
收稿日期: 2020-03-02
修回日期: 2020-09-20
网络出版日期: 2020-10-06
基金资助
国家国际科技合作专项资助 ( 2017YFE0134500) ; 汽车安全与节能国家重点实验室开放基金资助项目 ( KF2017)
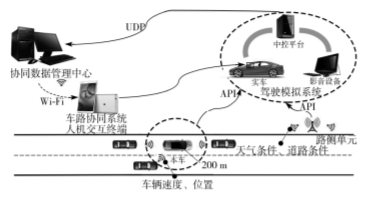
Driver's Visual Information Processing Mode in Foggy Highway Cooperative Vehicle-Infrastructure System Environment Based on Simulated Driving
Received date: 2020-03-02
Revised date: 2020-09-20
Online published: 2020-10-06
Supported by
Supported by the International Science & Technology Cooperation Program of China ( 2017YFE0134500)
李雪玮, 赵晓华, 李振龙, 等 . 基于雾天高速车路协同模拟驾驶的驾驶人视觉信息加工模式[J]. 华南理工大学学报(自然科学版), 2021 , 49(3) : 131 -138,148 . DOI: 10.12141/j.issn.1000-565X.200094
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

