华南理工大学学报(自然科学版) ›› 2025, Vol. 53 ›› Issue (7): 31-38.doi: 10.12141/j.issn.1000-565X.240427
所属专题: 2025年机械工程
基于多目近红外视觉的多目标实时跟踪方法
陈忠, 王傲辰, 高心怡, 何利辉, 张宪民
- 华南理工大学 机械与汽车工程学院,广东 广州 510640
Multi-Object Real-Time Tracking Method Based on Multi-View Near-Infrared Vision
CHEN Zhong, WANG Aochen, GAO Xinyi, HE Lihui, ZHANG Xianmin
- School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,Guangdong,China
摘要:
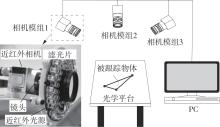
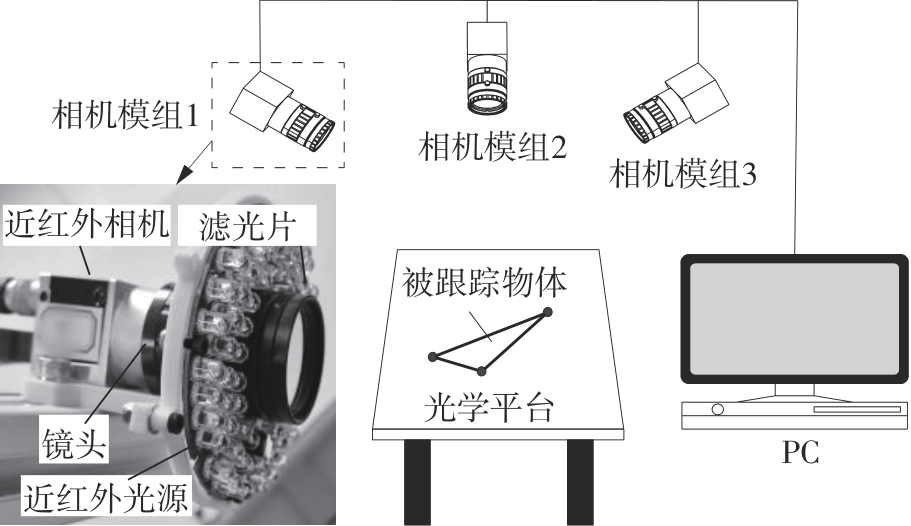
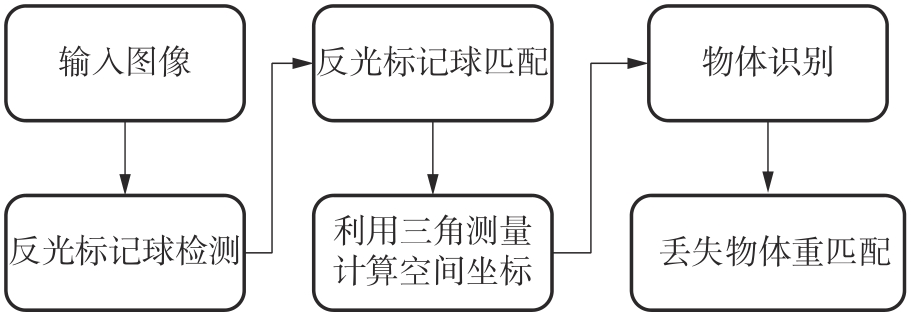
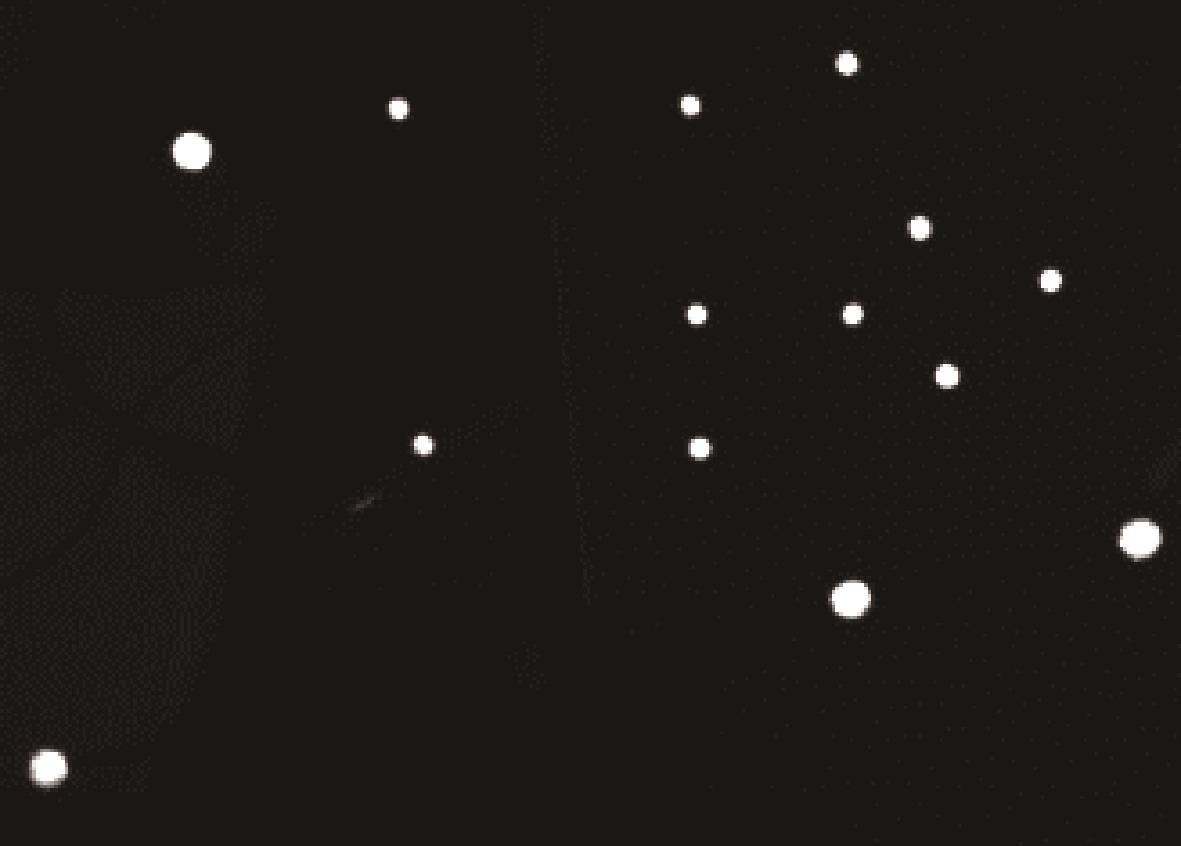
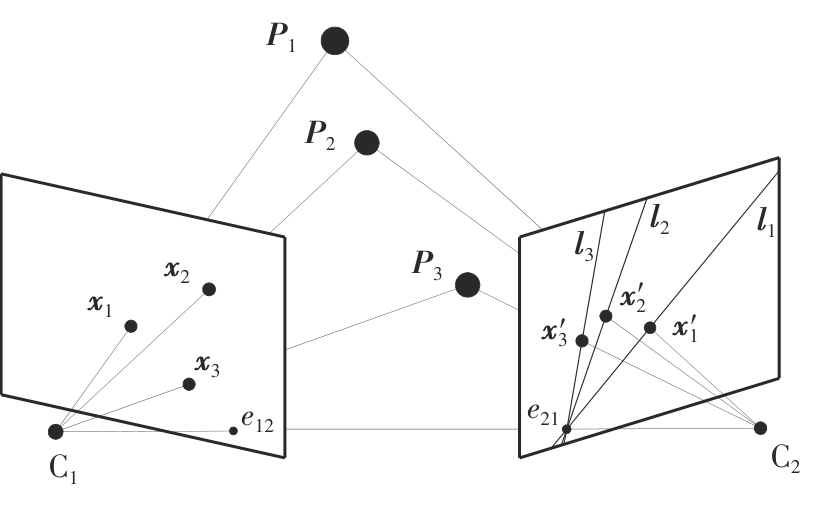
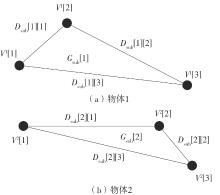
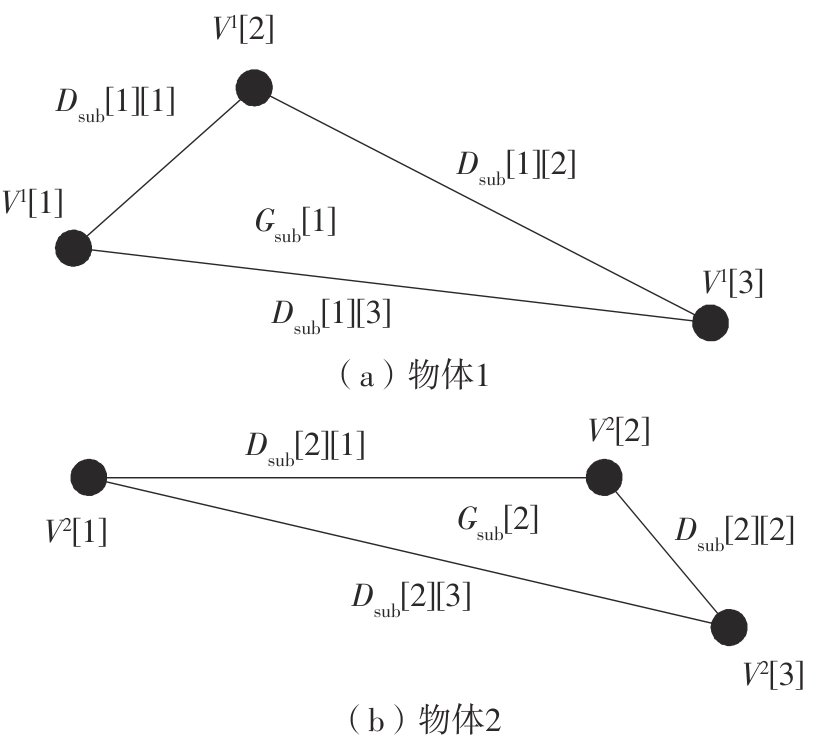
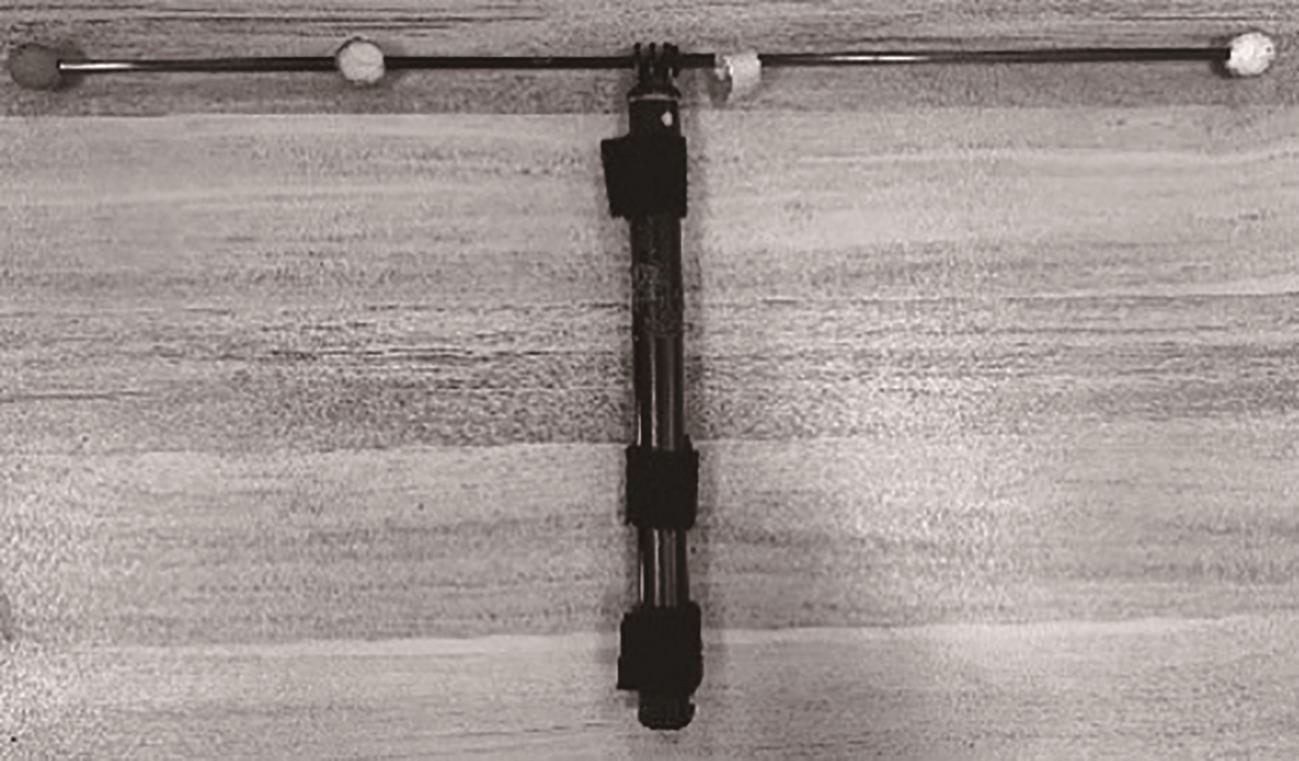
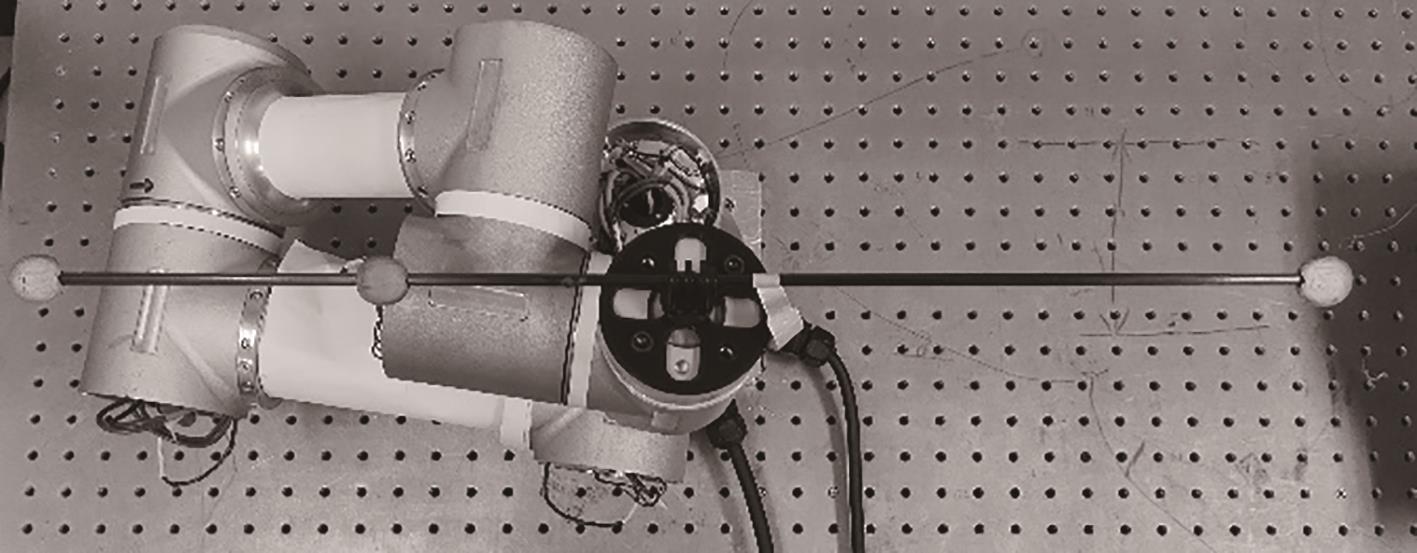
近红外光学跟踪系统能够根据附着于被跟踪物体上的反光标记球实时还原被跟踪物体的运动,目前已被广泛应用于多种领域。该研究提出了一种对目标丢失具有一定鲁棒性的多目近红外目标实时跟踪方法。首先,针对反光标记球在近红外相机中的成像特性,利用灰度质心法提取各个反光标记球的几何中心,然后在各单目相机中使用SORT算法作为多目标跟踪方法对各个标记点进行帧间匹配,并根据对极几何原理,结合带权二分图匹配方法确定反光标记球在各个相机中像点的匹配关系,依据三角测量方法实时计算各个受跟踪反光标记球的三维空间坐标;其次,根据运动过程中各反光标记球之间的空间位置关系对反光标记球进行分组,识别属于同一物体的反光标记球,并根据同组反光标记球间的欧氏距离建立被跟踪物体与反光标记球的外观特征向量,以此作为物体丢失重现的匹配依据,而完全丢失后再重现的被跟踪物体利用外观特征向量的余弦距离进行重匹配;最后,对所提方法进行实验验证。实验结果表明:所提方法在不小于60 f/s的帧率下的跟踪精度约可达0.5 mm;另外,其可以对丢失的重现物体以及反光标记球进行正确的重匹配。
中图分类号: