| 1 |
余海东,李琳,赵勇,等 .复杂地质条件下TBM撑靴液压缸导向铜套微动损伤分析[J].机械工程学报,2018,54(1):74-81.
|
|
YU Haidong, LI Lin, ZHAO Yong,et al .Fretting damage of copper sleeve gasket in gripper cylinder of TBM excavating in complex geological structures[J].Journal of Mechanical Engineering,2018,54(1):74-81.
|
| 2 |
夏毅敏,钱聪,李正光,等 .隧道掘进机支撑推进系统振动特性[J].浙江大学学报(工学版),2018,52(2):233-239,306.
|
|
XIA Yi-min, QIAN Cong, LI Zheng-guang,et al .Vibration characteristics of TBM supporting-thrusting system[J].Journal of Zhejiang University (Engineering Science),2018,52(2):233-239,306.
|
| 3 |
陈玉羲,龚国芳,石卓,等 .基于施工数据的TBM支撑推进协调控制系统[J].浙江大学学报(工学版),2019,53(2):250-257.
|
|
CHEN Yu-xi, GONG Guo-fang, SHI Zhuo,et al .Coordinated control of gripper and thrust system for TBM based on construction data[J].Journal of Zhejiang University (Engineering Science),2019,53(2):250-257.
|
| 4 |
TAO J, LEI J, LIU C,et al .Nonlinear static and dynamic stiffness characteristics of support hydraulic system of TBM[J].Chinese Journal of Mechanical Engineering,2019,32(1):101.
|
| 5 |
XIA Y, GUO B, CONG G,et al .Numerical simulation of rock fragmentation induced by a single TBM disc cutter close to a side free surface[J].International Journal of Rock Mechanics & Mining Sciences,2017,91:40-48.
|
| 6 |
霍军周,吴瀚洋,朱冬,等 .TBM机电耦合建模与同步控制策略对比分析[J].机械工程学报,2018,54(1):120-126.
|
|
HUO Junzhou, WU Hanyang, ZHU Dong,et al .TBM electromechanical coupling modeling and comparative analysis of synchronous drive control strategy[J].Journal of Mechanical Engineering,2018,54(1):120-126.
|
| 7 |
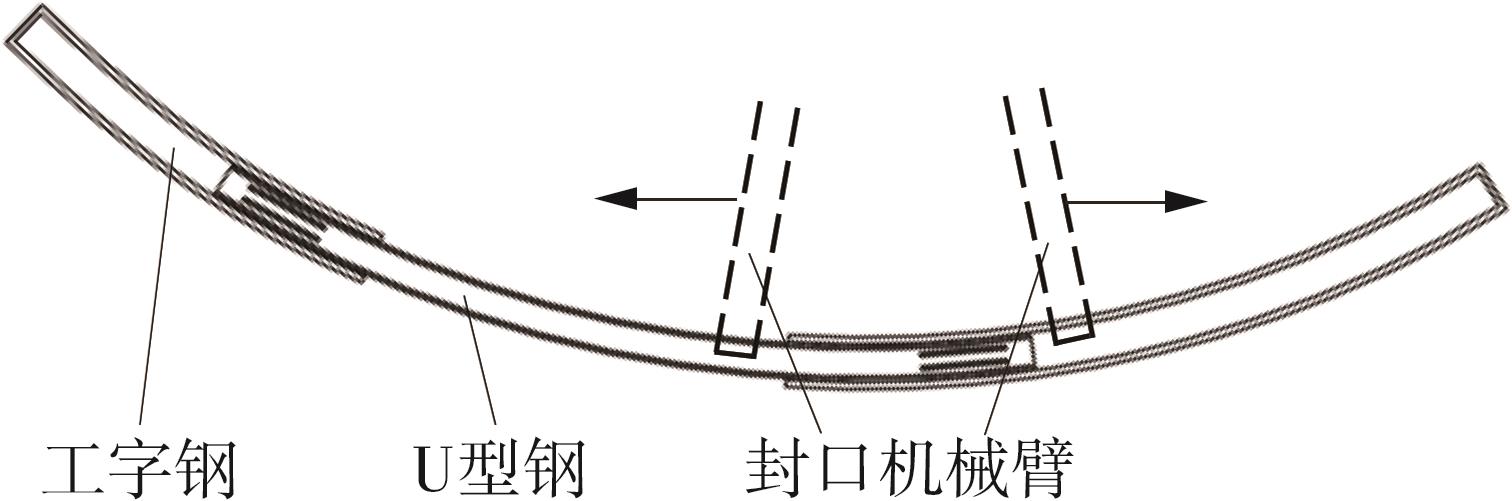
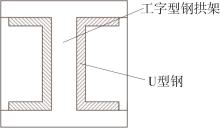
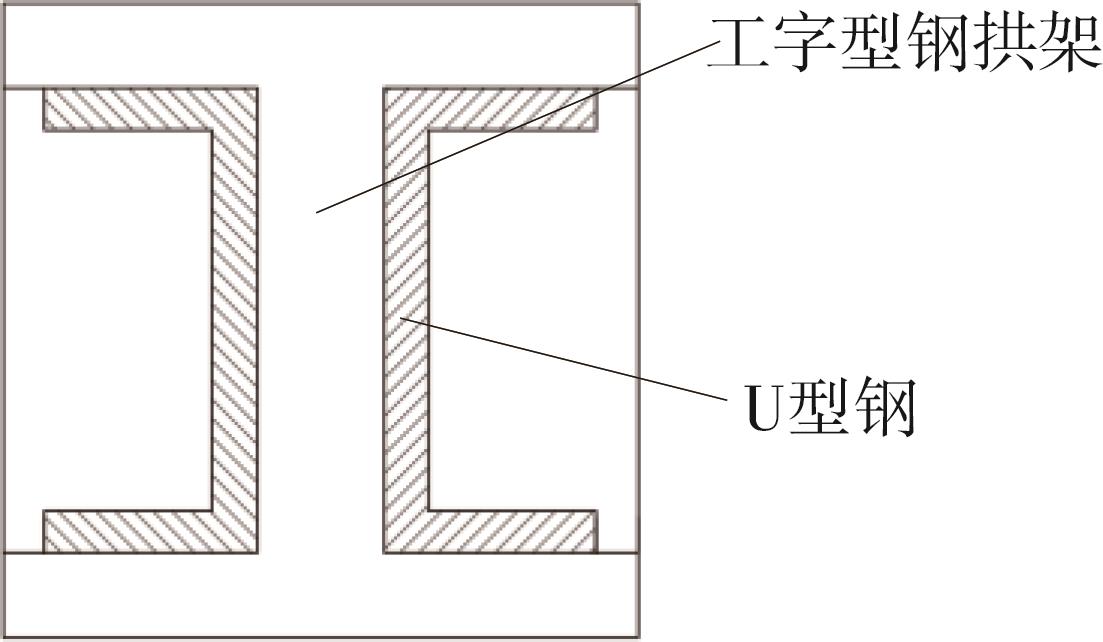
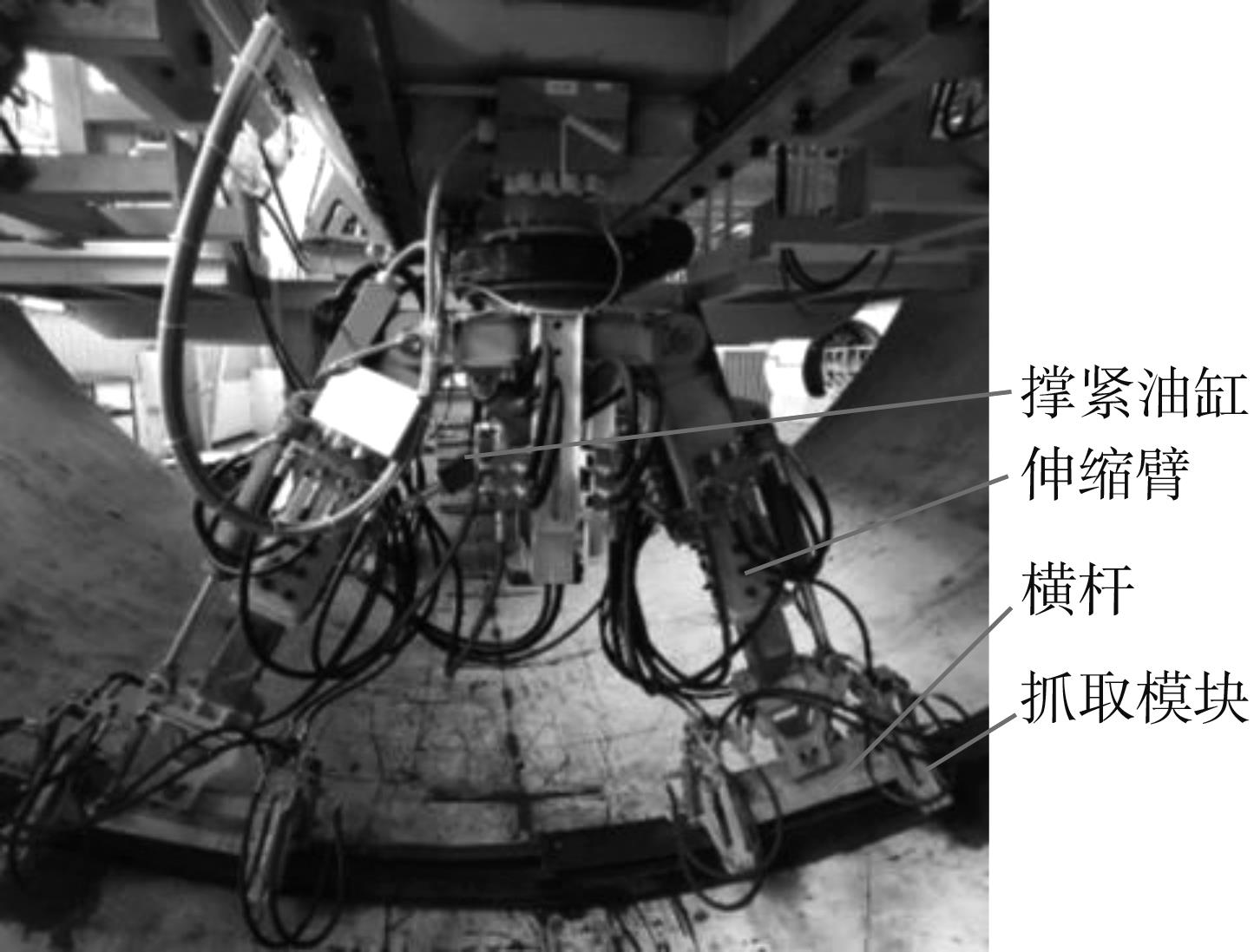
何源福,夏毅敏,龙斌,等 .TBM钢拱架拼接机械手抓取对接机构[J].浙江大学学报(工学版),2020,54(11):2204-2213.
|
|
HE Yuan-fu, XIA Yi-min, LONG Bin,et al .Grasping docking mechanism of TBM steel arch splicing robot[J].Journal of Zhejiang University (Engineering Science),2020,54(11):2204-2213.
|
| 8 |
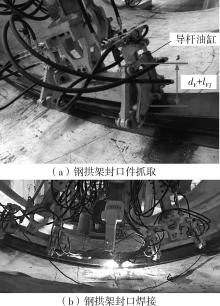
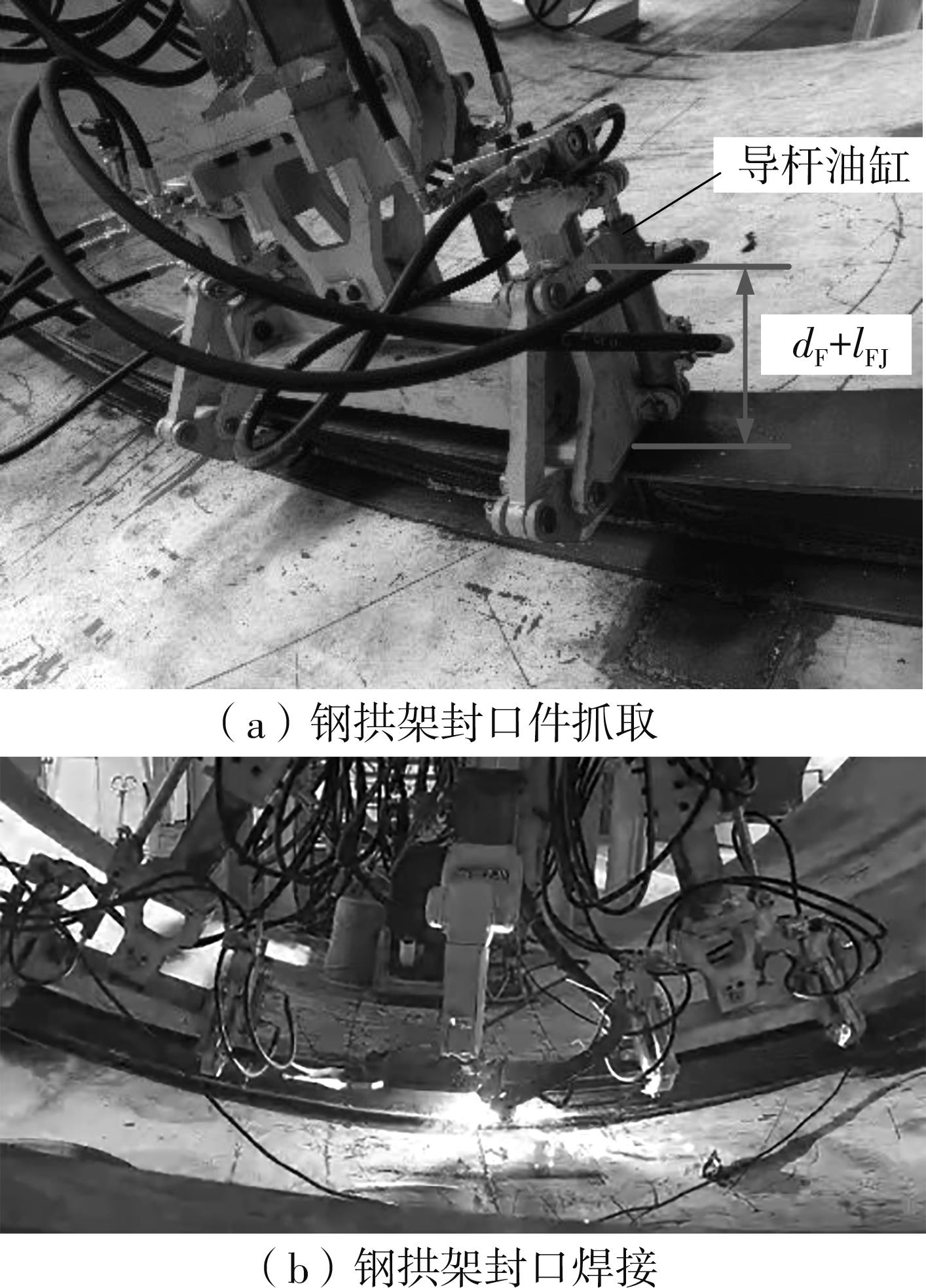
何源福,龙斌,邓朝辉,等 .一种TBM钢拱架自动封口安装作业装置及作业方法:113441858A[P].2021-09-28.
|
| 9 |
WANG M, CHEN Q, LIU H,et al .Evaluation of the kinematic performance of a 3-RRS parallel mechanism[J].Robotica,2021,39(4):606-617.
|
| 10 |
费宇,谢超,李华,等 .推杆针轮活齿齿形方程的简化建模与传动角分析[J].工程科学与技术,2019,51(1):241-247.
|
|
FEI Yu, XIE Chao, LI Hua,et al .Tooth profile simplified modeling and transmission angle analysis of push-rods oscillatory transmission with needle gears[J].Advanced Engineering Sciences,2019,51(1):241-247.
|
| 11 |
刘辛军,王立平,吴泽启,等 .基于力传递性能的平面并联机器人的优化设计[J].清华大学学报(自然科学版),2008,48(11):1927-1930.
|
|
LIU Xinjun, WANG Liping, WU Zeqi,et al .Optimum design of a planar parallel robot based on force transmi-ssibility[J].Journal of Tsinghua University (Science and Technology),2008,48(11):1927-1930.
|
| 12 |
WANG J, LIU X, WU C .Optimal design of a new spatial 3-DOF parallel robot with respect to a frame-free index[J].Science in China Series E:Technological Sciences,2009,52(4):986-999.
|
| 13 |
LIANG X, TAKEDA Y .Transmission index of a class of parallel manipulators with 3-RS(SR) primary structures based on pressure angle and equivalent mechanism with 2-SS chains replacing RS chain[J].Mechanism and Machine Theory,2019,139:359-378.
|
| 14 |
马广英,王光明,刘润晨,等 .串并混联四足机器人腿机构的设计及运动学分析[J].华南理工大学学报(自然科学版),2021,49(1):103-112.
|
|
MA Guangying, WANG Guangming, LIU Runchen,et al .Structure design and kinematics analysis on the serial-parallel leg of quadruped robots[J].Journal of South China University of Technology (Natural Science Edition),2021,49(1):103-112.
|
| 15 |
陈炳发,丁旺生,丁力平,等 .新型空间5自由度并联机构的奇异位形分析与规避[J].华南理工大学学报(自然科学版),2014,42(11):7-13.
|
|
CHEN Bing-fa, DING Wang-sheng, DING Li-ping,et al .Singularity configuration analysis and avoidance of a new type of spatial 5-DOF parallel mechanism[J].Journal of South China University of Technology (Natural Science Edition),2014,42(11):7-13.
|
| 16 |
王国彪,刘辛军 .初论现代数学在机构学研究中的作用与影响[J].机械工程学报,2013,49(3):1-9.
|
|
WANG Guobiao, LIU Xinjun .Role and influence of modern mathematics in mechanisms[J].China Mechanical Engineering,2013,49(3):1-9.
|
| 17 |
CHE L, CHEN G, JIANG H,et al .Dimensional synthesis for a Rec4 parallel mechanism with maximum transmission workspace[J].Mechanism and Machine Theory,2020,153:104008/1-16.
|
| 18 |
刘海涛,熊坤,贾昕胤,等 .3自由度冗余驱动下肢康复并联机构的运动学优化设计[J].天津大学学报(自然科学与工程技术版),2018,51(4):357-366.
|
|
LIU Haitao, XIONG Kun, JIA Xinyin,et al .Kinematic optimization of a redundantly actuated 3-DOF pa-rallel mechanism for lower-limb rehabilitation[J].Journal of Tianjin University (Science and Technology),2018,51(4):357-366.
|
| 19 |
MENG Q, XIE F, LIU X,et al .An evaluation approach for motion-force interaction performance of parallel manipulators with closed-loop passive limbs[J].Mechanism and Machine Theory,2020,149:103844/1-20.
|
| 20 |
XIE F, LIU X .Design and development of a high-speed and high-rotation robot with four identical arms and a single platform[J].Journal of Mechanisms and Robotics:Transactions of the ASME,2015,7(4):041015.
|
| 21 |
WU G, BAI S, HJORNET P .Architecture optimization of a parallel Schönflies-motion robot for pick-and-place applications in a predefined workspace[J].Mechanism and Machine Theory,2016,106:148-165.
|
| 22 |
WU G, CARO S, WANG J .Design and transmission analysis of an asymmetrical spherical parallel manipulator[J].Mechanism and Machine Theory,2015,94:119-131.
|