性,设计CAC(回旋曲线‒圆弧‒回旋曲线)与CC(回旋曲线‒回旋曲线)两类曲线组合;然后,将泊车过程逆向化,采用CAC曲线组合设计终点段路径,再构建基于CC曲线组合的约束优化模型来规划起点段路径,并引入五次多项式曲线设计中间段路径;最后,采用Matlab在拟可行区域内进行多工况仿真试验。结果表明:该方法能够在通道宽度仅为3 m的狭窄场景中规划出无碰撞、曲率连续的可行路径,且占用的通道较窄;相较于五次多项式曲线和“圆弧‒回旋曲线‒直线”方法,该方法在路径平滑性、避障能力及空间利用率等方面均具有显著优势;模型预测控制跟踪实验显示,车辆能够精准跟踪规划路径且前轮转角连续变化,验证了该方法的有效性。所提出的三段式单步路径规划方法为狭窄通道场景中的平行泊车提供了高效、安全的解决方案,可提高泊车效率,从而有效缓解路边泊车造成的交通阻塞,对提升城市交通效率具有实际意义。
中图分类号: