| 1 |
GIRSHICK R, DONAHUE J, DARRELL T,et al .Rich feature hierarchies for accurate object detection and semantic segmentation[C]∥ Proceedings of 2014 IEEE Conference on Computer Vision and Pattern Recognition(CVPR).Columbus:IEEE,2014:580-587.
|
| 2 |
GIRSHICK R, DONAHUE J, DARRELL T,et al .Region-based convolutional networks for accurate object detection and segmentation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,38(1):142-158.
|
| 3 |
GIRSHICK R .Fast R-CNN[C]∥ Proceedings of 2015 IEEE International Conference on Computer Vision (ICCV).Santiago:IEEE,2015:1440-1448.
|
| 4 |
HE K M, ZHANG X Y, REN S Q,et al .Spatial pyramid pooling in deep convolutional networks for visual re-cognition[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(9):1904-1916.
|
| 5 |
REN S Q, HE K M, GIRSHICK R,et al .Faster R-CNN:towards real-time object detection with region proposal networks[J].Advances in Neural Information Processing Systems,2017,39(6):1137-1149.
|
| 6 |
REDMON J, DIVVALA S, GIRSHICK R,et al .You only look once:unified,real-time object detection[C]∥ Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas:IEEE,2016:779-788.
|
| 7 |
LIU W, ANGUELOV D, ERHAN D,et al .Ssd:single shot multibox detector[C]∥ Proceedings of 2016 European Conference on Computer Vision (ECCV).Amsterdam:Springer,2016:21-37.
|
| 8 |
SONG Y K, HONG S H, HU C T,et al .MEB-YOLO:an efficient vehicle detection method in complex traffic road scenes[J].Computers Materials & Continua,2023,75(3):5761-5784.
|
| 9 |
CAO G M, XIE X M, YANG W Z,et al .Feature-fused SSD:fast detection for small objects[C]∥ Proceedings of Ninth International Conference on Graphic and Image Processing (ICGIP 2017).Qingdao:SPIE,2018:381-388.
|
| 10 |
LIN T Y, GOYAL P, GIRSHICK R,et al .Focal loss for dense object detection[C]∥ Proceedings of 2017 IEEE International Conference on Computer Vision (ICCV).Venice:IEEE,2017:2980-2988.
|
| 11 |
ZHAO G C, PANG J, ZHANG H,et al .Anchor-free network for multi-class object detection in remote sensing images[C]∥ Proceedings of 2020 39th Chinese Control Conference (CCC).Shenyang:IEEE,2020:7510-7515.
|
| 12 |
LAW H, DENG J .CornerNet:detecting objects as paired keypoints[C]∥ Proceedings of 2018 European Conference on Computer Vision (ECCV).Munich:Springer,2018:734-750.
|
| 13 |
CARION N, MASSA F, SYNNAEVE G,et al .End-to-end object detection with transformers[C]∥ Proceedings of 2020 European Conference on Computer Vision (ECCV).Glasgow:Springer,2020:213-229.
|
| 14 |
ZHOU X Y, WANG D Q, KRÄHENBÜHL P .Objects as points[J].arXiv preprint arXiv:,2019.
|
| 15 |
HOWARD A, SANDLER M, CHU G,et al .Searching for mobilenetv3[C]∥ Proceedings of 2019 IEEE International Conference on Computer Vision (ICCV).Seoul:IEEE,2019:1314-1324.
|
| 16 |
LIU S, QI L, QIN H F,et al .Path aggregation network for instance segmentation[C]∥ Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Salt Lake City:IEEE,2018:8759-8768.
|
| 17 |
YANG L X, ZHANG R Y, LI L D,et al .Simam:a simple,parameter-free attention module for convolutional neural networks[C]∥ Proceedings of International Conference on Machine Learning (ICML).Williamstown:PMLR,2021:11863-11874.
|
| 18 |
RAMACHANDRAN P, ZOPH B, LE Q V .Searching for activation functions[J].arXiv preprint arXiv:,2017.
|
| 19 |
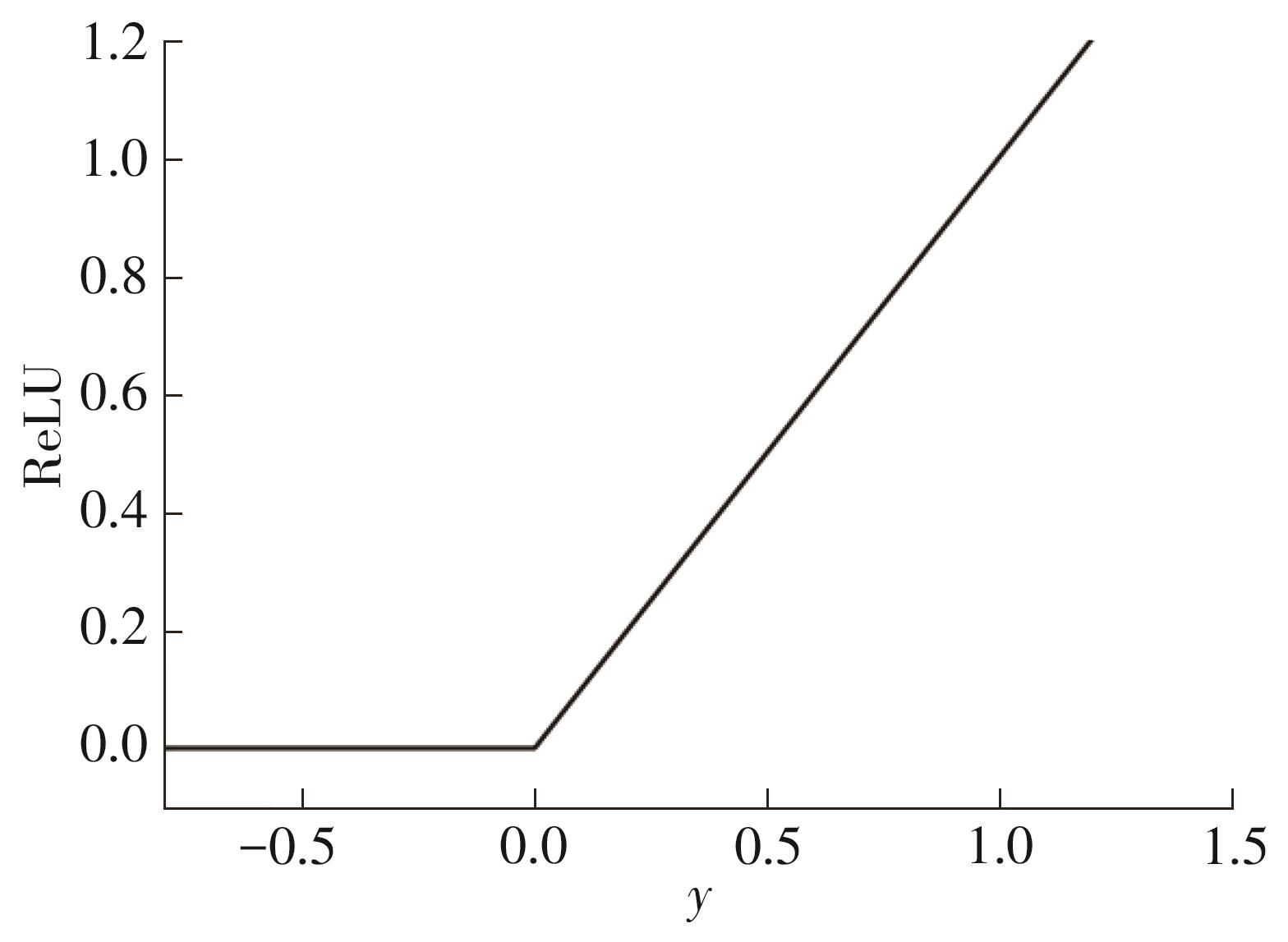
GLOROT X, BORDES A, BENGIO Y .Deep sparse rectifier neural networks[C]∥ Proceedings of Fourteenth International Conference on Artificial Intelligence and Statistics.Fort Lauderdale:JMLR,2011:315-323.
|
| 20 |
GEIGER A, LENZ P, URTASUN R .Are we ready for autonomous driving?the KITTI vision benchmark suite[C]∥ Proceedings of 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Providence:IEEE,2012:3354-3361.
|
| 21 |
NEUBECK A, VAN GOOL L .Efficient non-maximum suppression[C]∥ Proceedings of 18th International Conference on Pattern Recognition (ICPR).Hong Kong:IEEE,2006:850-855.
|
| 22 |
LIN T Y, DOLLÁR P, GIRSHICK R,et al .Feature pyramid networks for object detection[C]∥ Proceedings of 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Honolulu:IEEE,2017:2117-2125.
|
| 23 |
ZHANG X X, LI N, ZHANG R X .An improved lightweight network MobileNetv3 based YOLOv3 for pedestrian detection[C]∥ Proceedings of 2021 IEEE International Conference on Consumer Electronics and Computer Engineering (ICCECE).Guangzhou:IEEE,2021:114-118.
|
| 24 |
WANG S Y, ZHAO J,TA N,et al .A real-time deep learning forest fire monitoring algorithm based on an improved Pruned+ KD model[J].Journal of Real-Time Image Processing,2021,18(6):2319-2329.
|
| 25 |
HOWARD G, ZHU M L, CHEN B,et al .Mobilenets:efficient convolutional neural networks for mobile vision applications[J].arXiv preprint arXiv:,2017.
|
| 26 |
SANDLER M, HOWARD A, ZHU M L,et al .Mobilenetv2:inverted residuals and linear bottlenecks[C]∥ Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Salt Lake City:IEEE,2018:4510-4520.
|
| 27 |
HU J, SHEN L, SUN G .Squeeze-and-excitation networks[C]∥ Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Salt Lake City:IEEE,2018:7132-7141.
|
| 28 |
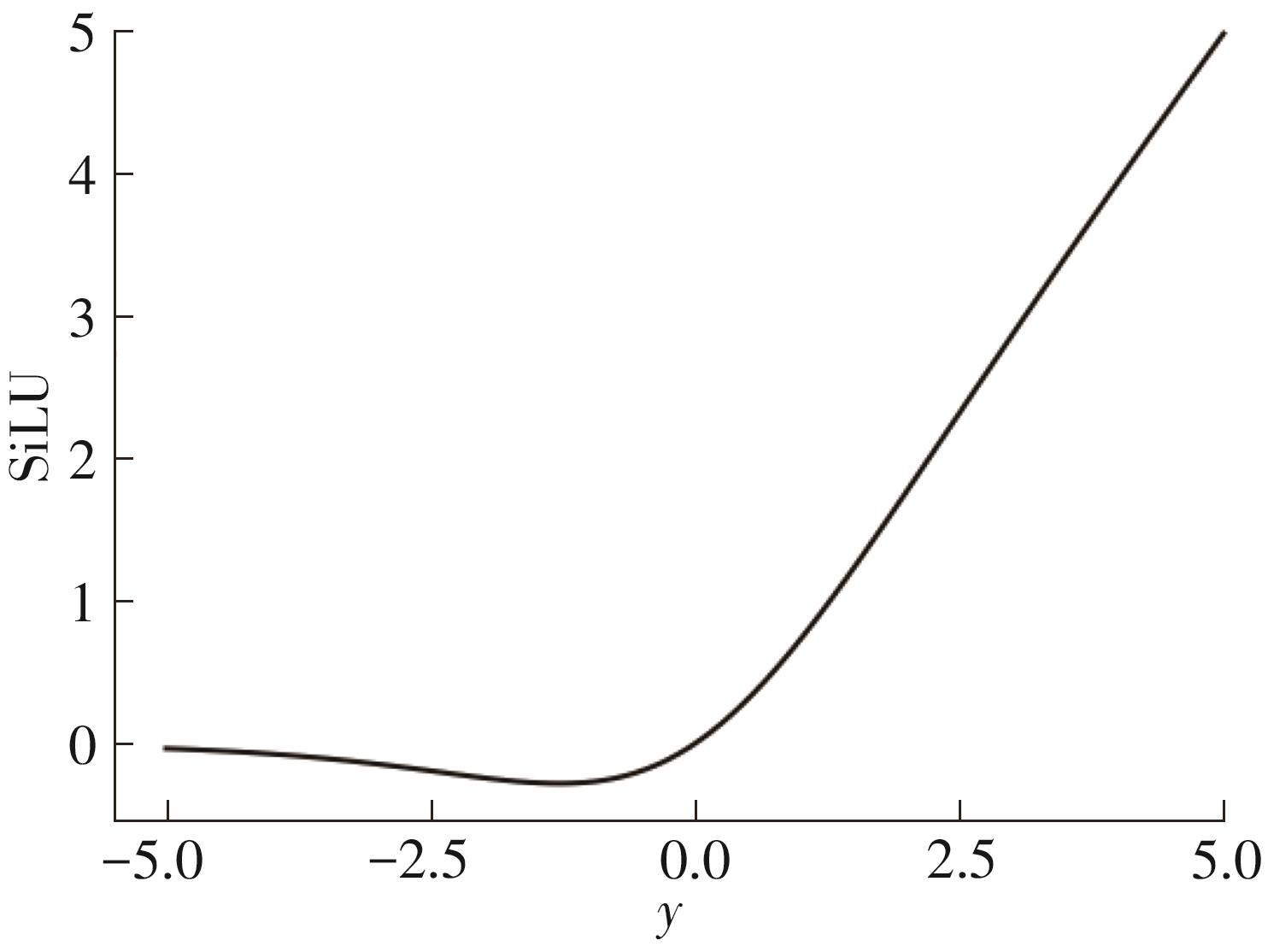
ELFWING S, UCHIBE E, DOYA K .Sigmoid-weighted linear units for neural network function approximation in reinforcement learning[J].Neural Networks,2018,107:3-11.
|
| 29 |
MA N N, ZHANG X Y, LIU M,et al .Activate or not:learning customized activation[C]∥ Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Nashville:IEEE,2021:8032-8042.
|
| 30 |
LIU S T, HUANG D, WANG Y H .Learning spatial fusion for single-shot object detection[J].arXiv preprint arXiv:,2019.
|
| 31 |
GUO M H, XU T X, LIU J J,et al .Attention mechanisms in computer vision:a survey[J].Computational Visual Media,2022,8(3):331-368.
|
| 32 |
GEIGER A, LENZ P, STILLER C,et al .Vision meets robotics:the KITTI dataset[J].The International Journal of Robotics Research,2013,32(11):1231-1237.
|
| 33 |
OKSUZ K, CAM B C, KALKAN S,et al .Imbalance problems in object detection:a review[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2020,43(10):3388-3415.
|
 ), 宁睿厚
), 宁睿厚