
收稿日期: 2022-06-10
网络出版日期: 2022-11-08
基金资助
广东省科技计划项目(2017B010114001);教育部科技计划项目(CXZJHZ201813)
Self-Reset Particle Filter Method Optimized Based on Differential Evolution Algorithm
Received date: 2022-06-10
Online published: 2022-11-08
Supported by
the Science and Technology Planning Project of Guangdong Province(2017B010114001);the Science and Technology Project of the Ministry of Education(CXZJHZ201813)
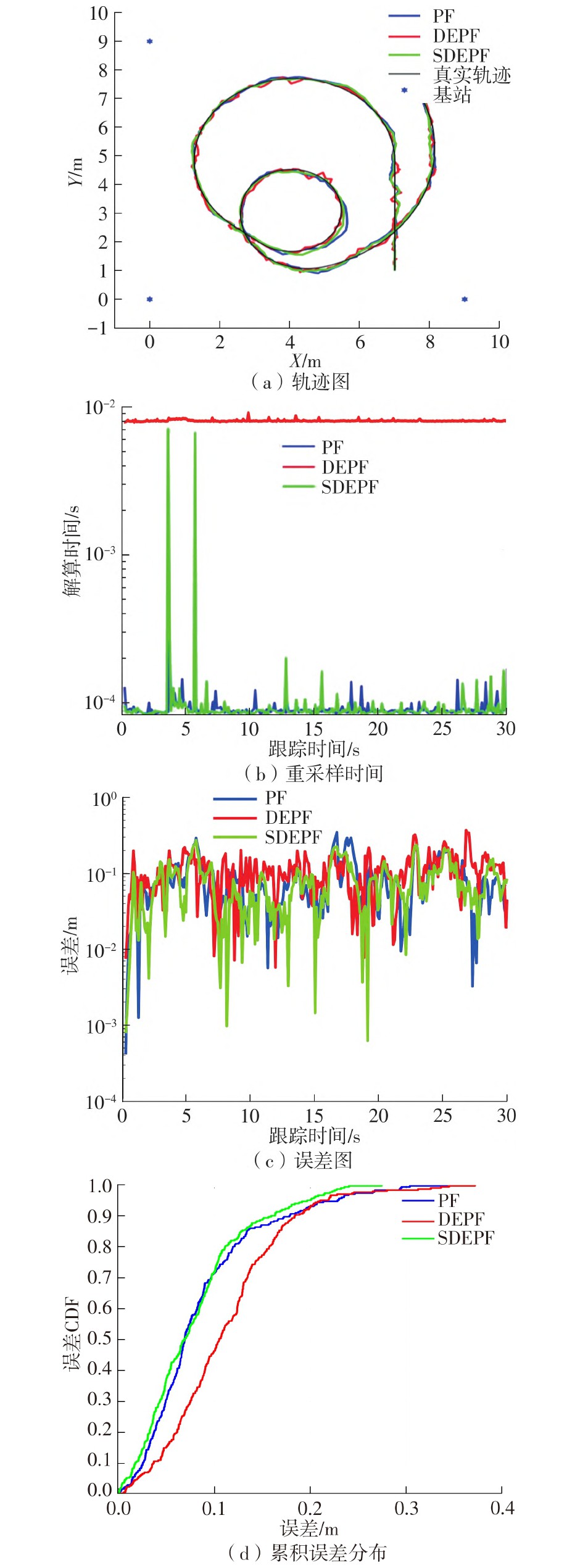
粒子滤波器作为常用的非高斯非线性的滤波方法,已成功地应用于各种工程领域。然而传统的重采样方法导致了粒子贫化的问题,严重降低了滤波估计的精度与鲁棒性。文中提出一种结合跟踪失败检测与改进差分优化融合的自复位粒子滤波方法。首先通过跟踪失败识别方法对滤波估计值进行初步检验,在正常跟踪时不启用优化策略,算法性能与标准粒子滤波无异;在跟踪失败时,通过差分算法对粒子集进行复位,复位过程中设置了粒子置信区间的上下界以防粒子过度集中,并结合检验指示值规避对粒子的多次优化,以缩短算法的估计时间。仿真结果表明,文中算法通过动态调节方式继承了标准粒子滤波和差分进化粒子滤波的优点,有效提高了滤波估计的鲁棒性与估计精度,可在滤波成功时避免启用优化策略以降低算法的整体时间复杂度,并在滤波失败时启用差分优化策略进行自我复位以提高算法估计精度;且在相同定位精度下,其所需粒子数较标准粒子滤波更少,整体时耗较差分进化粒子滤波更低,在建模不确定时也可表现出良好的效果。
文尚胜, 丘志强, 许函铭, 等 . 基于差分算法优化的自复位粒子滤波算法[J]. 华南理工大学学报(自然科学版), 2023 , 51(3) : 133 -145 . DOI: 10.12141/j.issn.1000-565X.220368
As a commonly used non-Gaussian nonlinear filtering method, particle filter has been successfully applied in various engineering fields. However, the traditional resampling method leads to the problem of particle depletion, which seriously reduces the accuracy and robustness of the filter estimation. This paper proposed a self-reset particle filter method that combines tracking failure detection and enhanced differential evolution optimization. Firstly, the filter estimation value is preliminarily checked by the tracking failure identification method, and the optimization strategy is not enabled during normal tracking, and the algorithm performance is consistent with the standard particle filter. When the tracking fails, the particle set is reset by differential optimization. During the reset process, the upper and lower bounds of particle confidence interval are set to prevent the particles from being over-concentrated, and the multiple optimization of the particles is avoided by combining the test indication value to reduce the estimation time of the algorithm. The simulation results show that the proposed algorithm inherits the advantages of standard particle filter and differential evolution particle filter through dynamic adjustment, and it effectively improves the robustness and estimation accuracy of the filter estimation. It can avoid using the optimization strategy to reduce the overall time complexity of the algorithm when the filter is successful, and enable the differential optimization strategy to self-reset when the filter fails. In addition, under the same positioning accuracy, the number of particles required by the algorithm is lower than that of standard particle filter, and the overall time consumption is lower than differential evolution particle filter, which also works well when modeling is uncertain.
| 1 | NIKNEJAD H T, TAKEUCHI A, MITA S,et al .On-road multivehicle tracking using deformable object model and particle filter with improved likelihood estimation[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(2):748-758. |
| 2 | LI H W, WANG J .Particle filter for manoeuvring target tracking via passive radar measurements with glint noise[J].IET Radar,Sonar and Navigation,2012,6(3):180-189. |
| 3 | SCHMIDT S F .The Kalman filter its recognition and development for aerospace applications[J]?.Guide Control,1981,4(1):4-7. |
| 4 | JULIER S J, UHLMANN J K .Unscented filtering and nonlinear estimation[J]?.IEEE Proc,2004,92(3):401-422. |
| 5 | ARULAMPALAM M S, MASKELL S, GORDON N,et al .A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]?.IEEE Transactions on Signal Processing,2002,50(2):174-188. |
| 6 | PAK J M, AHN C K, SHI P,et al .Self-recovering extended Kalman filtering algorithm based on model-based diagnosis and resetting using an assisting FIR filter[J].Neurocomputing,2016,173(3):645-658. |
| 7 | ZHOU N, MENG D, LU S .Estimation of the dynamic states of synchronous machines using an extended particle filter[J]?.IEEE Transactions on Power Systems,2013,28(4):4152-4161. |
| 8 | DU X, WANG Y, HU H,et al .The attitude inversion method of geostationary satellites based on unscented particle filter[J]?.Advances in Space Research,2018,61(8):1984-1996. |
| 9 | XIA B, SUN Z, ZHANG R,et al .A cubature particle filter algorithm to estimate the state of the charge of lithium-ion batteries based on a second-order equivalent circuit model[J].Energies,2017,10(4):457-459. |
| 10 | JING L, VADAKKEPAT P .Interacting MCMC particle filter for tracking maneuvering target[J]?.Digital Signal Processing,2010,20(2):561-574. |
| 11 | 田梦楚,薄煜明,陈志敏,等 .萤火虫算法智能优化粒子滤波[J]?.自动化学报,2016,42(1):90-97. |
| TIAN Meng-chu, BO Yu-ming, CHEN Zhi-min,et al .Firefly algorithm intelligence optimized particle filter[J].Acta Automation Sinica,2016,42(1):90-97. | |
| 12 | ZHANG Z, HUANG C, DING D,et al .Hummingbirds optimization algorithm-based particle filter for maneuvering target tracking[J]?.Nonlinear Dynamics 2019,97(2):1227-1243. |
| 13 | TIAN Y, LU C, WANG Z .Artificial fish swarm algorithm-based particle filter for Li-ion battery life prediction[J]?.Mathematical Problems in Engineering,2014,2014(1):1-10. |
| 14 | ZHOU N, LAU L, BAI R,et al .A genetic optimization resampling based particle filtering algorithm for indoor target tracking[J].Remote Sensing,2021,13(1):132. |
| 15 | MOGHADDASI S S, FARAJI N .A hybrid algorithm based on particle filter and genetic algorithm for target tracking[J]?.Expert Systems with Applications,2020,147:113188-113200. |
| 16 | ZHANG Q B, WANG P, CHEN Z H .An improved particle filter for mobile robot localization based on particle swarm optimization[J].Expert Systems with Applications,2019,135(1):181-193. |
| 17 | JING Z, LI Z .Particle filter based on particle swarm optimization resampling for vision tracking[J].Expert Systems with Applications,2010,37(12):8910-8914. |
| 18 | HAN H, HAO Y S,KUANGRONG .A new immune particle filter algorithm for tracking a moving target[C]?∥Proceedings of the Sixth International Conference on Natural Computation.Shanghai:IEEE,2010:3248-3252. |
| 19 | KUPTAMETEE C, AUNSRI N .A review of resampling techniques in particle filtering framework[J]?.Measurement,2022,193(1):110836-110850. |
| 20 | LIU J S, CHEN R,LOGVINENKO .A theoretical framework for sequential importance sampling with resampling[M]?.New York:Springer,2001:225-246. |
| 21 | MAESSCHALCK R D, Rimbaud D J, MASSART D L .The Mahalanobis distance[J].Chemometrics and Intelligent Laboratory Systems,2000,50(1):1-18. |
| 22 | SMITH R .On the representation of spatial uncertainty[J].The International Journal of Robotics Research,1986,5(4):56-58. |
| 23 | HU J H .Multi-search differential evolution algorithm[J].Applied Intelligence the International Journal of Artificial Intelligence Neural Networks & Complex Problem Solving Technologies,2017,47(1):231-256. |
| 24 | PRICE K V .Differential evolution[M].Berlin,Heidelberg:Springer,2013:187-214. |
| 25 | EIBEN á E, HINTERDING R, MICHALEWICZ Z .Parameter control in evolutionary algorithms[J].IEEE Transactions on Evolutionary Computation,1999,3(2):124-141. |
| 26 | WANG X, CHENG H, HUANG M .QoS multicast routing protocol oriented to cognitive network using competitive coevolutionary algorithm[J].Expert Systems with Applications,2014,41(10):4513-4528. |
| 27 | LIU H, CAI Z, WANG Y .Hybridizing particle swarm optimization with differential evolution for constrained numerical and engineering optimization[J].Applied Soft Computing,2010,10(2):629-640. |
| 28 | HERMAN B .Close approximations of percentage points of the chi-square distribution and poisson confidence limits[J].Journal of the American Statistical Association,1973,68(343):581-584. |
| 29 | HU,Z B, XIONG S W, SU Q H, et al .Finite Markov chain analysis of classical differential evolution algorithm[J]?.Journal of Computational and Applied Mathematics,2014,10(268):121-134. |
| 30 | SOLIS F, WETS R .Minimization by random search techniques[J].Mathematics of Operations Research,1986,6(1):19-30 |
| 31 | WANG F, HE X S, WANG Y,et al .Markov model and convergence analysis based on cuckoo search algorithm[J].Computer Engineering,2012,38(11):180-182. |
| 32 | 骆剑平,李霞,陈泯融 .混合蛙跳算法的Markov模型及其收敛性分析[J].电子学报,2010,38(12):2875-2880. |
| LUO Jian-ping, LI Xia, CHEN Min-rong .The Markov model of shuffled frog leaping alogrithm and its convergence analysis[J]?.Acta Electronica Sinica,2010,38(12):2875-2880 | |
| 33 | GORDON N J, SALMOND D J, SMITH A .Novel approach to nonlinear/non-Gaussian Bayesian state estimation[J].IEE Proceedings F-Radar and Signal Processing,2002,140(2):107-113. |
| 34 | ZHAI G, MENG H D, WANG X Q,et al .A constant speed changing rate and constant turn rate model for maneuvering target tracking[J]?.Sensors,2014,14(3):5239-5253. |
| 35 | SCHUBERT R, ADAM C, OBST M,et al .Empirical evaluation of vehicular models for ego motion estimation[C]∥Proceedings of the 2011 IEEE Intelligent Vehicles Symposium(IV).Baden-Baden:IEEE,2011:534-539. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

