
收稿日期: 2025-06-20
网络出版日期: 2025-09-25
基金资助
甘肃省科技计划项目(25CXGA031);甘肃省优秀研究生“创新之星”项目(2025CXZX-685)
A Long-Range Lane Detection Method with Enhanced Spatial Perception
Received date: 2025-06-20
Online published: 2025-09-25
Supported by
the Science and Technology Plan Project of Gansu Province(25CXGA031)
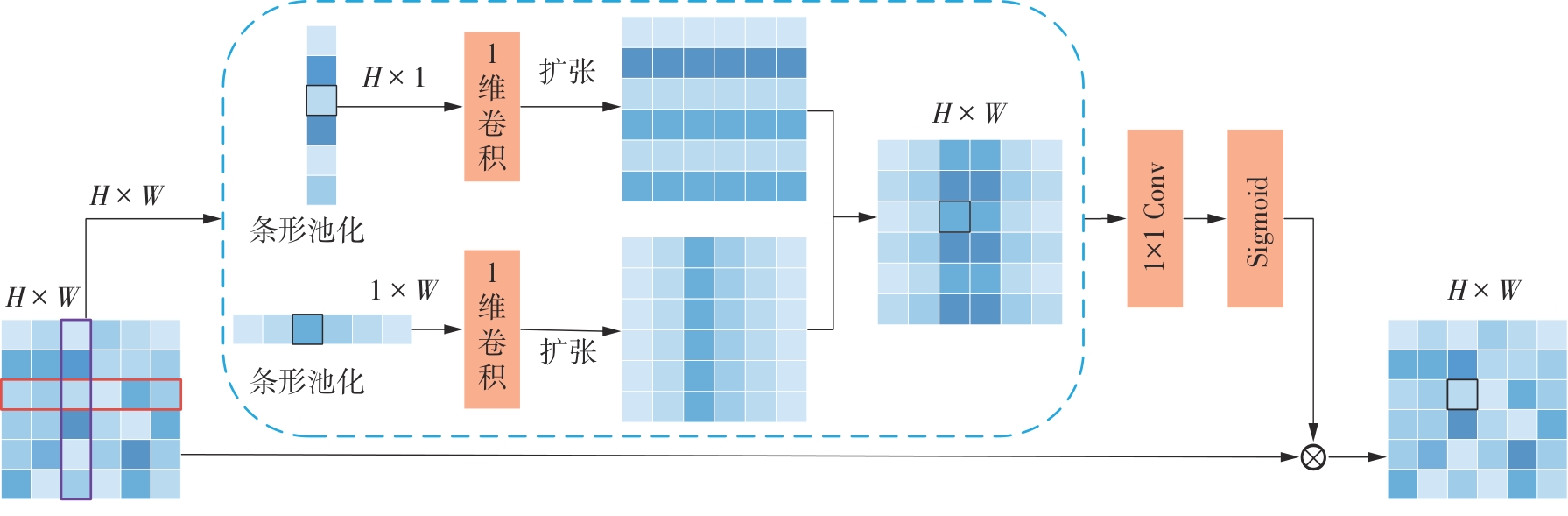
车道线检测作为智能汽车视觉导航系统的核心技术,其性能直接影响到车辆的路径引导与转向控制,对提升交通安全性和导航效率具有重要意义。车道线图像中背景信息往往占据主导地位,特别是远距离车道线存在特征小、标记缺失或被遮挡等问题,同时伴随视觉上的宽度变化,导致远距离车道线比正常车道线更加难以识别。为解决这一问题,该文提出了结合增强空间感知的车道线检测方法。该方法首先针对车道线在图像中呈细长结构的特点,在主干网络中引入条形池化,以细化车道线信息的表示;然后将增强空间感知优化器(ESAO)和车道线多尺度聚合器(LMSA)相结合,以抑制无关背景和增强远距离车道线特征,进而提高车道线检测的准确性和稳定性;最后,通过全局和局部斜率一致性损失函数自适应调整车道线形状与位置,以保持预测车道线与地面真实情况之间的形状一致性。在2个车道线检测数据集TuSimple和CULane上的实验结果表明,该方法优于对比实验中最优秀的方法,在数据集TuSimple上的F1分数和准确率分别提高0.58和0.19个百分点,在数据集CULane上的F1@50提高1.14个百分点,特别是在远距离道路场景中表现的性能更加稳定。
王耀琦 , 卢亚琦 , 王小鹏 . 结合增强空间感知的远距离车道线检测方法[J]. 华南理工大学学报(自然科学版), 2026 , 54(2) : 62 -76 . DOI: 10.12141/j.issn.1000-565X.250181
Lane detection serves as a core technology for the visual navigation systems of intelligent vehicles. Its performance directly impacts a vehicle’s path guidance and steering control, which is of great significance for improving traffic safety and navigation efficiency. In lane images, background information often dominates, especially when distant lane markings exhibit challenges such as small feature size, absence, or occlusion, coupled with perspective-induced width variations. These issues make distant lane detection considerably more challenging than detecting nearby lanes. To address this problem, this paper proposed a lane detection method enhanced with spatial perception. Firstly, conside-ring the elongated morphology of lane markings in images, a strip-pooling module was incorporated into the backbone network to refine the representation of lane information. Furthermore, an Enhanced Spatial-Aware Optimizer (ESAO) was integrated with a Lane Multi-Scale Aggregator (LMSA) to suppress irrelevant background interference and enhance the features of distant lane markings, thereby improving the accuracy and robustness of lane detection. Finally, a global and local slope consistency loss function is designed to adaptively adjust the shape and position of lane lines, maintaining geometric consistency between the predicted lanes and the ground truth. Experimental evaluations conducted on the TuSimple and CULane benchmarks demonstrate that the proposed approach outperforms the state-of-the-art methods in comparative experiments. Specifically, it achieves improvements of 0.58 percentage points in F1 score and 0.19 percen-tage points in accuracy on the TuSimple dataset, and 1.14 percentage points in F1@50 on the CULane dataset. Notably, the method exhibits more stable performance, particularly in long-range road scenarios.
| [1] | GUO J, HARMATI I .Lane-changing decision modelling in congested traffic with a game theory-based decomposition algorithm[J].Engineering Applications of Artificial Intelligence,2022,107:104530/1-20. |
| [2] | WU Y, ZHAO L, LU J,et al .Dense hybrid proposal modulation for lane detection[J].IEEE Transactions on Circuits and Systems for Video Technology,2023,33(11):6845-6859. |
| [3] | DAI W, LI Z, XU X,et al .Enhanced cross layer refinement network for robust lane detection across diverse lighting and road conditions[J].Engineering Applications of Artificial Intelligence,2025,139:109473/1-11. |
| [4] | SANG I C, NORRIS W R .Improved generalizability of CNN based lane detection in challenging weather using adaptive preprocessing parameter tuning[J].Expert Systems with Applications,2025,275:127055/1-9. |
| [5] | QI W Q, ZHAO G Y, MA F L,et al .CLRKDNet:speeding up lane detection with knowledge distillation[EB/OL].(2024-05-21)[2025-05-22]. . |
| [6] | PAN X, SHI J, LUO P,et al .Spatial as deep:spatial CNN for traffic scene understanding[C]∥ Proceedings of the 32nd AAAI Conference on Artificial Intelligence.New Orleans:AAAI,2018:7276-7283. |
| [7] | ZHENG T, FANG H, ZHANG Y,et al .RESA:recurrent feature-shift aggregator for lane detection[C]∥ Proceedings of the 35th AAAI Conference on Artificial Intelligence.Palo Alto:AAAI,2021:3547-3554. |
| [8] | LIU R, YUAN Z, LIU T,et al .End-to-end lane shape prediction with transformers[C]∥ Proceedings of 2021 IEEE Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2021:3693-3701. |
| [9] | WANG J, MA Y, HUANG S,et al .A keypoint-based global association network for lane detection[C]∥ Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:1382-1391. |
| [10] | ZHENG T, HUANG Y, LIU Y,et al .CLRNetV2:a faster and stronger lane detector[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2025,47(6):4271-4284. |
| [11] | TABELINI L, BERRIEL R, PAIXAO T M,et al .Keep your eyes on the lane:real-time attention-guided lane detection[C]∥ Proceedings of 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Nashville:IEEE,2021:294-302. |
| [12] | QIN Z, WANG H, LI X .Ultra fast structure-aware deep lane detection[C]∥ Proceedings the 16th European Conference on Computer Vision.Glasgow:Springer,2020:276-291. |
| [13] | 岳永恒,赵志浩 .基于深度学习的车道线检测算法[J].华南理工大学学报(自然科学版),2025,53(9):22-30. |
| YUE Yongheng, ZHAO Zhihao .Lane line detection algorithm based on deep learning[J].Journal of South China University of Technology(Natural Science Edition),2025,53(9):22-30. | |
| [14] | ZHENG T, HUANG Y, LIU Y,et al .CLRNet:cross layer refinement network for lane detection[C]∥ Proceedings of 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition.New Orleans:IEEE,2022:898-907. |
| [15] | DING Z, DENG Y, LI C,et al .Lane detection via disentangled representation network with slope consistency loss[J].Engineering Applications of Artificial Intelligence,2024,138:109449/1-12. |
| [16] | Tusimple .Tusimple lane detection benchmark[EB/OL].(2020-10-07)[2025-05-20].. |
| [17] | HE K, ZHANG X, REN S,et al .Deep residual learning for image recognition[C]∥ Proceedings of 2016 IEEE Conference on Computer Vision and Pattern Recognition.Las Vegas:IEEE,2016:770-778. |
| [18] | KAO Y, CHE S, ZHOU S,et al .LHFFNet:a hybrid feature fusion method for lane detection[J].Scientific Reports,2024,14:16353/1-17. |
| [19] | HOU Q, ZHANG L, CHENG M M,et al .Strip poo-ling:rethinking spatial pooling for scene parsing[C]∥ Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Seattle:IEEE,2020:4003-4012. |
| [20] | CAO Y, XU J, LIN S,et al .GCNet:non-local networks meet squeeze-excitation networks and beyond[C]∥ Proceedings of 2019 IEEE/CVF International Conference on Computer Vision Workshops.Seoul:IEEE,2019:1971-1980. |
| [21] | HU J, SHEN L, SUN G .Squeeze-and-excitation networks[C]∥ Proceedings of 2018 IEEE Conference on Computer Vision and Pattern Recognition.Salt Lake City:IEEE,2018:7132-7141. |
| [22] | OUYANG D, HE S, ZHANG G,et al .Efficient multi-scale attention module with cross-spatial learning[C]∥ Proceedings of 2023 IEEE International Confe-rence on Acoustics,Speech and Signal Processing.Rhodes Island:IEEE,2023:1-5. |
| [23] | ZHU X, HU H, LIN S,et al .Deformable ConvNets v2:more deformable,better results[C]∥ Procee-dings of 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Long Beach:IEEE,2019:9308-9316. |
| [24] | HONDA H, UCHIDA Y .CLRerNet:improving confidence of lane detection with LaneIoU[C]∥ Procee-dings of 2024 IEEE/CVF Winter Conference on Applications of Computer Vision.Waikoloa:IEEE,2024:1176-1185. |
| [25] | LOSHCHILOV I, HUTTER F .Decoupled weight decay regularization[EB/OL].(2017-11-14)[2025-05-22].. |
| [26] | LIU L, CHEN X, ZHU S,et al .CondLaneNet:a top-to-down lane detection framework based on conditional convolution[C]∥ Proceedings of 2021 IEEE/CVF International Conference on Computer Vision.Montreal:IEEE,2021:3773-3782. |
| [27] | QIN Z, ZHANG P, LI X .Ultra fast deep lane detection with hybrid anchor driven ordinal classification[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2022,46(5):2555-2568. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

