
收稿日期: 2022-11-12
网络出版日期: 2023-03-16
基金资助
国家重点研发计划项目(2020YFB1711300)
Real-Time Template Matching Method for Edge Features
Received date: 2022-11-12
Online published: 2023-03-16
Supported by
the National Key R&D Program of China(2020YFB1711300)
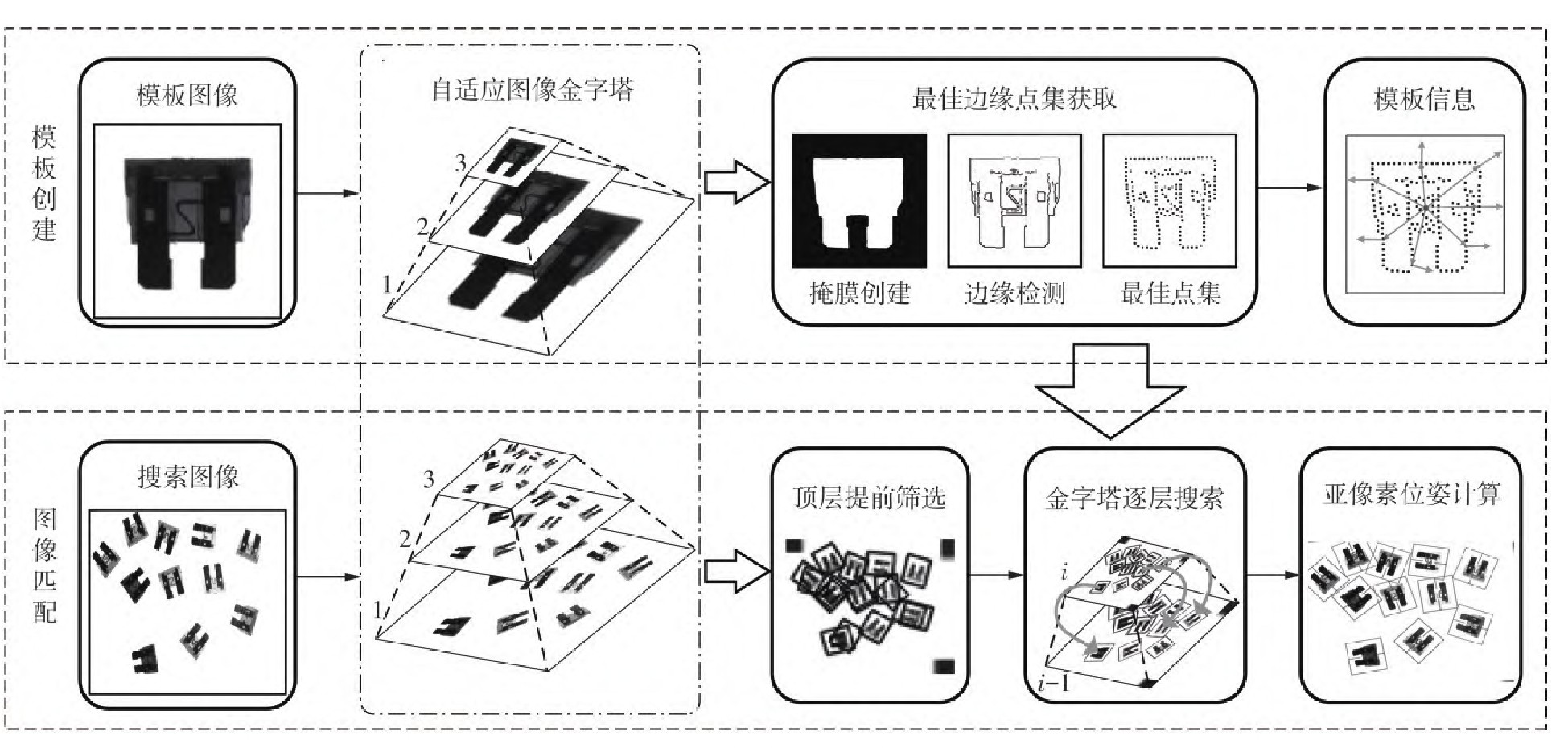
模板匹配是机器视觉领域的一项共性关键技术,目前基于边缘特征的模板匹配方法存在搜索时间长、在复杂环境下匹配准确率低等问题。为了在保证鲁棒性的同时提升实时性,提出了一种面向边缘特征的实时模板匹配方法。首先,在模板创建阶段,提出了一种新型边缘稀疏方法,通过置信评分机制筛选出模板中不变性强的边缘点,在保留模板关键特征的同时降低模板信息冗余,进而保证稳定性并提升计算效率。其次,在基于金字塔搜索的图像匹配阶段,提出了一种顶层提前筛选方法,采用归一化曼哈顿距离作为限制条件在顶层搜索结果中排除错误目标位姿,以加快后续各层的搜索速度。构建了5种工况不同的数据集,对所提模板匹配方法进行了对比验证,并将其应用于面向自由平面位姿的快速视觉点胶工艺。实验结果表明,所提模板匹配方法在显著提升匹配速度的同时能够保证高准确率,并且能够有效克服光照、旋转、缺陷、多目标、遮挡等干扰因素,满足机器视觉场景中对图像匹配的鲁棒性和实时性要求。
王世勇 , 乾国康 , 李迪 , 张舞杰 . 面向边缘特征的实时模板匹配方法[J]. 华南理工大学学报(自然科学版), 2023 , 51(9) : 1 -10 . DOI: 10.12141/j.issn.1000-565X.220745
Template matching is a common key technology in the field of machine vision. Currently, edge feature-based template matching methods are facing challenges such as time-consuming searching and low matching accuracy in a complex environment. In order to ensure the robustness while improving the real-time performance, this paper proposed a real-time edge feature-based template matching method. Firstly, in the stage of template creation, a new edge sparse method was proposed, and it can screen out the strong invariant edge points from the template image. It reduces the redundancy of template information while retaining the key template features to ensure the stability and improve the computing efficiency. Secondly, in the stage of pyramid search-based image-matching, a top-level pre-screening method was proposed. Normalized Manhattan distance was used as a constraint to exclude incorrect target poses from the top search results to speed up the search in subsequent layers. Five datasets with different working conditions were constructed, and the proposed template matching method was compared and applied to the fast visual dispensing process for free plane pose. The experimental results show that the proposed matching method can significantly improve the matching speed while ensuring high accuracy. And it can overcome interference factors such as illumination change, rotation, defects, multiple targets, and occlusion, enabling practical applications that require both high robustness and real-time performance.
Key words: machine vision; template matching; edge feature; image pyramid; visual dispensing
| 1 | MA J, JIANG X, FAN A,et al .Image matching from handcrafted to deep features:A survey[J].International Journal of Computer Vision,2021,129(1):23-79. |
| 2 | QI X, MIAO L .A template matching method for multiscale and rotated images using ring projection vector conversion[C]∥ Proceedings of the 2018 IEEE 3rd International Conference on Image,Vision and Computing (ICIVC).Chongqing:IEEE,2018:45-49. |
| 3 | KAI B,UWE D .Template matching using fast normalized cross correlation[EB/OL].[2022-10-20].. |
| 4 | BAI L, YANG X, GAO H .Corner point-based coarse-fine method for surface-mount component positioning[J].IEEE Transactions on Industrial Informatics,2018,14(3):877-886. |
| 5 | YANG H, ZHENG S, LU J,et al .Polygon-invariant generalized hough transform for high-speed vision-based positioning[J].IEEE Transactions on Automation Science and Engineering,2016,13(3):1367-1384. |
| 6 | DALAL N, TRIGGS B .Histograms of oriented gradients for human detection[C]∥ Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05).San Diego:IEEE,2005:886-893. |
| 7 | JIANG X, XIA Y, ZHANG X,et al .Robust image matching via local graph structure consensus[J].Pattern Recognition,2022,126:108588/1-14. |
| 8 | KE W, ZHANG T, HUANG Z,et al .Multiple anchor learning for visual object detection[C]∥ Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).Seattle:IEEE,2020:10203-10212. |
| 9 | ULRICH M, FOLLMANN P, NEUDECK J .A comparison of shape-based matching with deep-learning-based object detection[J].tm-Technisches Messen,2019,86(11):685-698. |
| 10 | HINTERSTOISSER S, CAGNIART C, ILIC S,et al .Gradient response maps for real-time detection of textureless objects[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(5):876-888. |
| 11 | PENG X .Combine color and shape in real-time detection of texture-less objects[J].Comput Vis Image Underst,2015,135:31-48. |
| 12 | WU Q, XU G, CHENG Y,et al .Histogram of maximal pointedge orientation for multi-source image matching[J].International Journal of Remote Sensing,Taylor & Francis,2020,41(14):5166-5185. |
| 13 | 吴晓军,邹广华 .基于边缘几何特征的高性能模板匹配算法[J].仪器仪表学报,2013,34(7):23-30. |
| WU Xiaojun, ZOU Guanghua .High performance template matching algorithm based on edge geometric features[J].Chinese Journal of Scientific Instrument,2013,34(7):23-30. | |
| 14 | CHAN J, LEE J A, KEMAO Q .BORDER:An oriented rectangles approach to texture-less object recognition [C]∥ Proceedins of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR).Las Vegas:IEEE,2016:2855-2863. |
| 15 | LE T S, LIN C Y .GPU-accelerated image alignment for object detection in industrial applications[C]∥ Proceedins of the 2017 International Conference on Advanced Robotics and Intelligent Systems (ARIS).Taipei:IEEE,2017:13-16. |
| 16 | TSAI C, YU C .Real-time textureless object detection and recognition based on an edge-based hierarchical template matching algorithm[J].Journal of Applied Science and Engineering,2018,21(2):229-240. |
| 17 | 王凯,余振军,何显辉,等 .改进的多尺度形状模板匹配算法[J].激光杂志,2022,43(4):82-87. |
| WANG Kai, YU Zhenjun, HE Xianhui,et al .Improved multi-scale shape template matching algorithm[J].Laser Journal,2022,43(4):82-87. | |
| 18 | ZHANG T, WEI S, JI S .E2EC:an end-to-end contour-based method for high-quality high-speed instance segmentation[C]∥ Proceedins of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).New Orleans:IEEE,2022:4433-4442. |
| 19 | 李华强,喻擎苍,方玫 .Canny算子中Otsu阈值分割法的运用[J].计算机工程与设计,2008(9):2297-2299. |
| LI Huaqiang, YU Qingcang, FANG Mei .Application of Otsu thresholding method on Canny operator [J].Computer Engineering and Design,2008(9):2297-2299. | |
| 20 | HOFHAUSER A, STEGER C, NAVAB N .Edge-based template matching with a harmonic deformation model[C]∥ RANCHORDAS A,ARAúJO H J,PEREIRA J M,et al.Proceedings of the International Conference on Computer Vision and Computer Graphics.Berlin,Heidelberg:Springer,2009:176-187. |
| 21 | B?TTGER T, STEGER C .Accurate and robust tracking of rigid objects in real time[J].Journal of Real-Time Image Processing,2021,18(3):493-510. |
| 22 | YU X, FEI X .Target image matching algorithm based on pyramid model and higher moments[J].Journal of Computational Science,2017,21:189-194. |
| 23 | CUI X, KIM H, PARK E,et al .Robust and accurate pattern matching in fuzzy space for fiducial mark alignment[J].Machine Vision and Applications,2013,24(3):447-459. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

