
收稿日期: 2019-06-12
修回日期: 2019-08-07
网络出版日期: 2019-12-01
基金资助
国家自然科学基金资助项目 (61471263); 天津市自然科学基金资助项目 (16JCZDJC31100)
Stereo Matching Algorithm Based on Cross-scale Random Walk
Received date: 2019-06-12
Revised date: 2019-08-07
Online published: 2019-12-01
Supported by
Supported by the National Natural Science Foundation of China (61471263) and the Tianjin Municipal Natural Science Foundation (16JCZDJC31100)
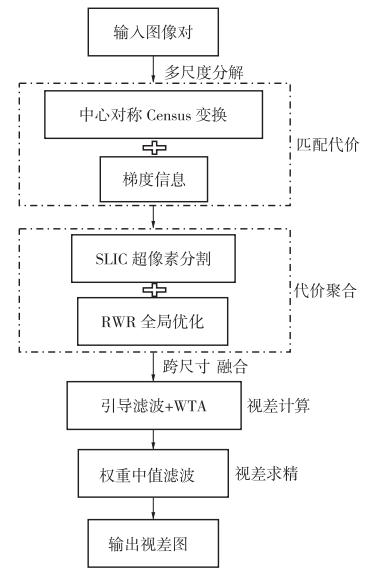
李锵, 段子阳, 张一帆, 等 . 基于跨尺度随机游走的立体匹配算法[J]. 华南理工大学学报(自然科学版), 2020 , 48(1) : 84 -92 . DOI: 10.12141/j.issn.1000-565X.190340
Key words: stereo matching; cross-scale; random walk; disparity refinement
/
| 〈 |
|
〉 |
地址:广州 五山 华南理工大学17号楼 邮政编码:510640
电话: 020-87111794 邮箱:journal@scut.edu.cn

