
收稿日期: 2024-07-01
网络出版日期: 2024-09-29
基金资助
国家重点研发计划项目(2022YFB2503404)
Complex Scenario Construction Method for Navigation Pilot Based on Natural Driving Behaviour
Received date: 2024-07-01
Online published: 2024-09-29
Supported by
the National Key R & D Program of China(2022YFB2503404)
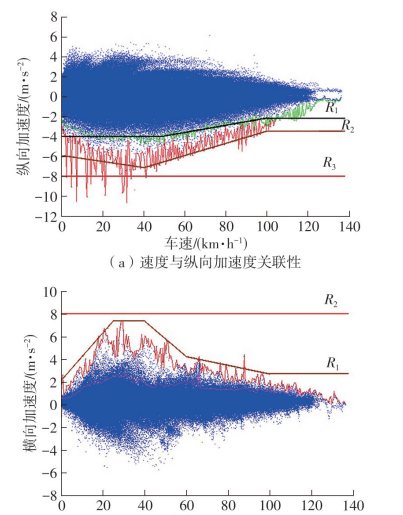
智能驾驶系统测试评价作为智能网联汽车研发的重点,需要重点关注车辆在复杂气象和复杂交通流场景中的真实性能表现。该研究提出一种基于天气复杂度和交通复杂度的复杂场景构建方法,用于满足复杂交通环境导航智能驾驶的测试需求。基于中国大型实车路试项目(China-FOT)自然驾驶数据,分析车辆速度、纵向加速度、横向加速度、横摆角速度等车辆动力学参数,通过拟合安全边界包络线构建驾驶行为风险等级,筛选提取自然驾驶危险工况,用于明确导航智能驾驶功能安全相关的基本场景类型,通过基于多动态目标物基础场景关联特征组合的交通交互行为耦合方法构建复杂场景类型;基于量化的自然天气因素,通过自然驾驶行为特征分布,构建光照因素、降雨因素、雾气因素等影响指标表征天气复杂度;基于信息熵理论,通过支持向量机方法和K-折交叉验证方法,构建相遇角度、相对距离、相对速度等复杂度参数,用于表征复杂场景的交通状态;针对复杂场景开展封闭场地实车试验,通过真实的测试性能评价参数得到测试场景的复杂度,验证复杂场景的合理性。为导航智能驾驶功能构建能够表征真实复杂交通环境的测试场景,为智能网联汽车智能驾驶系统的优化迭代提供支持。
武彪 , 任洪泽 , 郑联庆 , 朱西产 , 马志雄 . 基于自然驾驶行为的智能驾驶复杂场景构建方法[J]. 华南理工大学学报(自然科学版), 2025 , 53(2) : 38 -47 . DOI: 10.12141/j.issn.1000-565X.240346
As the focus of research and development of intelligent connected vehicles, the test and evaluation of autonomous driving systems must focus on the real performance of vehicles in complex weather and complex traffic flow scenarios. This research proposed a method for constructing complex scenarios based on weather complexity and traffic complexity to meet the testing requirements of intelligent driving systems in challenging traffic environments. Using natural driving data from China’s large-scale field operational test project (China-FOT), the study analyzed vehicle dynamics parameters such as speed, longitudinal acceleration, lateral acceleration, and yaw rate. By fitting safety boundary envelopes, driving behavior risk levels were defined, and hazardous scenarios in natural driving were identified. These scenarios help clarify the fundamental scene types related to the functional safety of navigation-based intelligent driving. A traffic interaction coupling method, incorporating multiple dynamic target features, was applied to construct complex scenario types. The quantified natural weather factors were used to construct influence indicators, such as light factor, rainfall factor, fog factor, which are employed to characterize the weather complexity through the distribution of natural driving behavior characteristics. The complexity parameters, including encounter angle, relative distance, relative speed, were constructed using the Support Vector Machines and K-fold cross validation methods to characterize the traffic state of the complex scenarios. In order to ascertain the complexity of the test scenario, a closed field vehicle test was conducted, during which the real test performance evaluation parameters were employed to verify the rationality of the complex scenario construction. This research indicates the necessity to construct a test scenario that can accurately portray the real-world complex traffic environment for the navigation pilot driving functions. This will facilitate the optimization and iteration of the autonomous driving system of intelligent connected vehicles.
| 1 | 导航智能驾驶测评规程(2020版修订版): IVISTA SMNP TPR A0—2022 [S]. |
| 2 | Intelligent transport systems-Forward vehicle collision systems-Performance requirements and test procedures: [S]. |
| 3 | Intelligent transport systems-Lane departure warning systems-Performance requirements and test procedures: [S]. |
| 4 | Intelligent transport systems-Adaptive cruise control systems-Performance requirements and test procedures: [S]. |
| 5 | Uniform provisions concerning the approval of vehicles with regard to automated lane keeping systems:UN ECE R157—2021 [S]. |
| 6 | RIEDMAIE S, PONN T, LUDWIG D,et al .Survey on scenario-based safety assessment of automated vehicles[J].IEEE Access,2020,8(4):87456-87477. |
| 7 | HAUER F, SCHMIDT T, HOLZMüLLER B,et al .Did we test all scenarios for automated and autonomous driving systems?[C]?∥ Proceeding of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC).[S.l.]: IEEE,2019:2950-2955. |
| 8 | DUAN J, GAO F, HE Y,et al .Test scenario generation and optimization technology for intelligent driving systems[J].IEEE Intelligent Transportation Systems Magazine,2020,14(1):115-127. |
| 9 | GELDER E,HOF J, CATOR E,et al .Scenario para-meter generation method and scenario representativeness metric for scenario-based assessment of automated vehicles[J].IEEE Transactions on Intelligent Transportation Systems,2022,23(10):18794-18807. |
| 10 | 陈吉清,舒孝雄,兰凤崇,等 .典型危险事故特征的自动驾驶测试场景构建[J].华南理工大学学报(自然科学版),2021,49(5):1-8. |
| CHEN Jiqing, SHU Xiaoxiong, LAN Fengchong,et al .Construction of autonomous vehicles test scenarios with typical dangerous accident characteristics[J].Journal of South China University of Technology (Natural Science Edition),2021,49(5):1-8. | |
| 11 | INDAHENG F, KIM E, VISWANADHA K,et al .A scenario-based platform for testing autonomous vehicle behavior prediction models in simulation[J].arxiv preprint arxiv:2110.14870,2021. |
| 12 | STADLER C, MONTANARI F, BARON W,et al .A credibility assessment approach for scenario-based virtual testing of automated driving functions[J].IEEE Open Journal of Intelligent Transportation Systems,2022,3(2):45-60. |
| 13 | 李平飞,金思雨,胡文浩,等 .用于自动驾驶仿真测试的车——车事故场景复杂度评价[J].汽车安全与节能学报,2022,13(4):697-704. |
| LI Pingfei, JIN Siyu, HU Wenhao,et al .Complexity evaluation of vehicle-vehicle accident scenarios for autonomous driving simulation tests[J].Journal of Automotive Safety and Energy,2022,13(4):697-704. | |
| 14 | 董汉,舒伟,陈超,等 .危险驾驶工况场景的复杂度评估方法研究[J].汽车工程,2020,42(6):808-814. |
| DONG Han, SHU Wei, CHEN Chao,et al .Research on complexity evaluation method of dangerous driving scenes[J].Automotive Engineering,2020,42(6): 808-814. | |
| 15 | MA B, ZHANG Z, GUO G,et al .Study on influence factors of intelligent connected vehicle (ICV) performance under complex weather conditions[C]?∥ Proceeding of the 2020 E3S Web of Conferences.[S.l.]:EDP Sciences,2020,213:02024/924-927. |
| 16 | MA B, LI W, ZHANG Z,et al .Research on weather condition influence factors on intelligent connected vehicle[C]?∥ Proceeding of Journal of Physics:Confe-rence Series.[S.l.]:IOP Publishing,2020,1550(3):032021/122-125. |
| 17 | LEBLANC D J, SAYER J, WINKLER C,et al .Road departure crash warning system field operational test:methodology and results.volume 1:technical report[R].Ann Arbor:Transportation Research Institute,University of Michigan,2006. |
| 18 | DiINGUS T A, KLAUER S, NEALE V,et al .The 100-car naturalistic driving study:phase Ⅱ-results of the 100-car field experiment[R].Washington:National Highway Traffic Safety Administration(NHTSA),United States,2006. |
| 19 | BARNARD Y, KOSKINEN S, NNAMAA S,et al .Data management and data sharing in field operational tests[C]?∥ Proceeding of 2016 Intelligent Transportation Systems.New York:CRC Press,2016:69-82. |
| 20 | HANOWSKI R J, NAKATA A, OLSON R L .Metho-dological overview of the drowsy driver warning system field operational test[J].SAE Transactions,2004,4(5):610-615. |
| 21 | OLSON R L, HANOWSKI R J, HICKMAN J S,et al .Driver distraction in commercial vehicle operations[R].Washington:Department of Transportation,Federal Motor Carrier Safety Administration,United States,2009. |
| 22 | ANTIN J, LEE S, HANKEY J,et al .Design of the in-vehicle driving behavior and crash risk study:in support of the SHRP 2 naturalistic driving study[R].Washington:Transportation Research Board of the National Academies,United States,2011. |
| 23 | ZHANG X, TAO J, TAN K,et al . Finding critical scenarios for automated driving systems:a systematic literature review[J].arXiv Preprint arXiv:2110.08664,2021. |
| 24 | 降水量等级: [S]. |
| 25 | 雾天公路通行条件预警分级: [S]. |
| 26 | YIM J B, PARK D J .Modeling evasive action to be implemented at the minimum distance for collision avoi-dance in a give-way situation[J].Ocean Engineering,2022,263:112-210. |
| 27 | ANAND K, BIANCONI G .Entropy measures for networks:toward an information theory of complex topologies[J].Physical Review E—Statistical,Nonlinear,and Soft Matter Physics,2009,80(4):45-102. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

