
收稿日期: 2021-08-22
网络出版日期: 2022-03-15
基金资助
湖南省创新型省份建设专项经费资助项目(2019GK1010);中南大学研究生自主探索创新项目(2022ZZTS0633)
Transmission Performance Analysis and Optimization Design of Grasping Module of Steel Arch Looping Mechanism
Received date: 2021-08-22
Online published: 2022-03-15
Supported by
Special Funding Support for the Construction of Innovative Provinces in Hunan Province(2019GK1010)
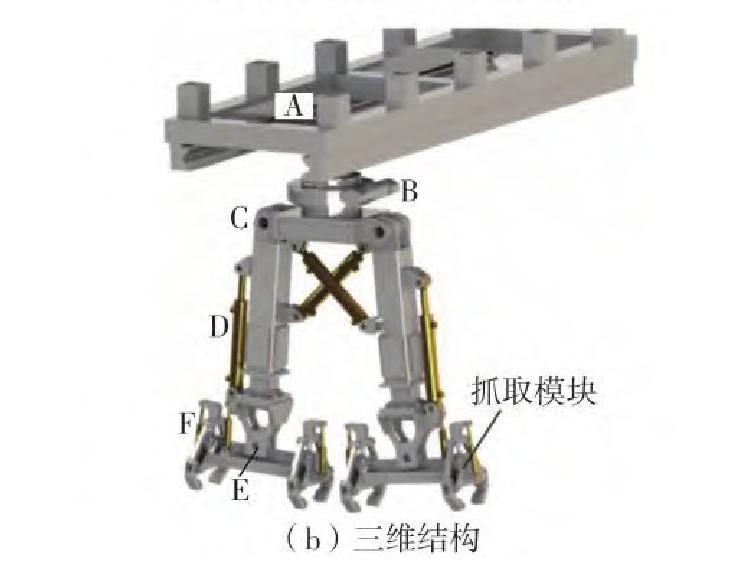
目前隧道掘进机(TBM)施工过程的钢拱架安装均采用人工操作的形式完成,作业环境非常恶劣,导致钢拱架支护效率低、劳动强度大、施工风险高。为此,笔者及其所在团队前期设计了一种钢拱架快速封口安装机构,用于代替人工完成钢拱架的封口作业。抓取模块作为该封口安装机构中直接与钢拱架接触的核心部件,需要具有足够的传动性能,以满足夹持作业需求。为此,文中基于螺旋理论,建立了其运动学模型,推导了输入旋量和输出旋量之间的虚拟系数,研究得到了抓取模块的传动性能,并提出了相应的传动指标;在此基础上,建立了抓取模块的尺寸参数优化模型,结合钢拱架封口件的实际抓取需求,得到抓取模块各尺寸参数的优化结果如下:卡爪与连杆的初始夹角
何源福, 夏毅敏, 李深远, 等 . 钢拱架封口机构抓取模块传动性能分析及优化设计[J]. 华南理工大学学报(自然科学版), 2022 , 50(8) : 82 -91 . DOI: 10.12141/j.issn.1000-565X.210534
At present, the installation of steel arch during the construction of tunnel boring machine (TBM) is completed by manual operation, and the working environment is very harsh, thus leads to the problems of low support efficiency, high labor intensity and high construction risk. Therefore, the authors and their team had designed a steel arch rapid-looping installation mechanism to replace manual operation. As the core part of the looping installation mechanism that directly contacts with the steel arch, the grasping module demands sufficient transmission performance to meet the requirements of clamping operation. Based on the screw theory, the paper established a kinema-tics model of the grasping module, and deduced the virtual coefficient between the input screw and the output screw. Then, the transmission performance of the grasping module was obtained and its transmission index was proposed. On this basis, the size parameter optimization model of grasping module was established. According to the actual grasping requirements of the steel arch looping parts, the optimization results of each size parameter were obtained as follows: the initial included angle between the jaw and the connecting rod is α = 88°, the initial position of the guide rod is lFJ = 170 mm, and the movement range of the guide rod is 0 ~ 63 mm. Using ADAMS software to analyze the posture change process of the grasping module from clamping to opening, it comes to the conclusion that, the distance between the ends of the jaws gradually increases from 50.0 mm to 234.6 mm, which meets the requirements of grasping space; the output torque increases first and then decreases. When the jaw is fully opened, the minimum torque is 21.23 N·m, which meets the output torque demand. Finally, the steel arch looping installation experiment shows that, the difference between the measured values and the calculated model is only 4.5 mm, which proves the correctness of the model; the whole looping installation time of the steel arch is 8.6 min. As compared with the traditional manual operation, the operation efficiency of the steel arch looping mechanism is improved by 20% ~ 70%.
| 1 | 余海东,李琳,赵勇,等 .复杂地质条件下TBM撑靴液压缸导向铜套微动损伤分析[J].机械工程学报,2018,54(1):74-81. |
| 1 | YU Haidong, LI Lin, ZHAO Yong,et al .Fretting damage of copper sleeve gasket in gripper cylinder of TBM excavating in complex geological structures[J].Journal of Mechanical Engineering,2018,54(1):74-81. |
| 2 | 夏毅敏,钱聪,李正光,等 .隧道掘进机支撑推进系统振动特性[J].浙江大学学报(工学版),2018,52(2):233-239,306. |
| 2 | XIA Yi-min, QIAN Cong, LI Zheng-guang,et al .Vibration characteristics of TBM supporting-thrusting system[J].Journal of Zhejiang University (Engineering Science),2018,52(2):233-239,306. |
| 3 | 陈玉羲,龚国芳,石卓,等 .基于施工数据的TBM支撑推进协调控制系统[J].浙江大学学报(工学版),2019,53(2):250-257. |
| 3 | CHEN Yu-xi, GONG Guo-fang, SHI Zhuo,et al .Coordinated control of gripper and thrust system for TBM based on construction data[J].Journal of Zhejiang University (Engineering Science),2019,53(2):250-257. |
| 4 | TAO J, LEI J, LIU C,et al .Nonlinear static and dynamic stiffness characteristics of support hydraulic system of TBM[J].Chinese Journal of Mechanical Engineering,2019,32(1):101. |
| 5 | XIA Y, GUO B, CONG G,et al .Numerical simulation of rock fragmentation induced by a single TBM disc cutter close to a side free surface[J].International Journal of Rock Mechanics & Mining Sciences,2017,91:40-48. |
| 6 | 霍军周,吴瀚洋,朱冬,等 .TBM机电耦合建模与同步控制策略对比分析[J].机械工程学报,2018,54(1):120-126. |
| 6 | HUO Junzhou, WU Hanyang, ZHU Dong,et al .TBM electromechanical coupling modeling and comparative analysis of synchronous drive control strategy[J].Journal of Mechanical Engineering,2018,54(1):120-126. |
| 7 | 何源福,夏毅敏,龙斌,等 .TBM钢拱架拼接机械手抓取对接机构[J].浙江大学学报(工学版),2020,54(11):2204-2213. |
| 7 | HE Yuan-fu, XIA Yi-min, LONG Bin,et al .Grasping docking mechanism of TBM steel arch splicing robot[J].Journal of Zhejiang University (Engineering Science),2020,54(11):2204-2213. |
| 8 | 何源福,龙斌,邓朝辉,等 .一种TBM钢拱架自动封口安装作业装置及作业方法:113441858A[P].2021-09-28. |
| 9 | WANG M, CHEN Q, LIU H,et al .Evaluation of the kinematic performance of a 3-RRS parallel mechanism[J].Robotica,2021,39(4):606-617. |
| 10 | 费宇,谢超,李华,等 .推杆针轮活齿齿形方程的简化建模与传动角分析[J].工程科学与技术,2019,51(1):241-247. |
| 10 | FEI Yu, XIE Chao, LI Hua,et al .Tooth profile simplified modeling and transmission angle analysis of push-rods oscillatory transmission with needle gears[J].Advanced Engineering Sciences,2019,51(1):241-247. |
| 11 | 刘辛军,王立平,吴泽启,等 .基于力传递性能的平面并联机器人的优化设计[J].清华大学学报(自然科学版),2008,48(11):1927-1930. |
| 11 | LIU Xinjun, WANG Liping, WU Zeqi,et al .Optimum design of a planar parallel robot based on force transmi-ssibility[J].Journal of Tsinghua University (Science and Technology),2008,48(11):1927-1930. |
| 12 | WANG J, LIU X, WU C .Optimal design of a new spatial 3-DOF parallel robot with respect to a frame-free index[J].Science in China Series E:Technological Sciences,2009,52(4):986-999. |
| 13 | LIANG X, TAKEDA Y .Transmission index of a class of parallel manipulators with 3-RS(SR) primary structures based on pressure angle and equivalent mechanism with 2-SS chains replacing RS chain[J].Mechanism and Machine Theory,2019,139:359-378. |
| 14 | 马广英,王光明,刘润晨,等 .串并混联四足机器人腿机构的设计及运动学分析[J].华南理工大学学报(自然科学版),2021,49(1):103-112. |
| 14 | MA Guangying, WANG Guangming, LIU Runchen,et al .Structure design and kinematics analysis on the serial-parallel leg of quadruped robots[J].Journal of South China University of Technology (Natural Science Edition),2021,49(1):103-112. |
| 15 | 陈炳发,丁旺生,丁力平,等 .新型空间5自由度并联机构的奇异位形分析与规避[J].华南理工大学学报(自然科学版),2014,42(11):7-13. |
| 15 | CHEN Bing-fa, DING Wang-sheng, DING Li-ping,et al .Singularity configuration analysis and avoidance of a new type of spatial 5-DOF parallel mechanism[J].Journal of South China University of Technology (Natural Science Edition),2014,42(11):7-13. |
| 16 | 王国彪,刘辛军 .初论现代数学在机构学研究中的作用与影响[J].机械工程学报,2013,49(3):1-9. |
| 16 | WANG Guobiao, LIU Xinjun .Role and influence of modern mathematics in mechanisms[J].China Mechanical Engineering,2013,49(3):1-9. |
| 17 | CHE L, CHEN G, JIANG H,et al .Dimensional synthesis for a Rec4 parallel mechanism with maximum transmission workspace[J].Mechanism and Machine Theory,2020,153:104008/1-16. |
| 18 | 刘海涛,熊坤,贾昕胤,等 .3自由度冗余驱动下肢康复并联机构的运动学优化设计[J].天津大学学报(自然科学与工程技术版),2018,51(4):357-366. |
| 18 | LIU Haitao, XIONG Kun, JIA Xinyin,et al .Kinematic optimization of a redundantly actuated 3-DOF pa-rallel mechanism for lower-limb rehabilitation[J].Journal of Tianjin University (Science and Technology),2018,51(4):357-366. |
| 19 | MENG Q, XIE F, LIU X,et al .An evaluation approach for motion-force interaction performance of parallel manipulators with closed-loop passive limbs[J].Mechanism and Machine Theory,2020,149:103844/1-20. |
| 20 | XIE F, LIU X .Design and development of a high-speed and high-rotation robot with four identical arms and a single platform[J].Journal of Mechanisms and Robotics:Transactions of the ASME,2015,7(4):041015. |
| 21 | WU G, BAI S, HJORNET P .Architecture optimization of a parallel Sch?nflies-motion robot for pick-and-place applications in a predefined workspace[J].Mechanism and Machine Theory,2016,106:148-165. |
| 22 | WU G, CARO S, WANG J .Design and transmission analysis of an asymmetrical spherical parallel manipulator[J].Mechanism and Machine Theory,2015,94:119-131. |
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

