华南理工大学学报(自然科学版) ›› 2023, Vol. 51 ›› Issue (7): 129-138.doi: 10.12141/j.issn.1000-565X.220583
所属专题: 2023年交通运输工程
基于激光雷达里程计的高速公路三维建模方法
黄炎1 符锌砂1 曾彦杰2 李百建1
- 1.华南理工大学 土木与交通学院,广东 广州 510640
2.广东省交通运输规划研究中心,广东 广州 510101
3D Modeling Method of Highway Based on Lidar Odometer
HUANG Yan1 FU Xinsha1 ZENG Yanjie2 LI Baijian1
- 1.School of Civil Engineering and Transportation,South China University of Technology,Guangzhou 510640,Guangdong,China
2.Guangdong Provincial Transport Planning and Research Center,Guangzhou 510101,Guangdong,China
摘要:
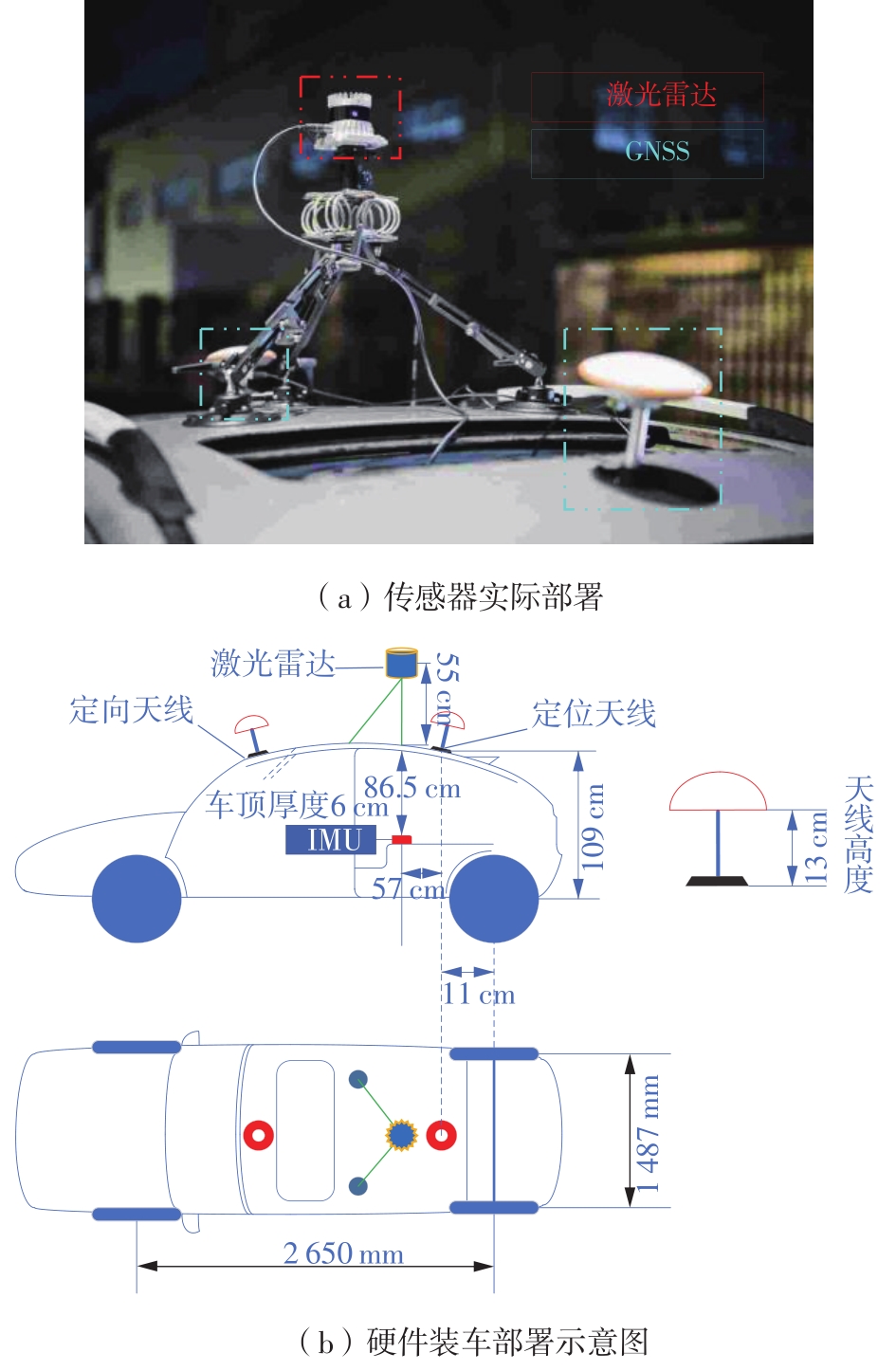
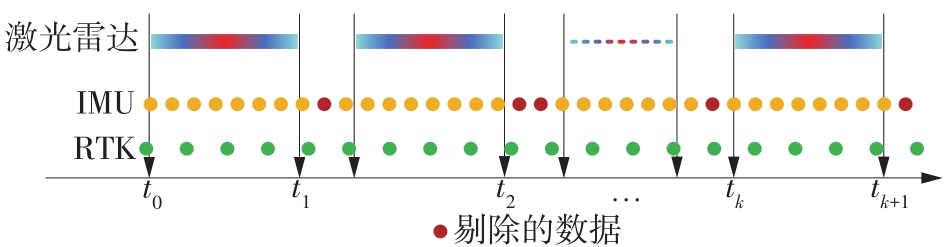
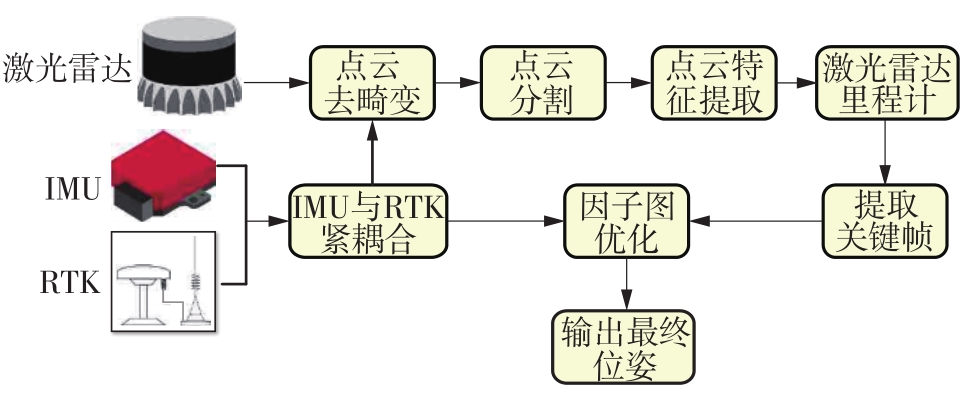
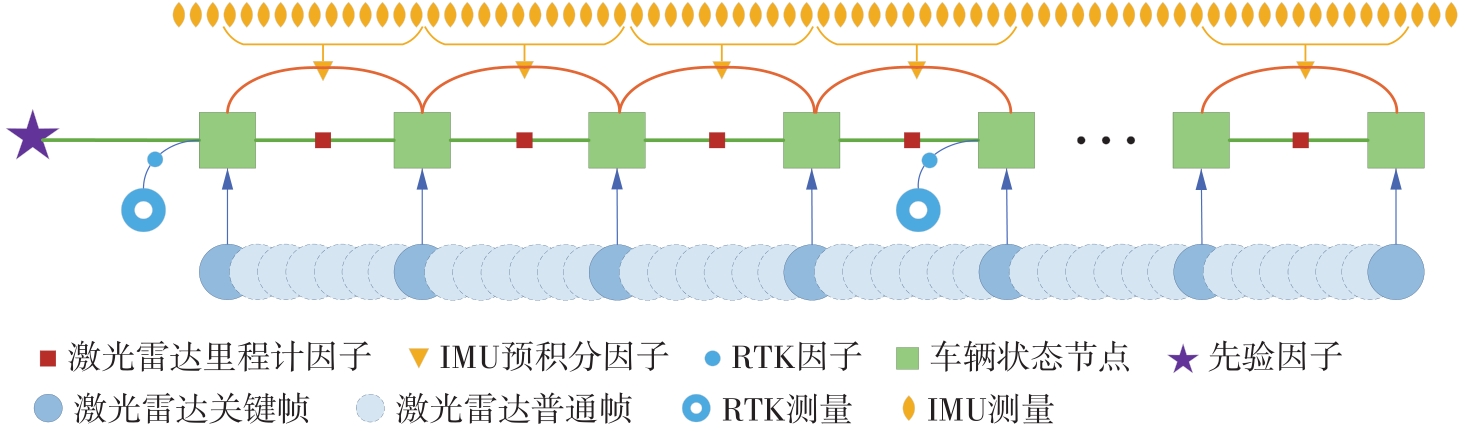
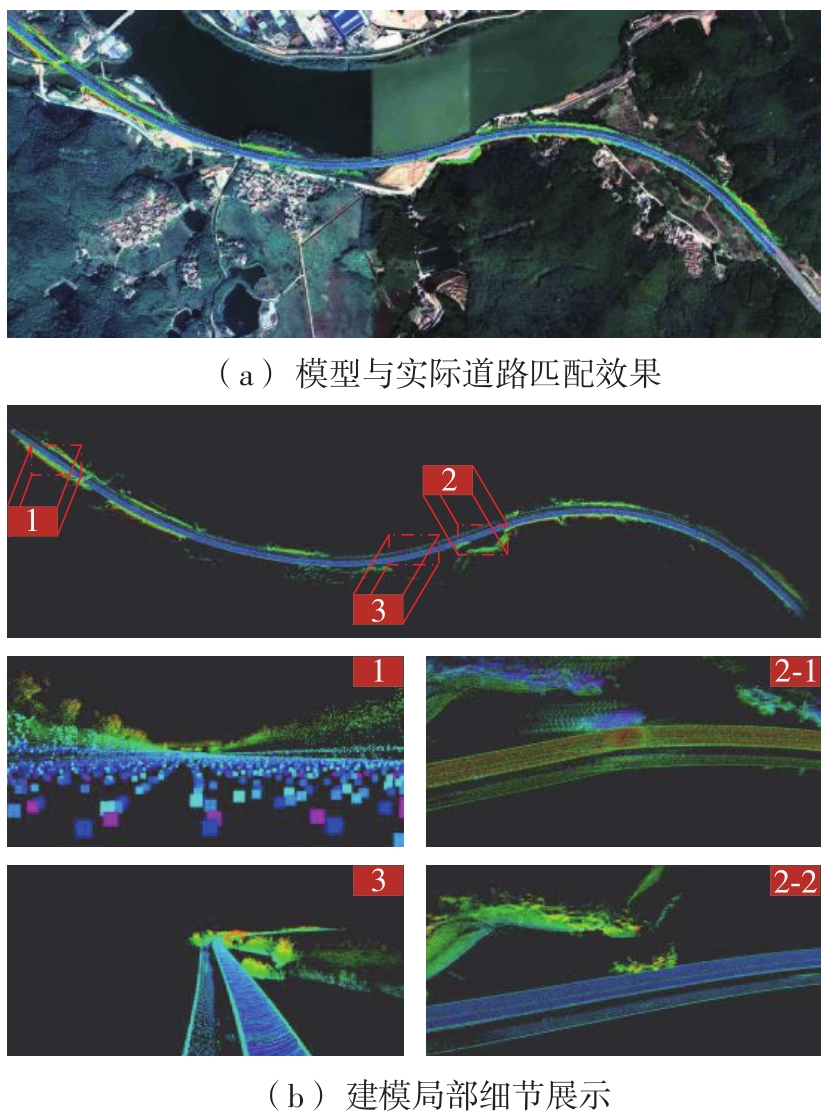
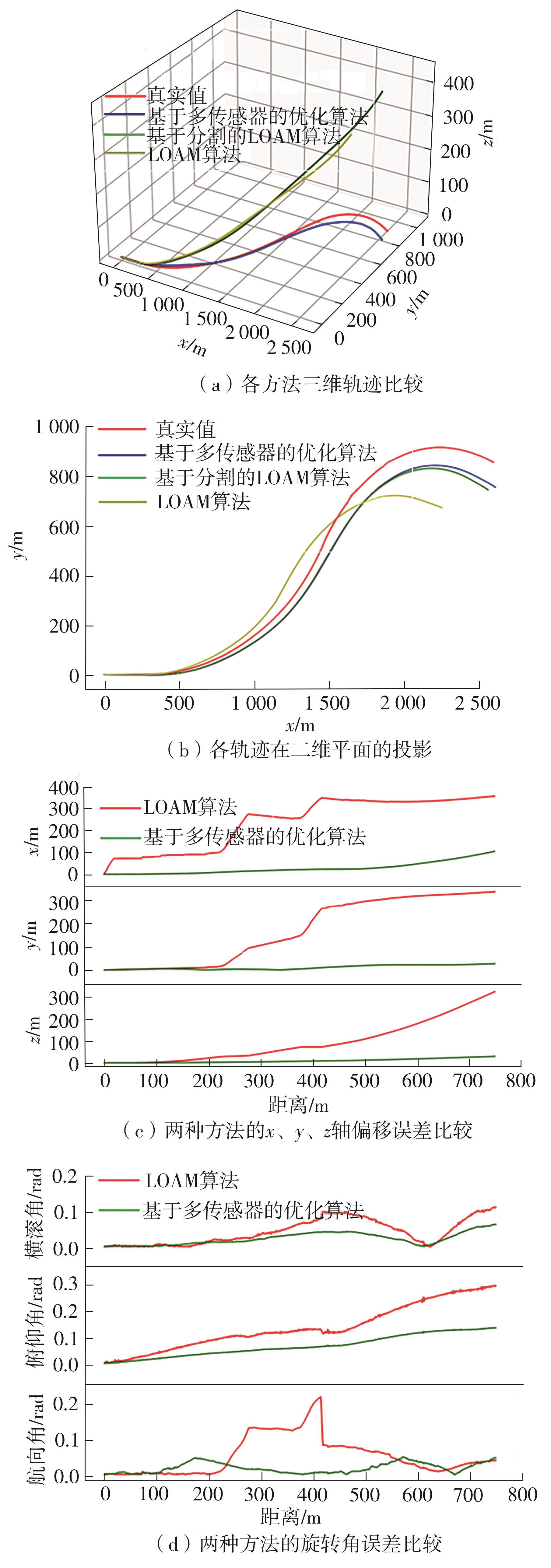
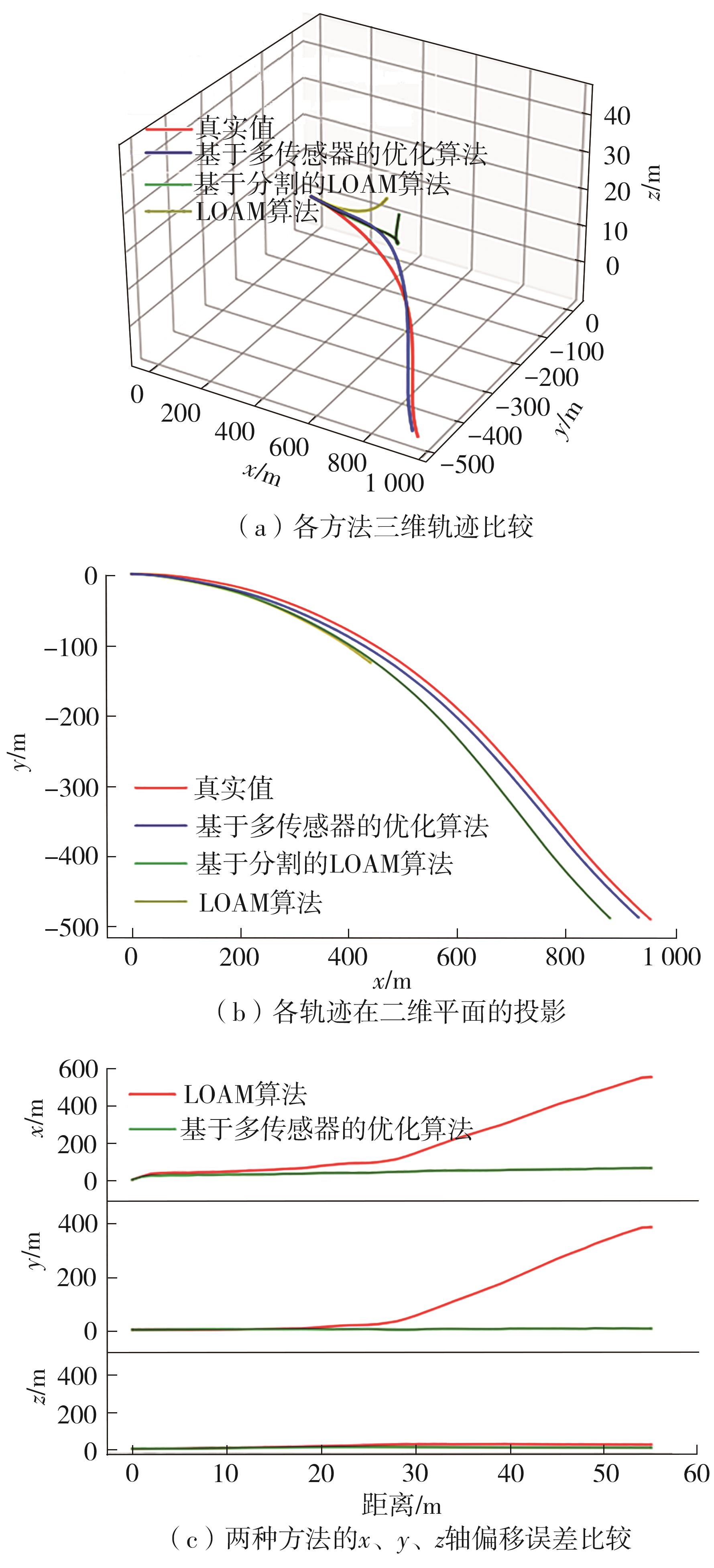
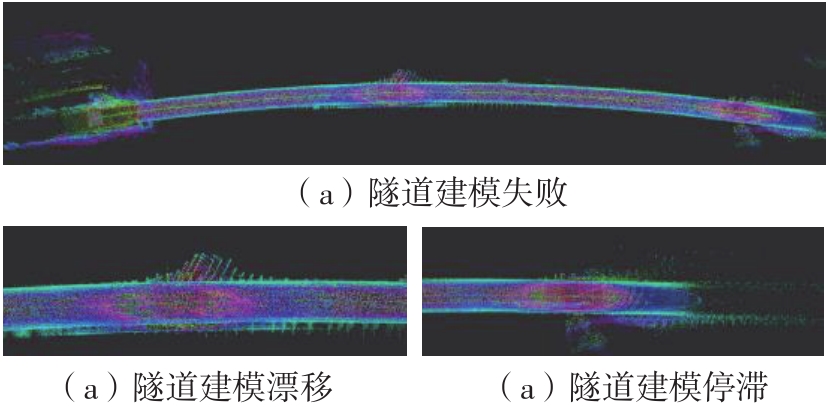
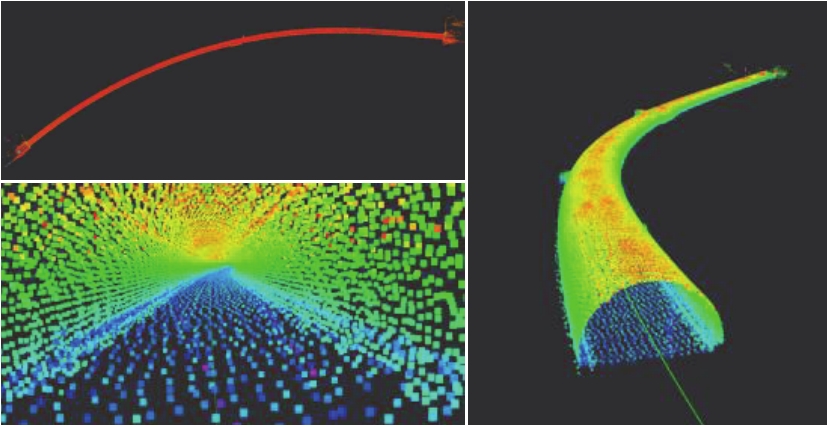
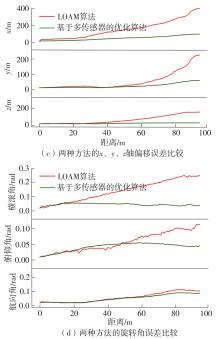
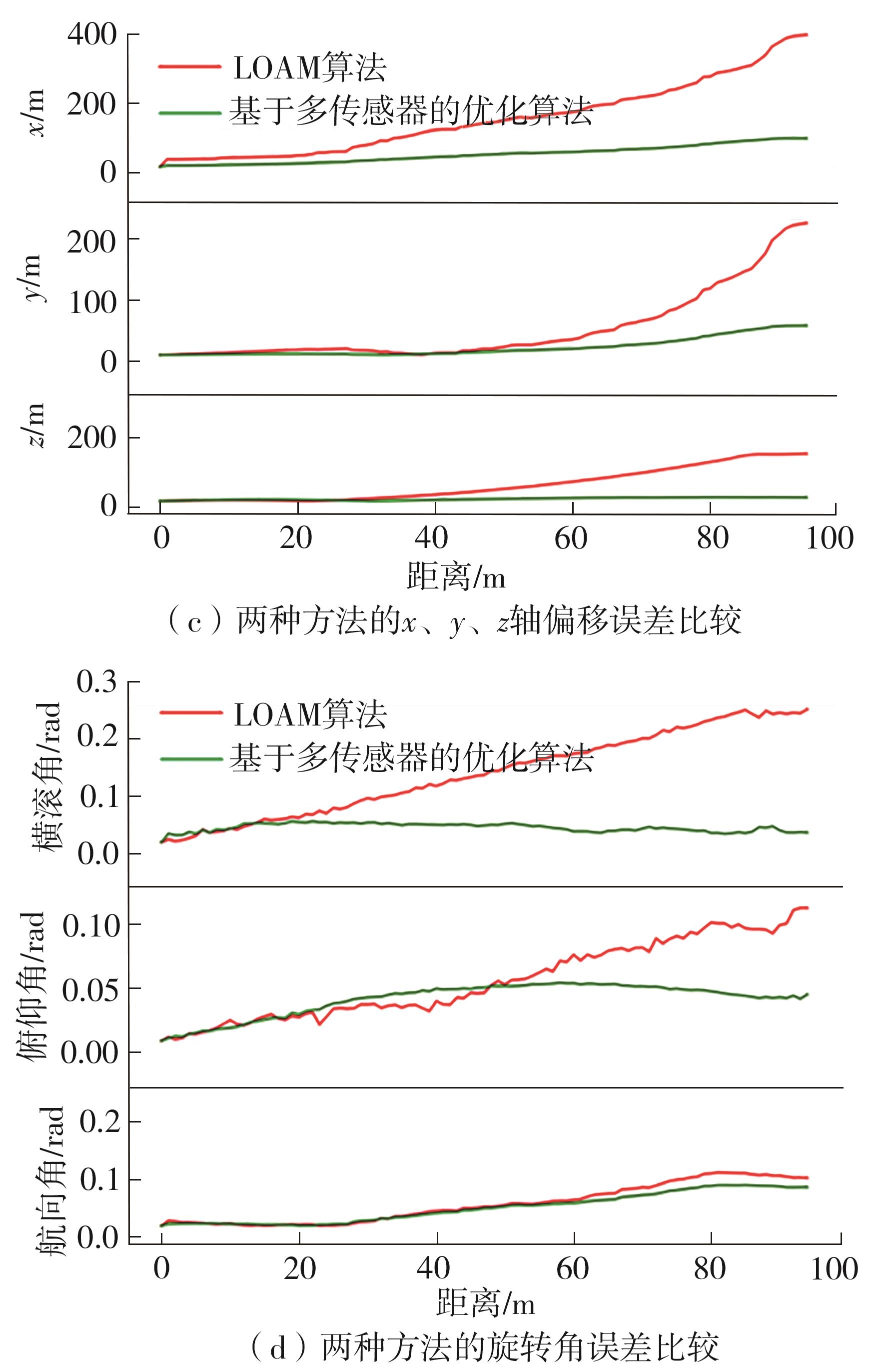
构建三维道路数字模型对智能车服务和道路管理具有重要意义。文中针对高速公路不同路段应用场景下车辆运行速度快、干扰噪声多、特征少和无回环检测辅助等一系列问题,提出一种以激光雷达信息为建模基础数据、激光雷达里程计与LOAM技术等多传感器融合的高速公路三维建模方法。首先,通过车载激光雷达获取道路场景的激光点云数据,使用激光雷达图像分割技术赋予每一个点有关构造物的标签,剔除道路上其他运动车辆的信息,减少建模噪声;其次,制定了一个精确的同步策略来对GNSS、IMU和激光雷达等传感器进行集成;在此基础上,结合惯性导航预积分结果、基于特征点云的位姿约束和RTK数据构建因子图,消除激光雷达里程计的累积误差,从而构建全局一致性的高速公路三维数字模型。为了保持姿态估计的有限数量,文中还引入了基于关键帧的滑动窗口优化策略。最后,分别采集高速公路场景中常见的3种路段(一般路段、桥梁和隧道路段)进行建模分析,结果表明,在具有挑战性的高速公路场景建模中,文中方法能够有效提高建模鲁棒性、精度以及模型有效性。
中图分类号: