
收稿日期: 2025-03-05
网络出版日期: 2025-09-23
基金资助
国家自然科学基金青年项目(52402375);交通部交通运输行业重点科技项目(2021-ZD2-047);交通部交通运输行业重点科技项目(2022-ZD6-116);北京市教委科技一般项目(KM202410005002)
Predictive Motion Planning for Intelligent Connected Vehicles Based on Transformer Architecture
Received date: 2025-03-05
Online published: 2025-09-23
Supported by
the Young Scientists Fund of the National Natural Science Foundation of China(52402375);the Key Science and Technology Program of the Transportation Industry, Ministry of Transport(2021-ZD2-047)
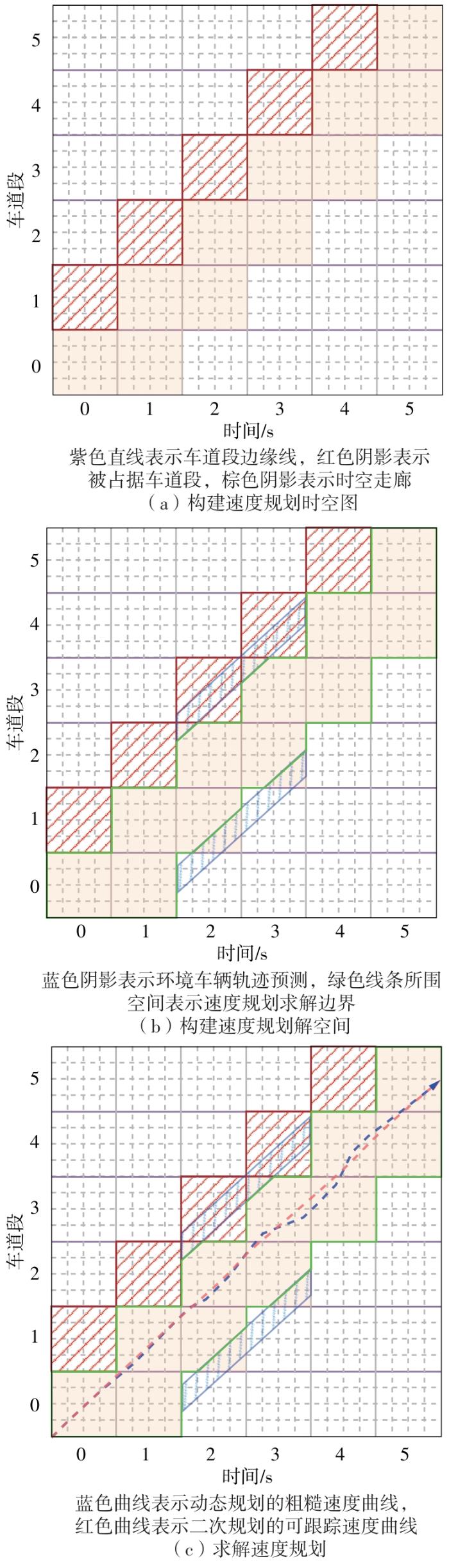
智能网联车辆在复杂交通场景中的高效、安全运动规划是自动驾驶领域的关键挑战。该研究基于Transformer提出了ST-Trans交通预测模型,并通过ST-Trans开发了用于智能网联车辆的预测性运动规划器。ST-Trans利用Transformer从动态高精度地图提供的实时车辆数据和车道段结构信息中挖掘交通时空演化规律来预测车道段的未来交通状态,并利用车道段连通性和交叉口信号相位信息进一步提升预测准确性。模型采用编码器-解码器架构,通过车道编码器融合车辆与车道特征,道路编码器建模动态拓扑关系,解码器迭代生成未来交通状态序列。预测结果显示ST-Trans在平均绝对误差、均方根误差和准确率上分别比最优基准线模型高出12.2%、12.1%和3.55个百分点。基于ST-Trans的预测结果,预测性运动规划器采用双层结构,底层路径规划器动态选择目标点并融合动态规划与二次规划生成平滑路径,上层速度规划器构建时空走廊以压缩解空间,并同样结合动态规划与二次规划生成安全高效的速度曲线,从而显著降低运动规划任务的求解复杂度。该研究结合SUMO和CARLA对预测运动规划器进行了仿真实验,结果表明,基于ST-Trans的预测运动规划器能够实现预测性路径和速度规划,并在安全性、效率、舒适性和计算速度方面优于传统运动规划器。实验验证了所提方法能有效缩短高风险状态持续时间,提高通行效率,并保持较低的计算延迟。
李安然 , 潘芋燕 , 徐震林 , 高博麟 , 李永行 , 于洪晟 , 陈艳艳 . 基于Transformer的智能网联车辆预测性运动规划[J]. 华南理工大学学报(自然科学版), 2026 , 54(3) : 52 -64 . DOI: 10.12141/j.issn.1000-565X.250056
Efficient and safe motion planning for intelligent connected vehicles in complex traffic scenarios remains a pivotal challenge in the field of autonomous driving. This research proposed ST-Trans traffic prediction model based on the Transformer architecture and developed a predictive motion planner for intelligent connected vehicles leveraging ST-Trans. The ST-Trans model utilizes the Transformer architecture to mine spatial-temporal evolution patterns from real-time vehicle data and lane segment structural information provided by dynamic high-definition maps, thereby predicting future traffic states of lane segments. It further enhances prediction accuracy by incorporating lane segment connectivity and intersection signal phase information. The model adopts an encoder-decoder framework, where a lane encoder fuses vehicle and lane features, a road encoder models dynamic topological relationships, and a decoder iteratively generates future traffic state sequences. Experimental results demonstrate that ST-Trans outperforms the optimal baseline model by 12.2%, 12.1%, and 3.55 percentage points in terms of mean absolute error(MAE), root mean square error(RMSE), and accuracy, respectively. Based on the predictions from ST-Trans, the proposed predictive motion planner employs a two-layer structure. The lower-layer path planner dynamically selects target points and integrates dynamic programming with quadratic programming to generate smooth paths. The upper-layer speed planner constructs spatio-temporal corridors to compress the solution space and similarly combines dynamic programming and quadratic programming to generate safe efficient, and comfortable speed profiles. This structure significantly reduces the computational complexity of the motion planning task. Simulation experiments were conducted using SUMO and CARLA to evaluate the predictive motion planner. The results indicate that the ST-Trans-based predictive motion planner successfully implements predictive path and speed planning, and outperforms traditional motion planners in terms of safety, efficiency, comfort, and computational speed. The experiments verify that the proposed method effectively shortens the duration of high-risk states, improves traffic throughput and maintains low computational latency.
| [1] | GAO B, WAN K, CHEN Q, et al .A review and outlook on predictive cruise control of vehicles and typical applications under cloud control system[J].Machine Intelligence Research, 2023, 20(5): 614-639. |
| [2] | BAO Z, HOSSAIN S, LANG H, et al .High-definition map generation technologies for autonomous driving[EB/OL].(2022-06-24)[2025-11-10].arXiv preprint,2022:arXiv:. |
| [3] | DONG J, XU Q, WANG H, et al .Mixed cloud control testbed:validating vehicle-road-cloud integration via mixed digital twin[J].IEEE Transactions on Intelligent Vehicles, 2023, 8(4): 2723-2736. |
| [4] | 冯昶,杜清运,范晓宇,等 .高精动态地图基础平台众源更新技术路线研究[J].测绘地理信息,2023,48(1): 10-15. |
| FENG Chang, DU Qingyun, FAN Xiaoyu, et al .A crowdsourcing update technology route of HD dynamic map basic platform[J].Journal of Geomatics,2023,48(1): 10-15. | |
| [5] | SUNG I, CHOI B, NIELSEN P .On the training of a neural network for online path planning with offline path planning algorithms[J].International Journal of Information Management, 2021, 57: 102142/1-9. |
| [6] | NOTO M, SATO H .A method for the shortest path search by extended Dijkstra algorithm[C]∥Proceedings of the 2000 IEEE International Conference on Systems,Man and Cybernetics.Nashville:IEEE,2000: 8-11. |
| [7] | ZHANG Z, ZHAO Z .A multiple mobile robots path planning algorithm based on A-star and Dijkstra algorithm[J].International Journal of Smart Home,2014,8(3):75-86. |
| [8] | SCHMERLING E, JANSON L, PAVONE M .Optimal sampling-based motion planning under differential constraints: the drift case with linear affine dynamics[C]∥Proceedings of the 54th IEEE Conference on Decision and Control.Osaka: IEEE, 2015: 5-18. |
| [9] | KUFFNER J, LAVALLE S .RRT-connect: an efficient approach to single-query path planning[C]∥Proceedings of the 2 000 IEEE International Conference on Robotics and Automation.San Francisco:IEEE,2 000:995-1001. |
| [10] | REDDY T, SUPREETHI K .Optimization of K-means algorithm: ant colony optimization[C]∥Proceedings of the 2017 International Conference on Computing Methodologies and Communication.Erode:IEEE,2017:530-535. |
| [11] | XIN J, ZHONG J, YANG F, et al .An improved genetic algorithm for path-planning of unmanned surface vehicle[J].Sensors, 2019, 19(11): 2640/1-23. |
| [12] | PADEN B, ?áP M, YONG S Z, et al .A survey of motion planning and control techniques for self-driving urban vehicles[J].IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55. |
| [13] | DUBINS L .On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J].American Journal of Mathematics, 1957, 79(3): 497-516. |
| [14] | REEDS J, SHEPP L .Optimal paths for a car that goes both forward and backward[J].Pacific Journal of Mathematics, 1991, 145(2): 367-393. |
| [15] | WANG S, WANG Y, TAN M, et al .Path planning of underwater biomimetic robot[M]∥Underwater Biomimetic Vehicle-Manipulator System.Singapore:Springer,2023: 89-125. |
| [16] | LIANG Z, ZHENG G, LI J .Automatic parking path optimization based on Bezier curve fitting[C]∥Proceedings of the 2012 IEEE International Conference on Automation and Logistics.Zhengzhou:IEEE,2012:583-587. |
| [17] | ZIEGLER J, BENDER P, DANG T, et al .Trajectory planning for Bertha—a local, continuous method[C]∥Proceedings of the 2014 IEEE Intelligent Vehicles Symposium.Dearborn:IEEE,2014:450-457. |
| [18] | WERLING M, KAMMEL S, ZIEGLER J, et al .Optimal trajectories for time-critical street scenarios using discretized terminal manifolds[J].The International Journal of Robotics Research, 2012, 31(3):346-359. |
| [19] | YU L, SHAO X, WEI Y, et al .Intelligent land-vehicle model transfer trajectory planning method based on deep reinforcement learning[J].Sensors,2018,18(9): 2905/1-22. |
| [20] | CHAI R, LIU D, LIU T, et al .Deep learning-based trajectory planning and control for autonomous ground vehicle parking maneuver[J].IEEE Transactions on Automation Science and Engineering, 2023,20(3): 1633-1647. |
| [21] | VASWANI A, SHAZEER N, PARMAR N, et al .Attention is all you need[C]∥Proceedings of 31st Conference on Neural Information Processing Systems.Long Beach: NIPS, 2017: 6000-6010. |
| [22] | BARMPOUNAKIS E, GEROLIMINIS N .On the new era of urban traffic monitoring with massive drone data: the pNEUMA large-scale field experiment[J].Transportation Research Part C: Emerging Technologies, 2020, 111: 50-71. |
| [23] | WERLING M, ZIEGLER J, KAMMEL S, et al .Optimal trajectory generation for dynamic street scenarios in a frenét frame[C]∥Proceedings of the 2010 IEEE International Conference on Robotics and Automation.Anchorage: IEEE, 2010: 987-993. |
| [24] | MCNAUGHTON M, URMSON C, DOLAN J, et al .Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]∥Proceedings of the 2011 IEEE International Conference on Robotics and Automation.Shanghai: IEEE, 2011: 4889-4895. |
| [25] | PIVTORAIKO M, KELLY A .Differentially constrained motion replanning using state lattices with graduated fidelity[C]∥Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems.Nice: IEEE, 2008: 2611-2616. |
| [26] | ZIEGLER J, BENDER P, SCHREIBER M, et al .Making bertha drive—an autonomous journey on a historic route[J].IEEE Intelligent Transportation Systems Magazine, 2014, 6(2): 8-20. |
| [27] | ZHOU Z, YE L, WANG J, et al .HiVT: Hierarchical vector transformer for multi-agent motion prediction[C]∥Proceedings of the 2022 IEEE/CVF Confe-rence on Computer Vision and Pattern Recognition.New Orleans: IEEE, 2022: 8813-8823. |
| [28] | MERCY T, van PARYS R, PIPELEERS G .Spline-based motion planning for autonomous guided vehicles in a dynamic environment[J].IEEE Transactions on Control Systems Technology,2017, 26(3):1-8. |
| [29] | LI A, XU Z, LI W, et al .Urban signalized intersection traffic state prediction:a spatial-temporal graph model integrating the cell transmission model and transformer[J].Applied Sciences,2025,15(5):2377/1-23. |
| [30] | HAMED M, AL-MASAEID H, SAID Z .Short-term prediction of traffic volume in urban arterials[J].Journal of Transportation Engineering,1995,121(3):249-254. |
| [31] | DRUCKER H, BURGES C, KAUFMAN L, et al .Support vector regression machines[J].Advances in Neural Information Processing Systems, 1997, 9:779-784. |
| [32] | ATHEY S, TIBSHIRANI J, WAGER S .Genera-lized random forests[J].The Annals of Statistics,2019, 47(2): 1148-1178. |
| [33] | YE Q, WONG S, SZETO W .Short-term traffic speed forecasting based on data recorded at irregular intervals[C]∥Proceedings of 2010 13th International IEEE Annual Conference on Intelligent Transportation Systems. Madeira Island: IEEE,2010: 1541-1546. |
| [34] | XU Y, LU Y, JI C, et al .Adaptive graph fusion convolutional recurrent network for traffic forecasting[J].IEEE Internet of Things Journal,2023,10(13):11465-11475. |
| [35] | WU Z, PAN S, LONG G, et al .Graph wavenet for deep spatial-temporal graph modeling[EB/OL].(2019-03-31)[2025-11-10].arXiv preprint, 2019: arXiv:. |
| [36] | LOPEZ P, BEHRISCH M, BIEKER-WALZ L,et al .Microscopic traffic simulation using SUMO[C]∥Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems.Maui:IEEE,2018:2575-2582. |
| [37] | DOSOVITSKIY A, ROS G, CODEVILLA F, et al .CARLA: an open urban driving simulator[C]∥Proceedings of the 1st Conference on Robot Learning.Mountain View: PMLR, 2017: 1-16. |
| [38] | FAN H, ZHU F, LIU C, et al .Baidu Apollo EM motion planner[EB/OL].(2018-07-20)[2025-11-10].arXiv preprint,2018:arXiv:. |
| [39] | WESTHOFEN L, NEUROHR C, KOOPMANN T,et al .Criticality metrics for automated driving: a review and suitability analysis of the state of the art[J].Archives of Computational Methods in Engineering,2023,30(1):1-35. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

