华南理工大学学报(自然科学版) ›› 2022, Vol. 50 ›› Issue (10): 19-28.doi: 10.12141/j.issn.1000-565X.210703
所属专题: 2022年交通运输工程
基于联合仿真的超高速公路车辆制动避撞系统
何永明1,2 冯佳1,2 权聪1,2 陈世升1,2 曹剑1,2
- 1.东北林业大学 交通学院,黑龙江 哈尔滨 150040
2.哈尔滨超高速公路研究院,黑龙江 哈尔滨 150040
Braking Collision Avoidance System for Vehicles Driving on Superhighway Based on Co-simulation
HE Yongming1,2 FENG Jia1,2 QUAN Cong1,2 CHEN Shisheng1,2 CAO Jian1,2
- 1.School of Transportation,Northeast Forestry University,Harbin 150040,Heilongjiang,China
2.Research Institute of Superhighway in Harbin,Harbin 150040,Heilongjiang,China
摘要:
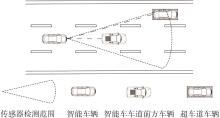
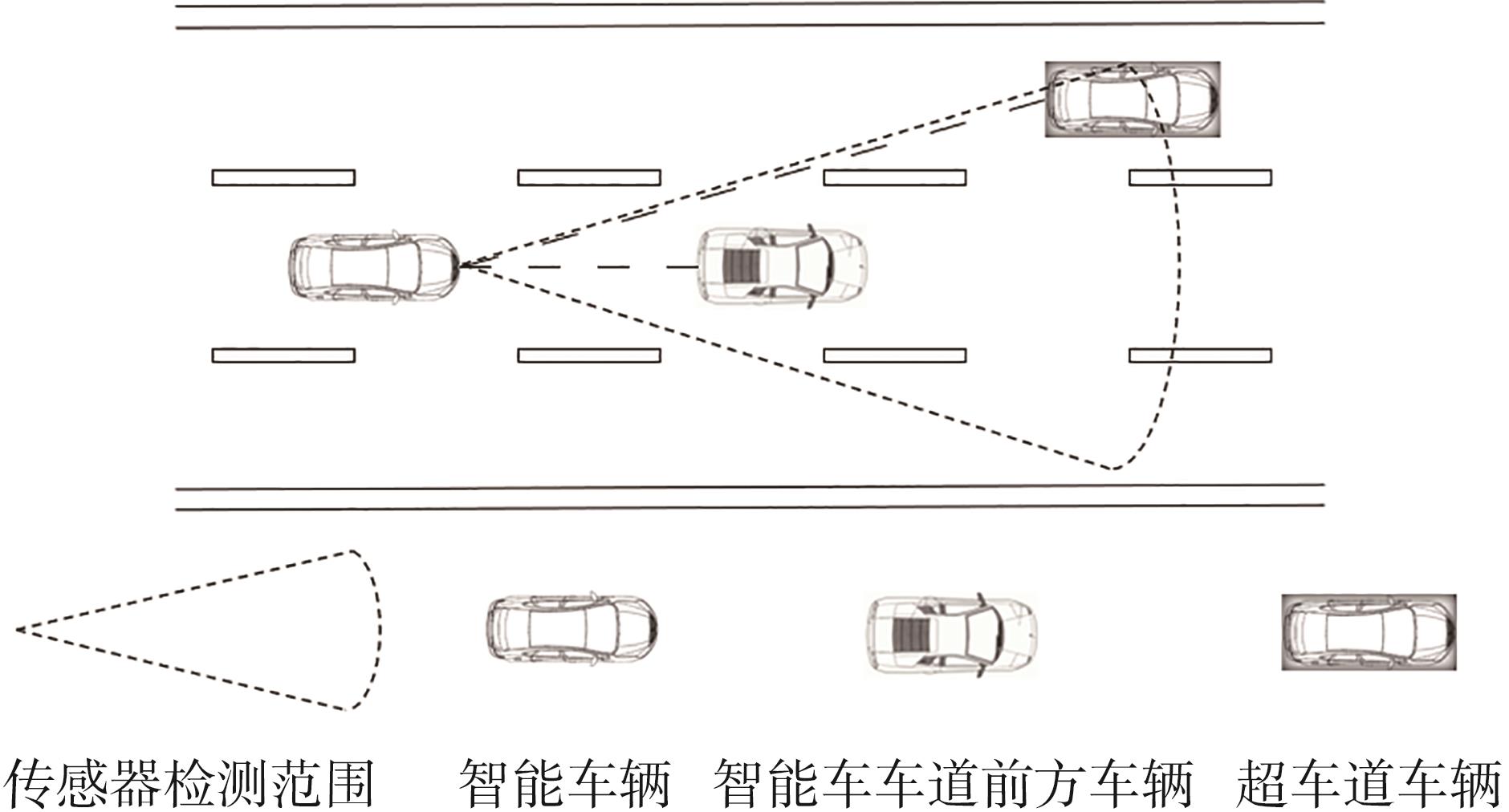
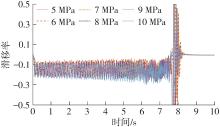
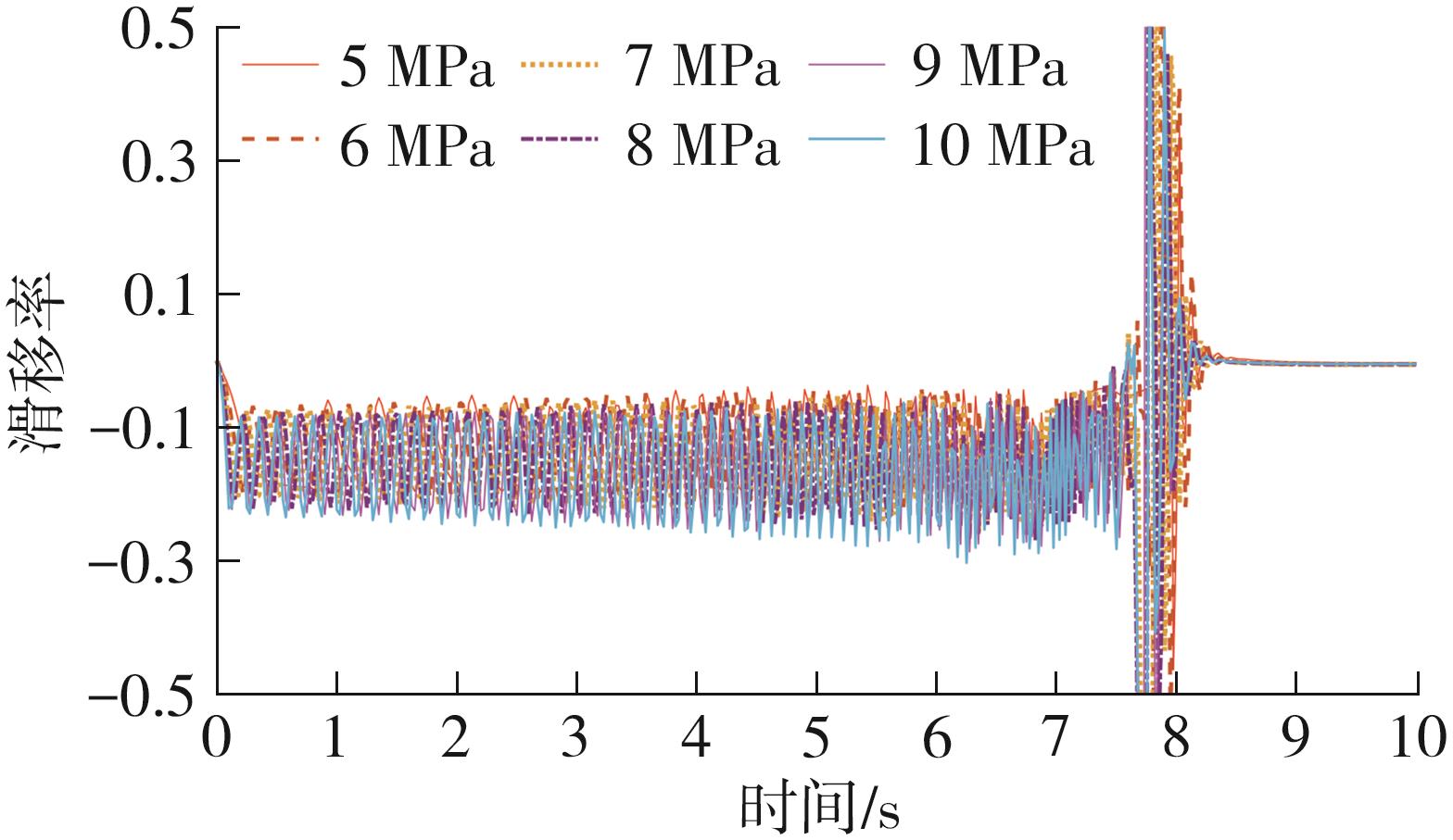
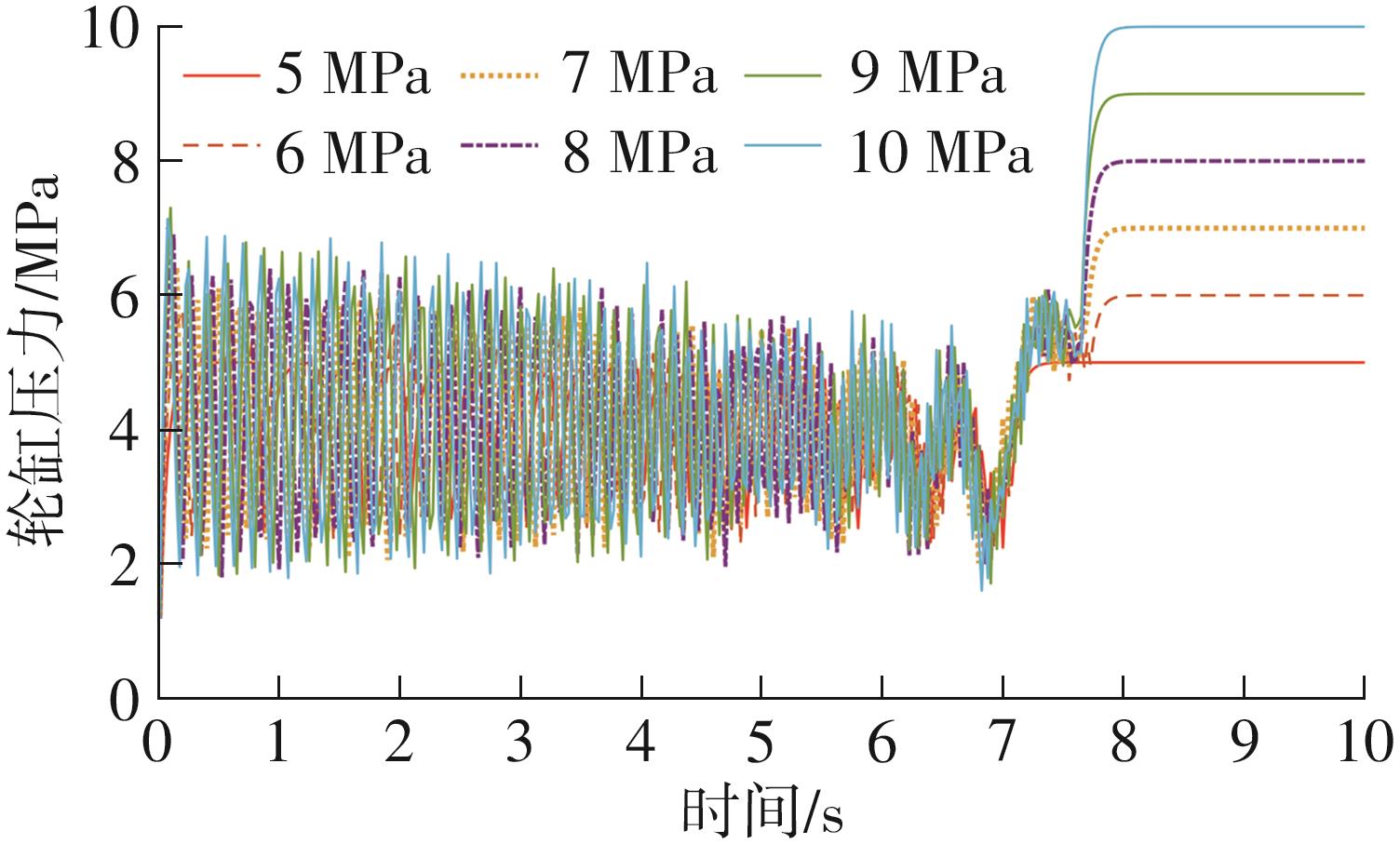
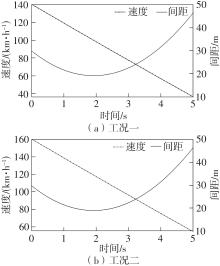
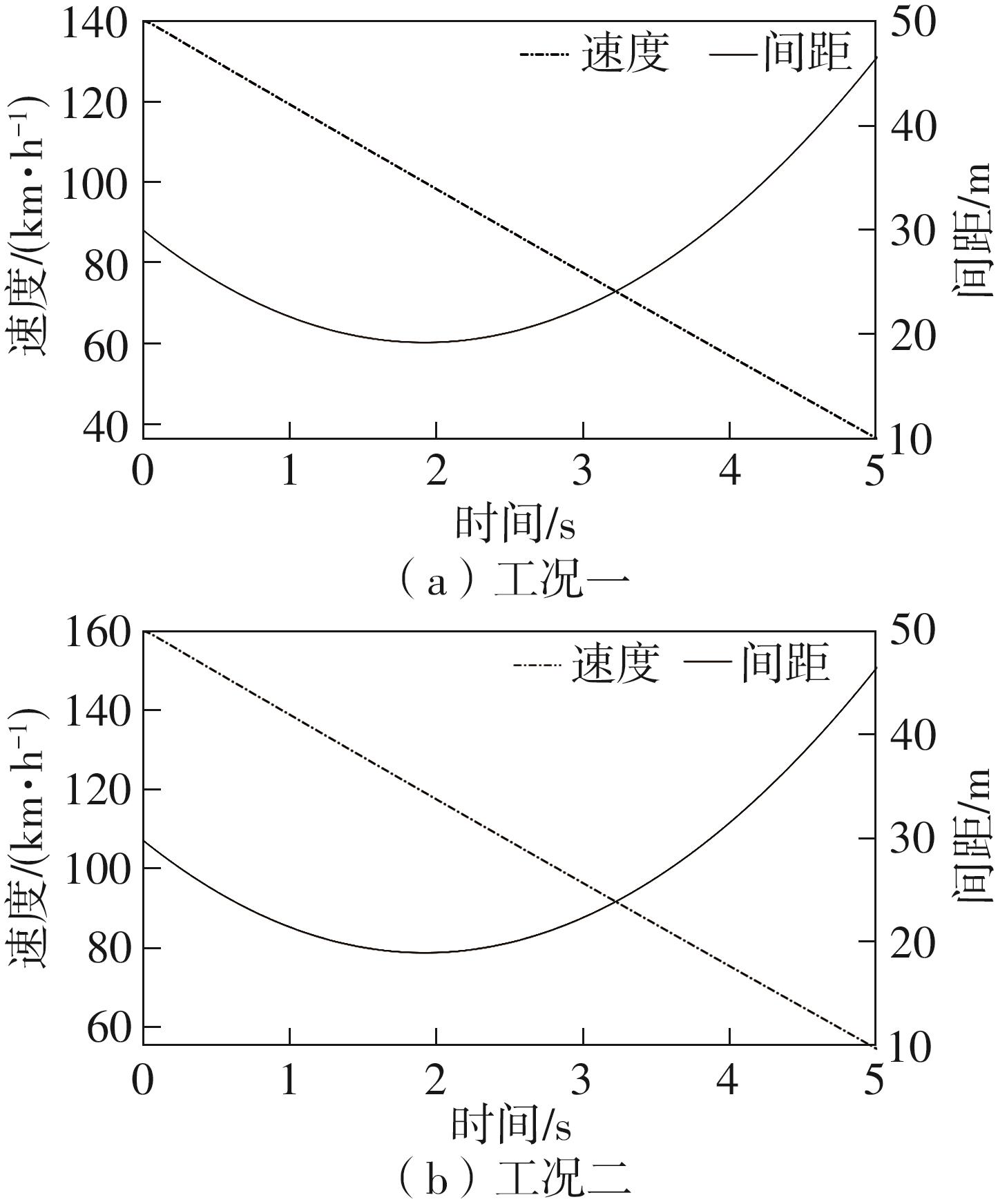
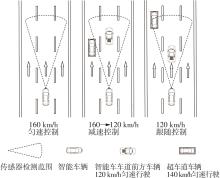
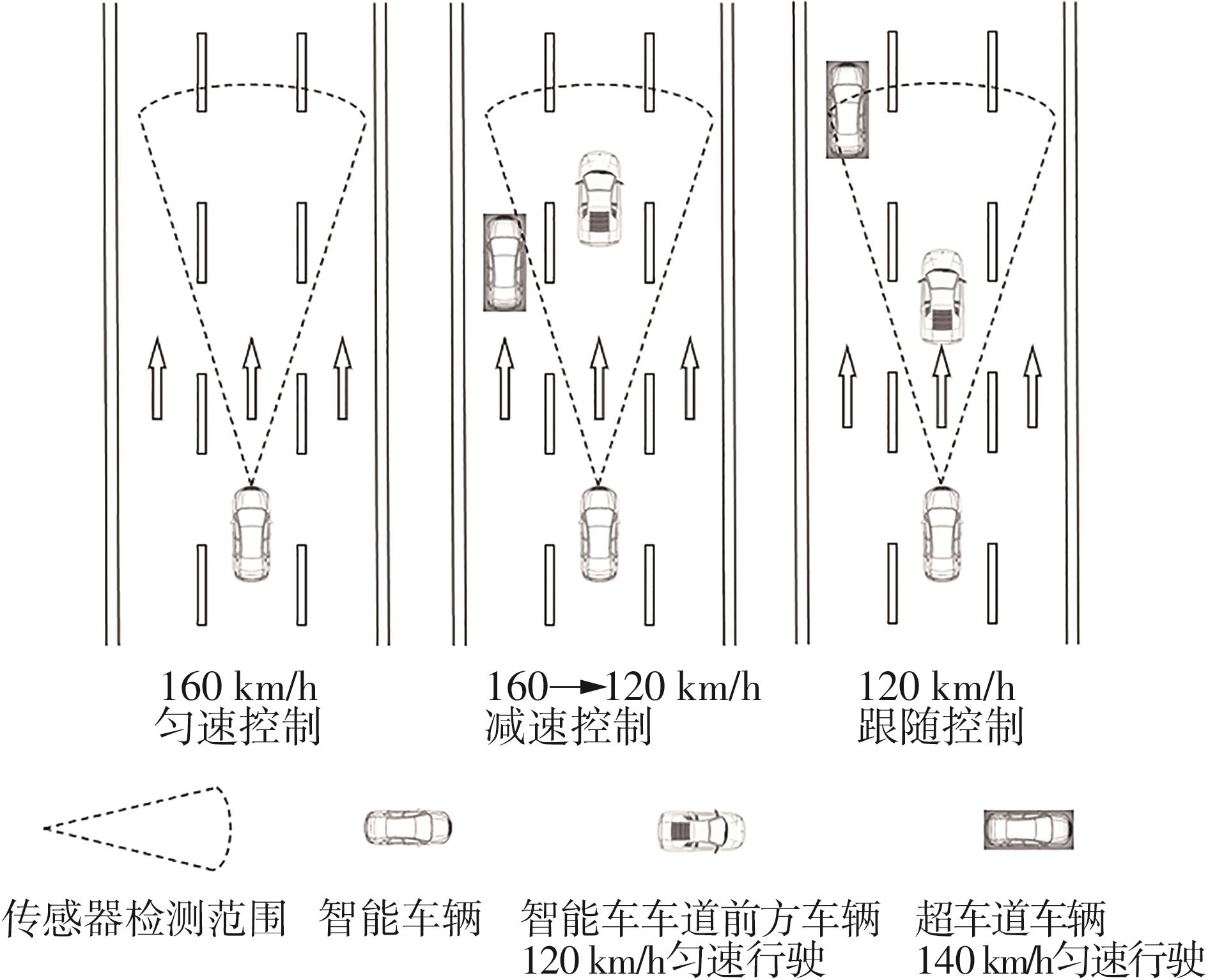
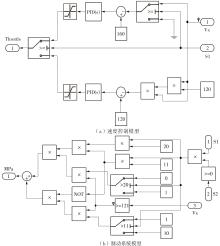
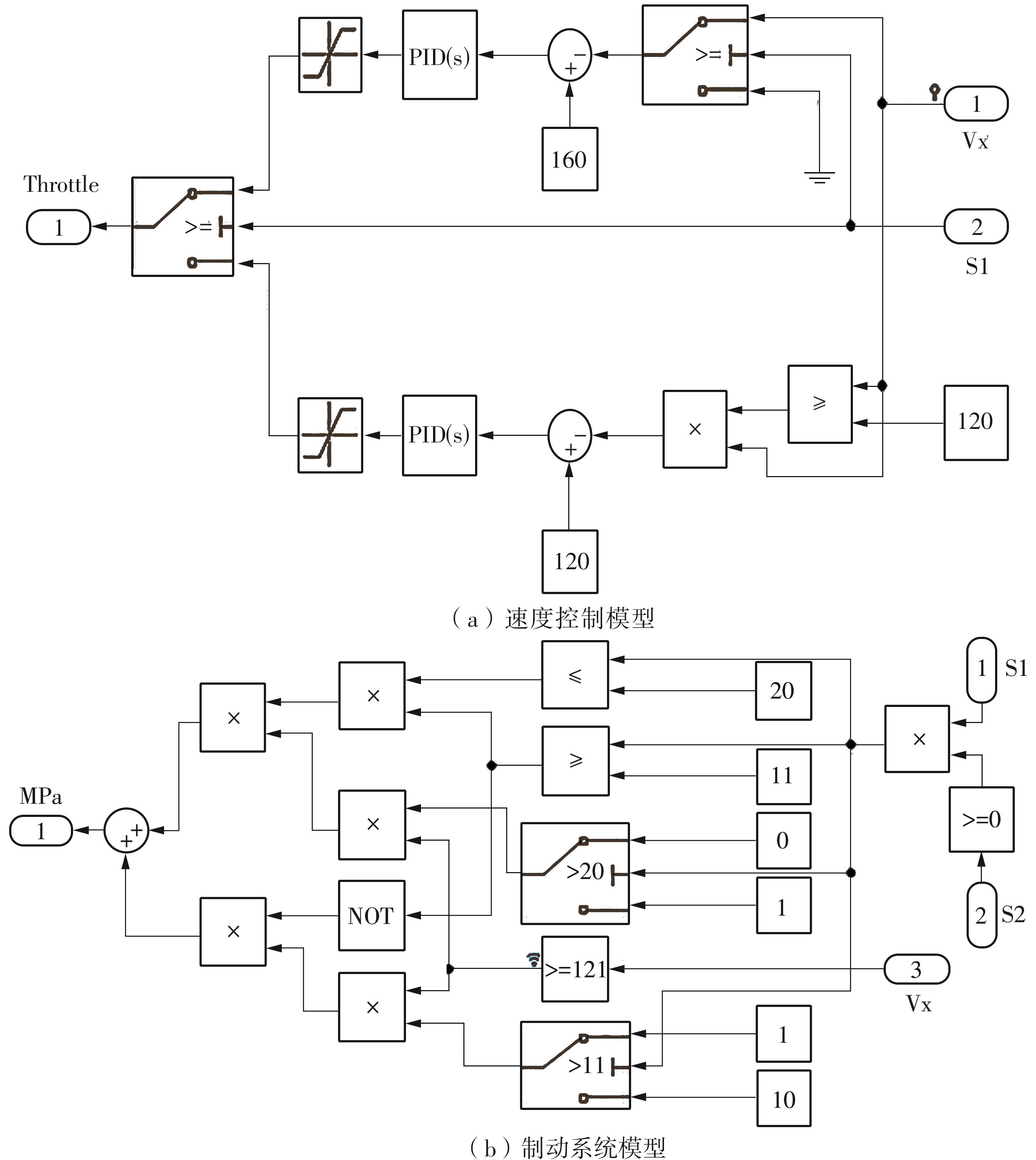
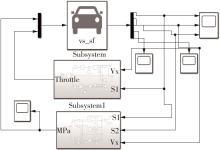
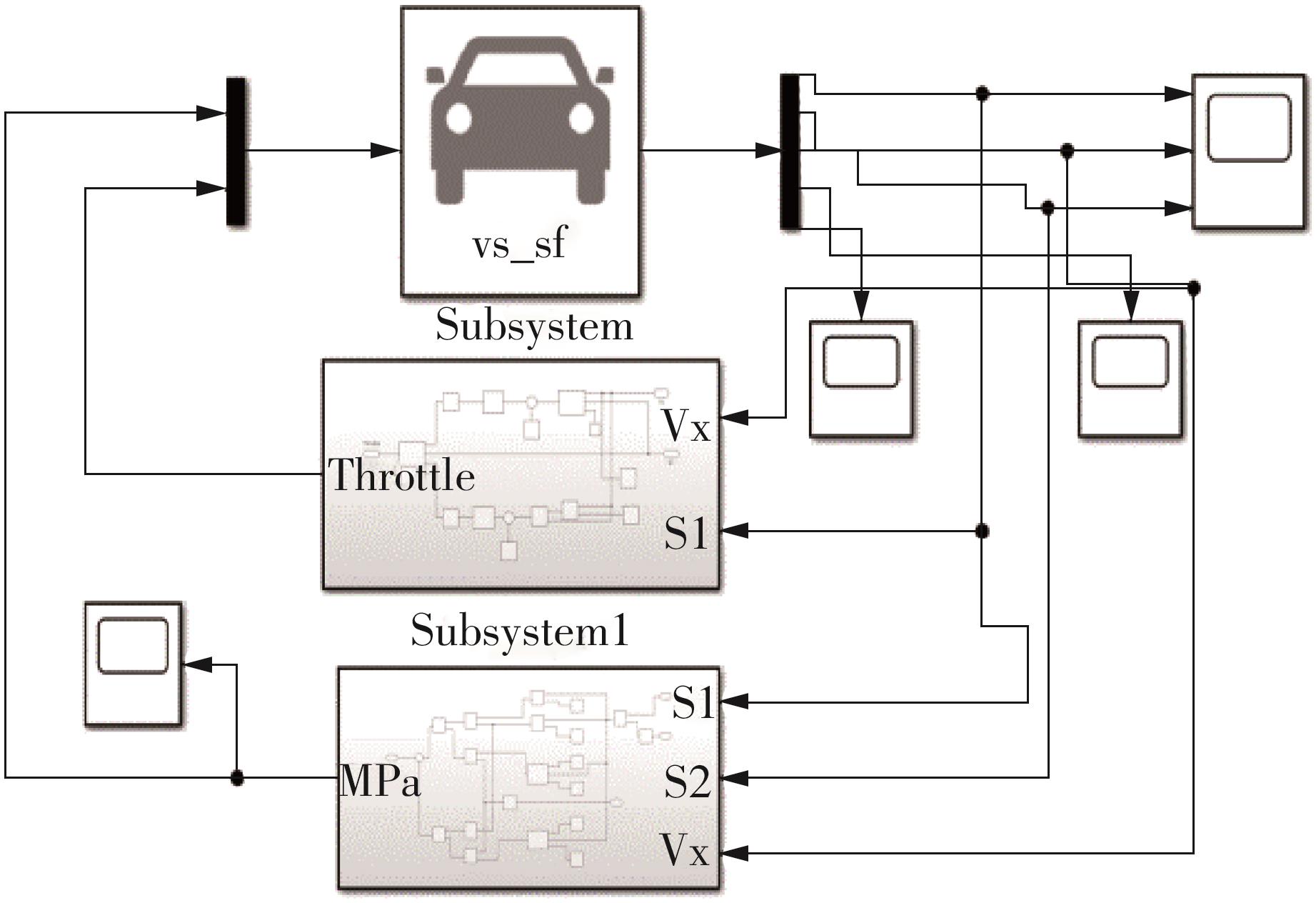
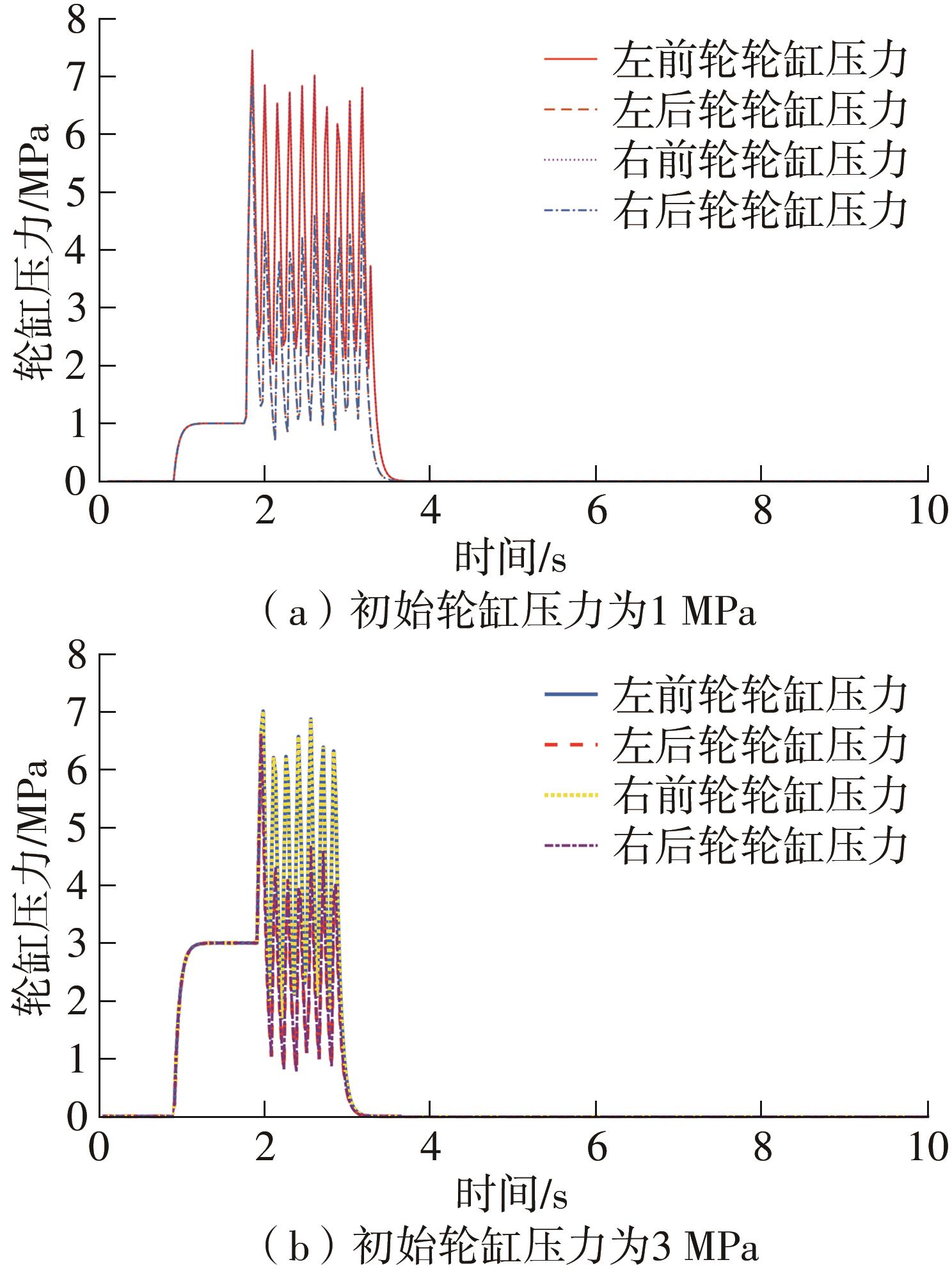
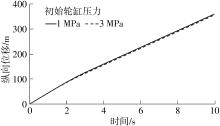
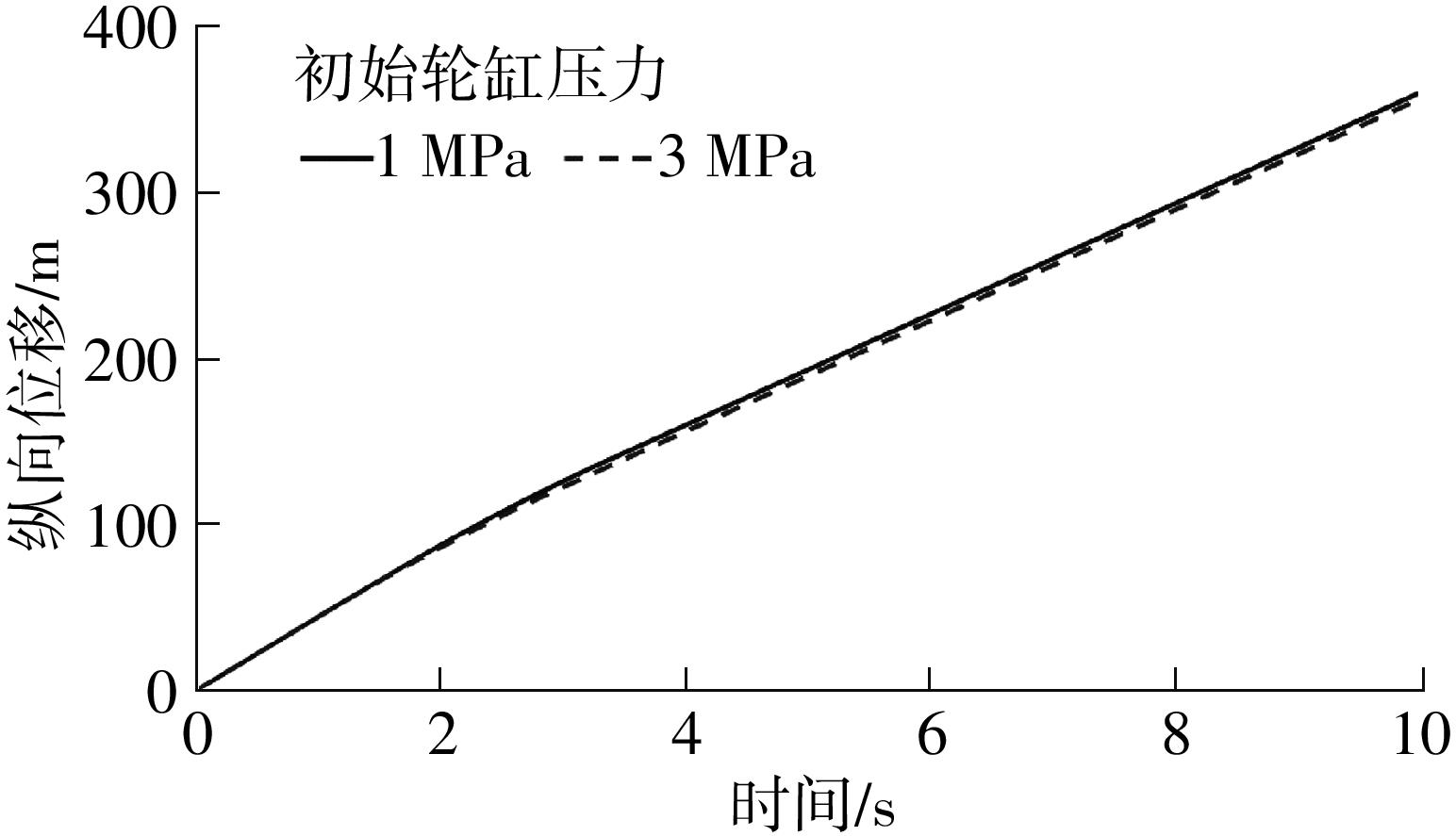
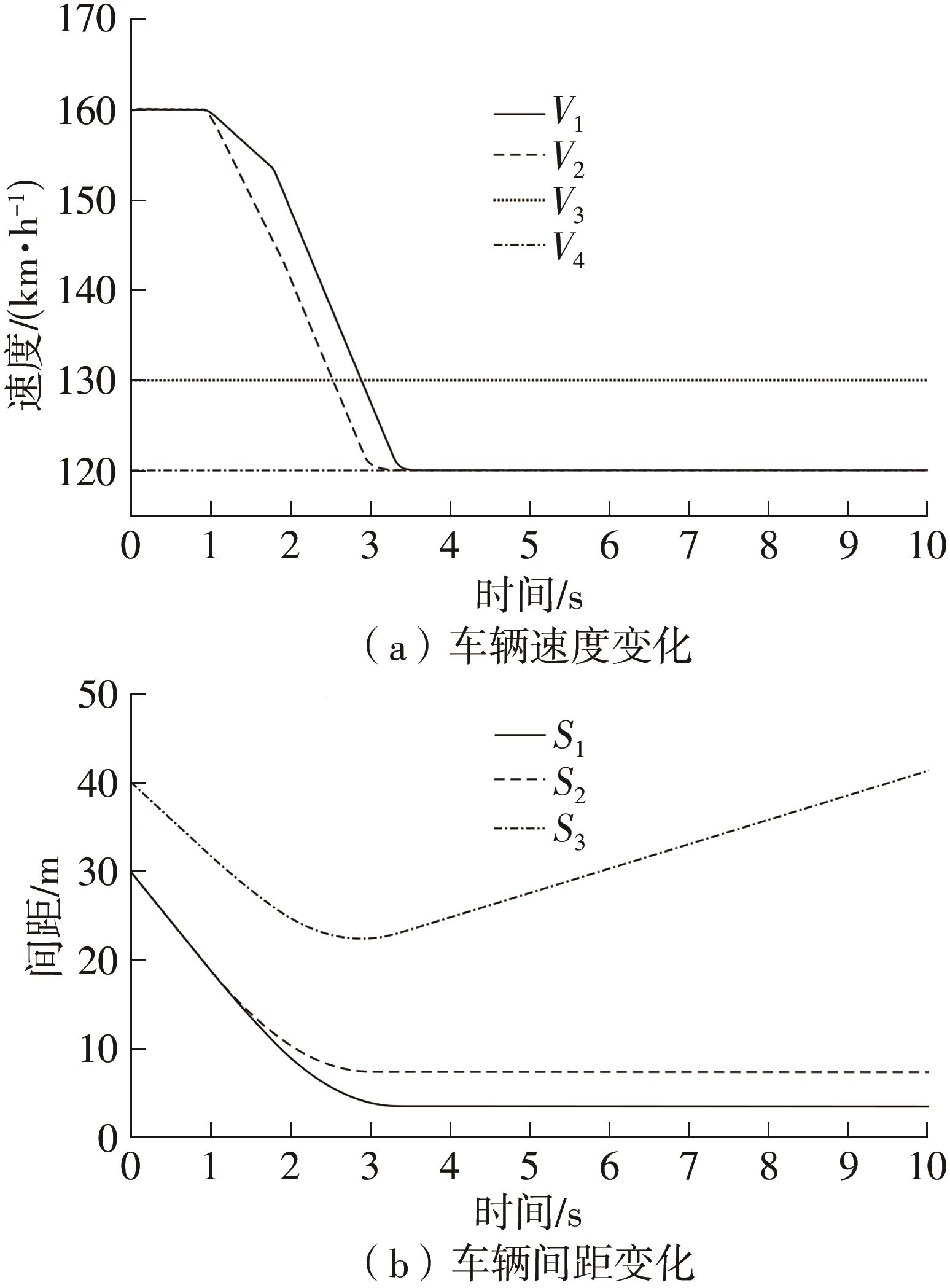
为解决行驶在超高速公路上的高速智能车与前方低速车辆碰撞的安全问题,用联合仿真的方法研究了车辆制动避撞系统。通过CarSim软件建立车辆动力学模型,并设置前方车辆参数、道路参数和传感器参数,在MATLAB/Simulink中建立基于车间距和车速的控制模型,通过CarSim软件的输入与输出参数接口模块建立信号连接。当前车车速为100、120和140 km/h,智能车车速为140、160和180 km/h时,控制模型通过传感器采集到的实时距离与速度对智能车发出制动减速信号,建立超高速公路行驶车辆紧急制动避撞策略。研究结果表明:当道路附着系数为0.60,超高速公路汽车行驶在平坦的直线路段上进行制动时,最佳轮缸压力为7 MPa,此时,车辆速度为160 km/h时汽车的制动距离为170.3 m,前车以速度100、120和140 km/h匀速行驶,智能车车速分别以140、160和180 km/h制动到与前车车速一样时,所需要的相对距离分别为10.8、10.7和10.5 m。设置路面附着系数为0.60,前车车速分别为100、120和140 km/h,初始轮缸压力为1 MPa,智能车制动减速到与前车车速一样时,智能车前悬距前车后悬距离分别为3.1、3.5和3.8 m,其他条件不变,当初始轮缸压力为3 MPa,智能车制动到与前车车速相同时,智能车前悬距前车后悬距离分别为7.0、7.3和7.7 m。通过搭建的CarSim/Simulink汽车紧急制动避撞控制联合仿真平台,验证了超高速公路制动避撞模型的有效性和准确性,可以提高超高速公路行车的安全性。
中图分类号: