华南理工大学学报(自然科学版) ›› 2023, Vol. 51 ›› Issue (6): 10-19.doi: 10.12141/j.issn.1000-565X.220448
所属专题: 2023年交通运输工程
考虑侧向车换道影响的理论和数据组合驱动的车辆跟驰模型
赵建东1,2 焦岚馨1 赵志敏1 屈云超3 孙会君1
- 1.北京交通大学 交通运输学院,北京 100044
2.北京交通大学 综合交通运输大数据应用技术交通运输行业 重点实验室,北京 100044
3.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044
A Car-Following Model Driven by Combination of Theory and Data Considering Effects of Lane Change of Side Cars
ZHAO Jiandong1,2 JIAO Lanxin1 ZHAO Zhimin1 QU Yunchao3 SUN Huijun1
- 1.College of Traffic and Transportation,Beijing Jiaotong University,Beijing 100044,China
2.Key Laboratory of Transport Industry of Big Data Application Technologies for Comprehensive Transport,Beijing Jiaotong University,Beijing 100044,China
3.State Key Laboratory of Rail Transit Control and Safety,Beijing Jiaotong University,Beijing 100044,China
摘要:
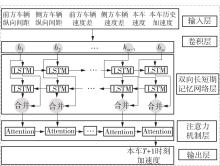
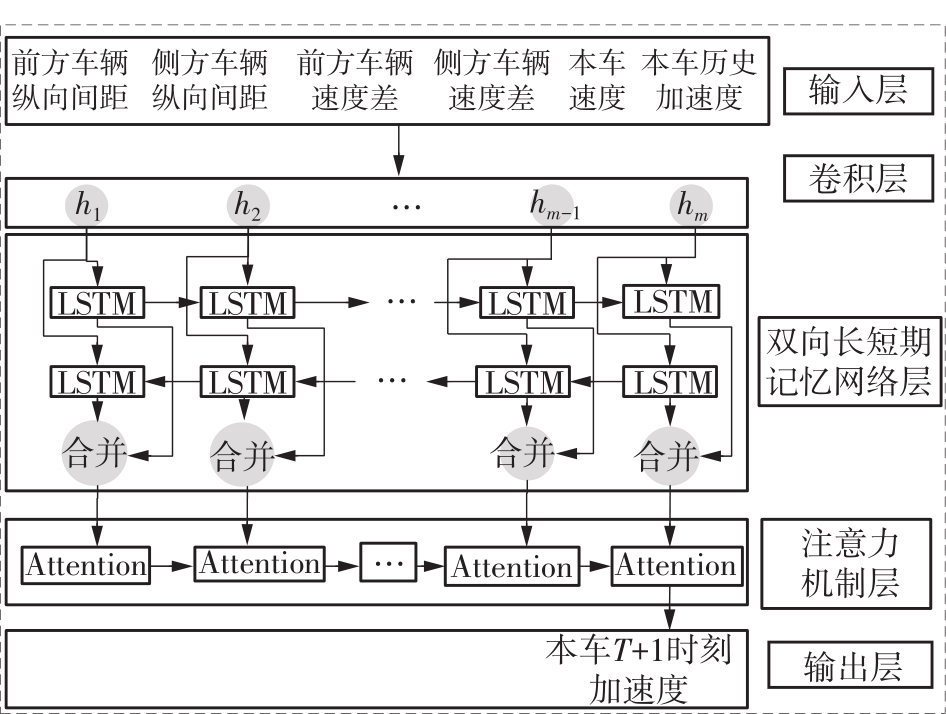
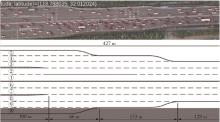
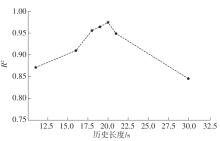
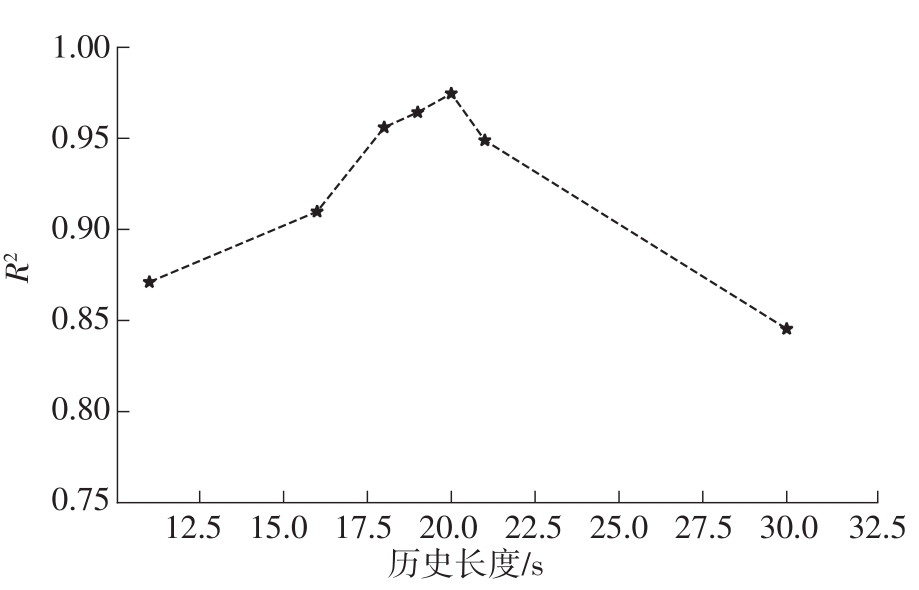
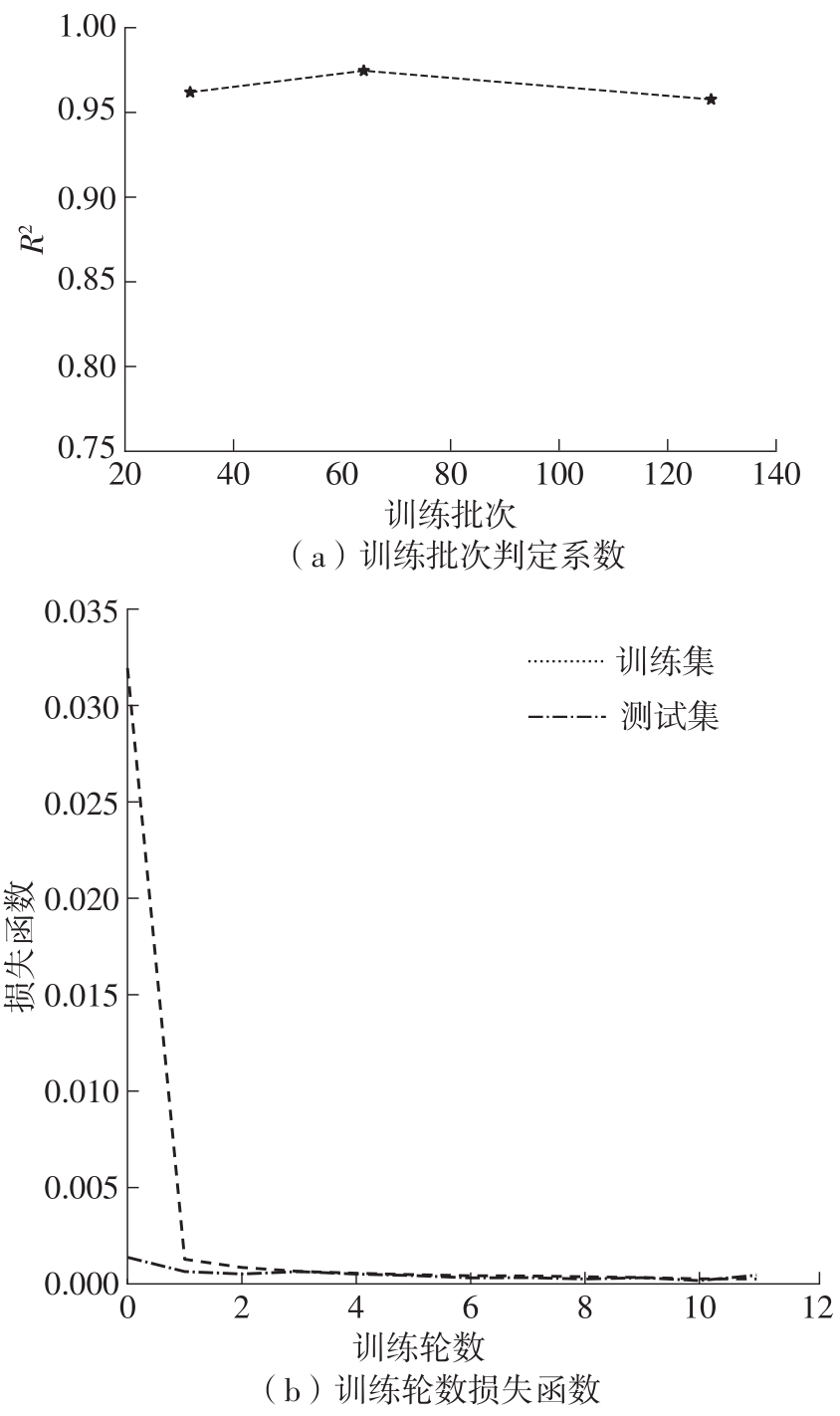
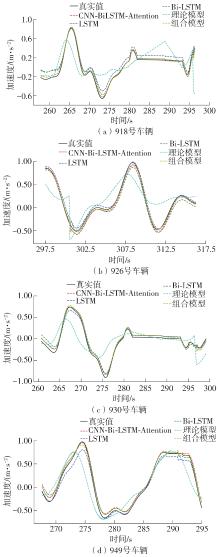
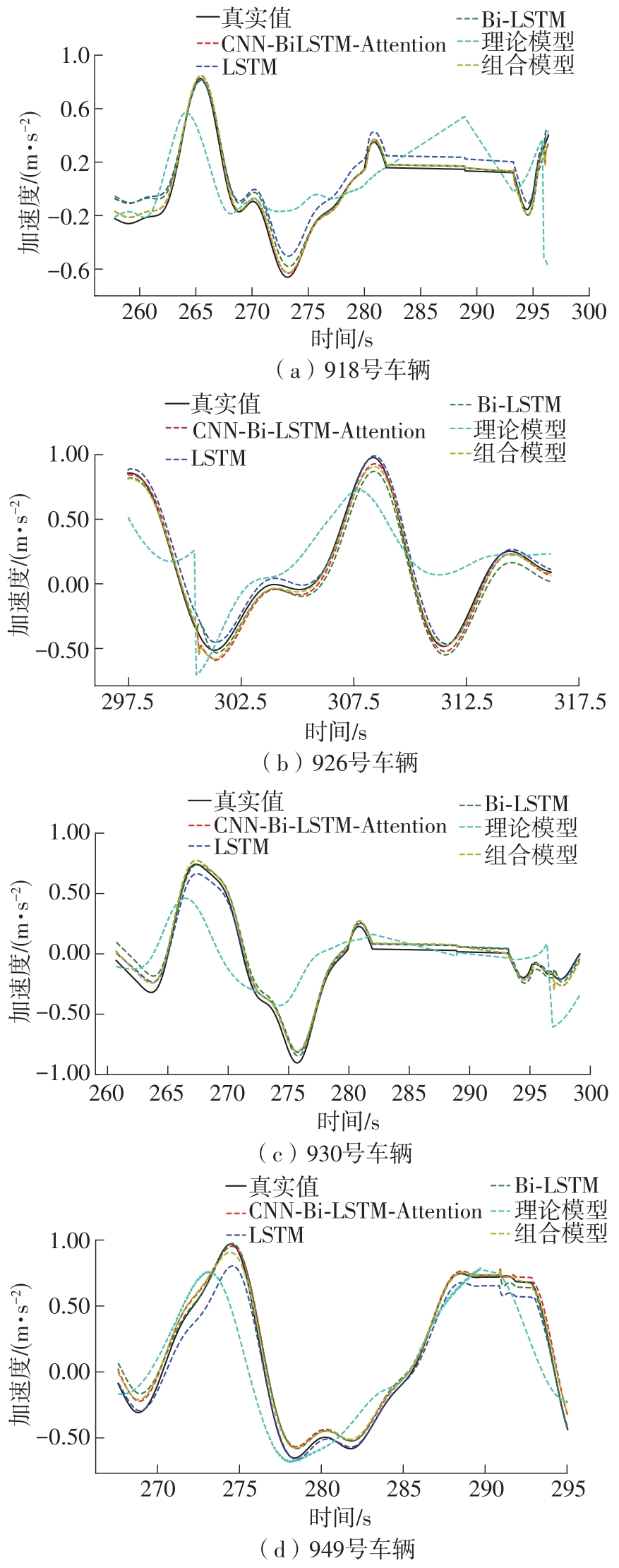
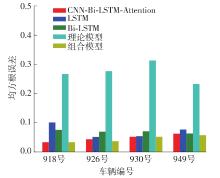
为分析受侧向车辆换道影响下的目标车辆跟驰行为,结合多速度差理论跟驰模型和深度学习方法,提出了一种理论-数据组合驱动跟驰模型。首先考虑了跟驰车辆对于前向车辆和侧向车辆保持安全车距和受车辆速度差影响的特性,提出了双车道多速度差跟驰模型(FS-MAVD模型),并利用差分进化算法进行模型参数标定。构建了CNN-Bi-LSTM-Attention数据驱动车辆跟驰模型,利用卷积神经网络层(CNN)充分提取前向和侧向车辆交通特征,双向长短期记忆网络层(Bi-LSTM)考虑驾驶员记忆效应,注意力机制层(Attention)用于分配模型权重,并基于数据进行驾驶员记忆时长、模型训练批次和训练轮数参数的训练。考虑理论模型广泛适用性和数据驱动模型接近真实值且平滑的特点,采用最优加权法将两种模型进行组合预测。利用无人机拍摄的快速路车辆轨迹数据,建立跟驰行为样本集,对所建模型进行训练和测试,并与LSTM模型、Bi-LSTM模型、CNN-Bi-LSTM-Attention模型、FS-MAVD理论模型的预测效果进行对比,并分别比对不同模型对不同车辆的预测精度和误差。结果表明,本研究构建的组合模型在加速度预测精度达到97.64%,预测均方根误差低至0.027,相比其他模型能更好地预测车辆受侧方车辆换道影响时的加减速情况,更好地分析目标车辆跟驰行为。
中图分类号: